清洁机器人的制作方法
1.本技术属于智能设备技术领域,具体涉及一种清洁机器人。
背景技术:
2.家用智能设备在人们的生活中发挥着越来越重要的作用,由此,越来越多的家用智能设备出现在人们的生活中。其中,清洁机器人是较为常见的一种家用智能设备。
3.清洁机器人设有滚刷,滚刷可以转动,进而实现清洁目的。清洁机器人工作一段时间后,需要将滚刷拆下清洗,由于滚刷安装于清洁机器人的底部,因此拆卸滚刷时,需要将清洁机器人整体翻转过来,然后再拆除滚刷。
4.然而,如果污水箱内的污水和集尘盒中的垃圾未清理干净,在翻转清洁机器人的过程中,污水和垃圾容易倾洒而出,不便于用户使用清洁机器人。与此同时,翻转清洁机器人这一动作也会导致滚刷上的垃圾掉落至清洁机器人的缝隙内,从而进一步进入清洁机器人内部,导致清洁机器人的可靠性变差。此外,翻转清洁机器人时容易损伤其外观面及其内部的零部件,同样导致清洁机器人的可靠性变差。
技术实现要素:
5.本技术实施例的目的是提供一种清洁机器人,能够解决清洁机器人不便于用户使用以及可靠性较差的问题。
6.为了解决上述技术问题,本技术是这样实现的:
7.一种清洁机器人,包括机器人主体、滚刷和滚刷支架,所述滚刷支架与所述机器人主体相连,所述滚刷支架设有容纳腔,所述滚刷可转动地设置于所述容纳腔,所述机器人主体的侧面设有抽取口,所述抽取口与所述容纳腔相连通,所述滚刷支架设有第一卡接部,所述滚刷的第一端设有第二卡接部,所述第一卡接部可与所述第二卡接部卡接配合,
8.在所述第一卡接部与所述第二卡接部分离的情况下,所述滚刷可通过所述抽取口自所述容纳腔移出。
9.在本技术实施例中,机器人主体的侧面设有抽取口,滚刷支架设有第一卡接部,滚刷的第一端设有第二卡接部,第一卡接部可与第二卡接部卡接配合,在第一卡接部与第二卡接部分离的情况下,滚刷可通过抽取口自滚刷支架的容纳腔移出。因此,需要拆下滚刷时,只需要使第一卡接部与第二卡接部分离,即可从机器人主体的侧面将滚刷抽出,而不需要翻转整个清洁机器人。由此可见,本技术实施例提供的清洁机器人可以解决清洁机器人不便于用户使用以及可靠性较差的问题。
附图说明
10.图1和图2分别为本技术实施例公开的清洁机器人在不同状态下的结构示意图;
11.图3为本技术实施例公开的清洁机器人的部分结构的示意图;
12.图4为本技术实施例公开的清洁机器人的部分结构的剖视图;
13.图5为图4中a处的局部放大图;
14.图6为本技术实施例公开的滚刷的部分结构的示意图;
15.图7为图6所示结构的爆炸图;
16.图8为图6所示结构的剖视图;
17.图9为图8中b处的局部放大图;
18.图10为图6所示结构的侧视图;
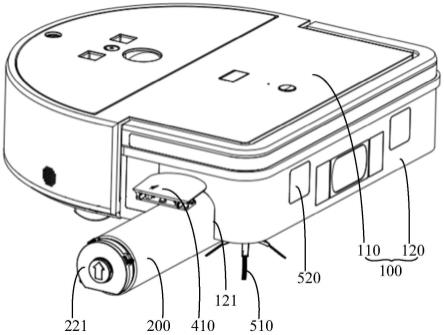
19.图11为本技术实施例公开的清洁机器人的局部结构示意图;
20.图12为图11所示结构在另一视角下的示意图。
21.附图标记说明:
22.100-机器人主体、110-机身、111-污水吸入口、120-前撞板、121-抽取口;
23.200-滚刷、210-刷体、211-第四卡接部、220-第一轴承端盖、221-前盖、222-后盖、223-轴承、224-轴承盖、224a-第三卡接部、224aa-连接臂、224ab-凸起、230-第二轴承端盖、240-滑块、241-第二卡接部、250-第一弹性件、260-解锁按钮、261-第一配合斜面、270-锁止块;
24.300-滚刷支架、310-第一卡接部;
25.410-装饰盖、420-第二弹性件、430-推杆、440-第三弹性件、450-转轴;
26.510-边刷、520-测距传感器。
具体实施方式
27.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施,且“第一”、“第二”等所区分的对象通常为一类,并不限定对象的个数,例如第一对象可以是一个,也可以是多个。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
29.下面结合附图,通过具体的实施例及其应用场景对本技术实施例提供的清洁机器人进行详细地说明。
30.如图1至图12所示,本技术实施例公开一种清洁机器人,其包括机器人主体100、滚刷200和滚刷支架300。
31.机器人主体100是清洁机器人的主体结构,其可以为清洁机器人所包含的功能部件提供安装基础,并保护这些功能部件。可选地,机器人主体100可以包括机身110和前撞板120,前撞板120可以设置于机身110的前部,前撞板120可以采用u形结构,当清洁机器人沿墙面等物体移动时,此种前撞板120可以更好地贴合这些物体。机身110背离前撞板120的一侧可以采用弧形结构,以减小清洁机器人所占用的空间。前撞板120的右前侧设有测距传感器520,该测距传感器520可以是激光传感器、超声波传感器等,其用于感知清洁机器人周围
的障碍物,从而实现避障功能;与此同时,当障碍物处于测距传感器520的盲区内时,清洁机器人可以通过前撞板120是否产生碰撞对障碍物进行感知,也能够达到避障的效果。
32.机器人主体100的底部设有万向轮、第一驱动轮、第二驱动轮、固定轮、边刷510和滚刷200,机身110的后部设有水箱。滚刷支架300与机器人主体100相连,该滚刷支架300用于安装滚刷200,滚刷支架300设有容纳腔,滚刷200可转动地设置于容纳腔,即滚刷200可以相对于容纳腔转动。清洁机器人运行时,可以通过第一驱动轮、第二驱动轮、万向轮和固定轮实现支撑,从而稳定运行。边刷510设置于机器人主体100底部的右侧靠前的位置处,机器人主体100设有污水吸入口111,该污水吸入口111位于滚刷200的后方,滚刷200的表面材质包括但不限于pvc(polyvinyl chloride,聚氯乙烯)海绵、硅橡胶、绒布等,滚刷200与地面之间存在一定的挤压量,该挤压量可以为0.5mm~2mm,以避免滚刷200与地面之间的摩擦力过大,从而防止清洁机器人打滑,同时也防止过多的机身重量施加在滚刷200上,进而造成驱动负载过大,使用寿命降低的问题。清洁机器人运行时,首先寻找墙边,并贴边清洁,边刷510转动时将边沿的垃圾带至滚刷200处,水箱内的水可以浸湿滚刷200,滚刷200转动进而清洁地面,同时将垃圾带至污水吸入口111处,以改善清洁效果,最终垃圾、污渍经污水吸入口111进入污水箱内。
33.机器人主体100的侧面设有抽取口121,抽取口121与容纳腔相连通,可选地,该抽取口121可以设置于前撞板120的侧面。滚刷支架300设有第一卡接部310,滚刷200的第一端设有第二卡接部241,第一卡接部310可与第二卡接部241卡接配合。可选地,第一卡接部310可以是凸部,第二卡接部241可以是凹槽,或者,第一卡接部310可以是凹槽,第二卡接部241可以是凸部,凸部可以插入凹槽内,从而实现第一卡接部310与第二卡接部241的卡接配合。
34.在第一卡接部310与第二卡接部241分离的情况下,滚刷200可通过抽取口121自容纳腔移出。因此,需要拆下滚刷200时,只需要使第一卡接部310与第二卡接部241分离,即可从机器人主体100的侧面将滚刷200抽出,之后可以清洗滚刷200,清洗完毕后,再通过抽取口121将其装入容纳腔,使得滚刷200可以继续使用。所以,采用本技术实施例公开的方案后,拆下滚刷200时不需要翻转整个清洁机器人。由此可见,本技术实施例提供的清洁机器人可以解决清洁机器人不便于用户使用以及可靠性较差的问题。
35.第一卡接部310和第二卡接部241中的至少一者可以变形,从而使得两者之间可以始终具有一定的干涉量,以保证卡接效果。另一实施例中,滚刷200包括刷体210、第一轴承端盖220、第二轴承端盖230、滑块240和第一弹性件250,其中:刷体210的两端分别与第一轴承端盖220和第二轴承端盖230转动连接,滑块240可滑动地设置于第一轴承端盖220,滑块240设有第二卡接部241,第一轴承端盖220的周向面开设有穿孔,第二卡接部241可穿过穿孔并与第一卡接部310相配合,第一弹性件250设置于第一轴承端盖220和滑块240之间,第一弹性件250可带动滑块240滑动,以使第一卡接部310与第二卡接部241分离。可选地,滑块240的滑动方向可以垂直于滚刷200的轴线;第一弹性件250可以是弹簧。该实施例通过滑块240的滑动实现第一卡接部310与第二卡接部241之间的配合以及分离,因此第一卡接部310和第二卡接部241不需要变形,两者的寿命更长。
36.用户可以直接向滑块240施加沿其滑动方向作用的力,从而驱动滑块240滑动。另一实施例中,滚刷200还包括解锁按钮260,解锁按钮260沿刷体210的延伸方向可滑动地设置于第一轴承端盖220,解锁按钮260设有第一配合斜面261,第一配合斜面261相对于延伸
方向倾斜设置,解锁按钮260可通过第一配合斜面261带动滑块240滑动,以使第一卡接部310与第二卡接部241相配合。可选地,滑块240可以设有与第一配合斜面261相贴合的第二配合斜面,从而增加两者的接触面积,第一配合斜面261和第二配合斜面与刷体210的轴线之间的夹角可以小于或等于45
°
。用户按压解锁按钮260时,解锁按钮260通过第一配合斜面261带动滑块240移动,从而使得第一卡接部310与第二卡接部241相配合;当解锁按钮260反向滑动时,解锁按钮260不再向滑块240施加作用力,第一弹性件250带动滑块240反向滑动,从而使得第一卡接部310和第二卡接部241分离。由于解锁按钮260的滑动方向为滚刷200的延伸方向,因此用户可以更方便地向滚刷200施加作用力,使得滚刷200的拆卸操作更加方便。
37.当解锁按钮260带动滑块240滑动到位时,解锁按钮260可以依靠其与第一轴承端盖220之间的摩擦力保持固定不动,或者,滚刷200还包括锁止块270,锁止块270设置于第一轴承端盖220,解锁按钮260与锁止块270相对设置,在解锁按钮260与锁止块270锁止配合的情况下,第一卡接部310与第二卡接部241相配合;在锁止块270释放解锁按钮260的情况下,第一卡接部310与第二卡接部241分离。锁止块270设有可伸缩的锁舌,当用户按压解锁按钮260时,解锁按钮260可以按压该锁舌,从而使得锁舌向锁止块270的内部缩回,从而可靠地限制解锁按钮260的位置,而当用户再一次按压解锁按钮260时,锁舌可以在解锁按钮260的作用下向锁止块270的外部伸出,从而释放解锁按钮260。解锁按钮260与锁止块270之间的配合作用力较大,因此可以可靠地防止解锁按钮260在第一弹性件250的作用力下被滑块240推动,而无法使滑块240保持在使第一卡接部310和第二卡接部241配合的位置。
38.可选的实施例中,第一轴承端盖220包括前盖221、后盖222、轴承223和轴承盖224,前盖221设置于后盖222背离刷体210的一侧,轴承223和轴承盖224设置于后盖222背离前盖221的一侧,轴承盖224可通过卡扣套设于轴承223外部,且其设有第三卡接部224a,刷体210设有第四卡接部211,第三卡接部224a与第四卡接部211卡接配合。此实施例中,轴承盖224通过卡接的方式与刷体210相连,从而便于将轴承盖224自刷体210上拆下,从而实现滚刷200的深度清理。
39.上述第三卡接部224a和第四卡接部211中,一者可为凸起224ab,另一者可以为配合槽,凸起224ab可以直接设置于轴承盖224的外周面或滚刷支架300的内周面。另一可选的实施例中,第三卡接部224a包括连接臂224aa和凸起224ab,连接臂224aa的一端与轴承盖224的外周面相连,连接臂224aa的另一端为自由端,自由端设有凸起224ab,凸起224ab可与第四卡接部211相配合。可选地,这里的凸起224ab可以是半球形凸起,以便于凸起224ab与第四卡接部211配合;第四卡接部211可以是安装孔,凸起224ab与安装孔之间可以预留1mm左右的间隙。连接臂224aa可与轴承盖224的外周面共同形成u形结构,连接臂224aa的自由端悬臂设置,因此连接臂224aa更容易发生变形,以便于第三卡接部224a与第四卡接部211之间的配合,以及两者的分离。
40.滚刷200可以相对于抽取口121外露,或者,清洁机器人还包括装饰盖410,装饰盖410可转动地设置于抽取口121处,在第一卡接部310与第二卡接部241相配合的情况下,装饰盖410覆盖滚刷200的第一端。换言之,当滚刷200安装于容纳腔中时,装饰盖410可以遮挡滚刷200,使得灰尘、污渍等不容易粘附于滚刷200的表面,甚至进入滚刷200的内部。同时,该装饰盖410可以起到装饰作用,从而改善清洁机器人的外观性能。
41.进一步可选的实施例中,清洁机器人还包括第二弹性件420,第二弹性件420连接于装饰盖410与机器人主体100之间。装饰盖410可以通过转轴450与机器人主体100相连,第二弹性件420可以是扭簧,该扭簧可以套设在转轴450的外部,其一端与机器人主体100抵靠,另一端与装饰盖410抵靠,从而向装饰盖410施加使其靠近抽取口121或远离抽取口121的作用力,因此用户不向装饰盖410施加作用力的情况下,装饰盖410可以可靠地封堵抽取口121,而不容易相对于清洁机器人转动,或者装饰盖410可以自动远离抽取口121,以便于用户操作。可选地,这里的第二弹性件420可以是扭簧,本技术实施例对此不做限制。
42.可选地,用户可以直接向装饰盖410的底部边沿施加作用力,以驱动装饰盖410转动。或者,清洁机器人还包括推杆430和第三弹性件440,推杆430可滑动地设置于装饰盖410,第三弹性件440连接于推杆430和装饰盖410之间,在第一卡接部310与第二卡接部241相配合的情况下,推杆430与机器人主体100卡接配合。用户可以向推杆430施加作用力,以解除推杆430与机器人主体100之间的配合,此时装饰盖410可以在第二弹性件420的作用下远离抽取口121,以便于用户取出滚刷200。可选地,推杆430的数量可以为两个,用户的两根手指可分别作用于该两个推杆430,从而便于施加作用力;这里的第三弹性件440可以是弹簧。
43.第一卡接部310和第二卡接部241的数量均可以为一个,为了提升滚刷200与滚刷支架300之间的连接可靠性,可将第一卡接部310和第二卡接部241的数量均设置为至少两个,各第二卡接部241沿滚刷200的周向间隔设置,各第一卡接部310与各第二卡接部241一一对应设置。随着第一卡接部310和第二卡接部241的数量增加,滚刷200与滚刷支架300之间的连接位置增多,且连接面积增大,因此滚刷200可以可靠地与滚刷支架300相连,并且两者之间的作用力分布得更加均匀,而不容易出现应力集中的问题。
44.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1