一种扫地机器人以及扫地机器人系统的制作方法
1.本实用新型属于扫地机器人领域,尤其涉及一种扫地机器人以及扫地机器人系统。
背景技术:
2.目前市面上的扫地机器人中的脏污箱,可能装污水,也可能装污物,且设置在扫地机内部,使用不了多长的时间,就会繁殖大量细菌。或者用户家中长期无人,机器人在家里自动打扫后,没来得及清理脏污箱,细菌大量繁殖,有可能将扫地机器人内部其它部件污染,影响使用,难以清洁,甚至传播疾病。
3.现有技术中,也有在扫地机器人本体内置杀菌装置,但这样导致扫地机器人本体体积大、不利于产品的小巧化,用户体验欠佳。
技术实现要素:
4.本实用新型的目的在于克服上述现有技术的不足,提供了一种扫地机器人以及扫地机器人系统,用户体验佳。
5.本实用新型的技术方案是:一种扫地机器人,包括扫地机器人本体,所述扫地机器人本体具有用于容纳污水或污物的脏污箱,所述脏污箱靠近于或至少部分位于所述扫地机器人本体的表面,且所述脏污箱至少在局部透光形成透光部位,所述扫地机器人本体设置有使所述透光部位外露的外露结构,以使所述透光部位可被基站发出的杀菌射线照射。
6.可选地,所述透光部位位于所述扫地机器人本体的顶面、侧面和底面中的至少一处。
7.可选地,所述外露结构为设置于所述扫地机器人本体且用于安装所述脏污箱的安装槽,所述安装槽与所述扫地机器人本体外周相贯通。
8.可选地,所述外露结构包括可以开启的活动门,所述脏污箱位于所述活动门的内侧。
9.可选地,所述活动门转动或滑动连接于所述扫地机器人本体,所述活动门连接有电动驱动结构,所述电动驱动结构用于在所述机器本体对接于基站时驱动所述活动门开启。
10.可选地,所述外露结构包括升降驱动部件,用于驱动所述脏污箱升降而露出所述扫地机器人本体或缩回所述扫地机器人本体;所述升降驱动部件设置于扫地机器人本体内且连接于所述脏污箱。
11.可选地,所述脏污箱于所述透光部位处设置有漫反射结构,用于将外部杀菌光线折射至脏污箱各方向。
12.本实用新型还提供了一种扫地机器人系统,包括上述的一种扫地机器人,还包括基站,所述基站设置有杀菌射线发生器,所述扫地机器人对接于所述基站时,所述杀菌射线发生器朝向于所述脏污箱的透光部位。
13.可选地,所述杀菌射线发生器为紫外线灯。
14.可选地,所述紫外线灯连接有感应开关,所述扫地机器人设置有靠近时触发所述感应开关的感应器件。
15.本实用新型所提供的一种扫地机器人以及扫地机器人系统,无需在扫地机器人本体内部设置消杀系统部件,利于优化产品内部布局,有利于产品的小巧化,扫地机器人本体的体积和重量较小,利于清扫低矮空间(例如沙发底等处) 以及提高续航能力,且可以避免脏污箱的细菌大量繁殖而导致的污染,避免异味、传播疾病等不良现象,且使脏污箱易于清洁,用户体验更佳。
附图说明
16.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
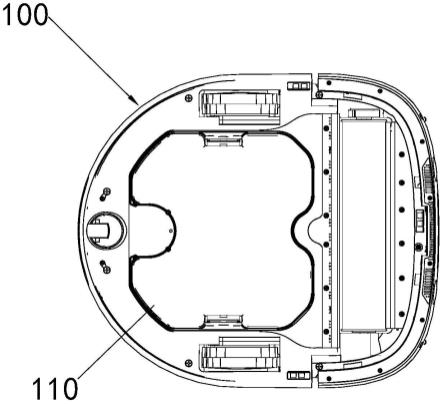
17.图1是本实用新型实施例提供的一种扫地机器人的平面示意图;
18.图2是本实用新型实施例提供的一种扫地机器人的平面示意图;
19.图3是本实用新型实施例提供的一种扫地机器人系统中基站的平面示意图;
20.图4是本实用新型实施例提供的一种扫地机器人系统中基站的俯视平面示意图。
具体实施方式
21.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
22.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
23.另外,本实用新型实施例中若有“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系的用语,其为基于附图所示的方位或位置关系或常规放置状态或使用状态,其仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的结构、特征、装置或元件必须具有特定的方位或位置关系、也不是必须以特定的方位构造和操作,因此不能理解为对本实用新型的限制。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
24.在具体实施方式中所描述的各个具体技术特征和各实施例,在不矛盾的情况下,可以通过任何合适的方式进行组合,例如通过不同的具体技术特征/实施例的组合可以形成不同的实施方式,为了避免不必要的重复,本实用新型中各个具体技术特征/实施例的各种可能的组合方式不再另行说明。
25.如图1至图4所示,本实用新型实施例提供的一种扫地机器人,包括扫地机器人本体100,所述扫地机器人本体100具有用于容纳污水(液态)或污物 (非液态)的脏污箱110,所述脏污箱110靠近于或至少部分位于所述扫地机器人本体100的表面,且所述脏污箱110
至少在局部透光形成透光部位,所述扫地机器人本体100设置有外露结构,外露结构用于使所述透光部位外露,以使所述透光部位可被基站200发出的杀菌射线照射,杀菌射线可为紫外射线。这样,无需在扫地机器人本体100内部设置消杀系统部件,利于优化产品内部布局,有利于产品的小巧化,扫地机器人本体100的体积和重量较小,利于清扫低矮空间(例如沙发底等处)以及提高续航能力,且可以避免脏污箱110的细菌大量繁殖而导致的污染,避免异味、传播疾病等不良现象,且使脏污箱110 易于清洁,用户体验更佳。
26.具体地,所述透光部位可位于所述扫地机器人本体100的顶面、侧面和底面中的至少一处。
27.具体地,所述外露结构为设置于所述扫地机器人本体100且用于安装所述脏污箱110的安装槽,所述安装槽与所述扫地机器人本体100外周相贯通,安装脏污箱110后,脏污箱110至少一面外露于扫地机器人本体100。例如,脏污箱110可以连接于扫地机器人本体100的底部,至少使脏污箱110的底部外露于扫地机器人本体100,基站200的紫外灯可以朝上。当然,在一些可能的实施方式中,脏污箱110也可以外露于扫地机器人本体100的顶部或/和侧部。
28.或者,所述外露结构包括可以开启的活动门,所述脏污箱110位于所述活动门的内侧。脏污箱110外露于扫地机器人本体100的顶部时,在基站200之外,可以通过活动门遮挡脏污箱110,设备外观美观大方。基站200中的杀菌射线发生器(紫外灯)可以朝下设置,正常情况下可以有效避免人眼直视。
29.具体地,所述活动门可转动或滑动连接于所述扫地机器人本体100,所述活动门连接有电动驱动结构,所述电动驱动结构用于在所述机器本体对接于基站200时驱动所述活动门开启,自动化程度高。
30.或者,所述外露结构包括升降驱动部件,用于驱动所述脏污箱110升降而露出所述扫地机器人本体100或缩回所述扫地机器人本体100;所述升降驱动部件设置于扫地机器人本体100内且连接于所述脏污箱110,脏污箱110可以通过伸缩的方式外露,外露部分的面积更大,细菌病毒的消杀效果好。升降驱动部件可为直线电机等驱动部件。当然,也可以采用固定式的脏污箱110,即脏污箱110可以通过卡槽、卡扣结构连接于安装槽。
31.具体地,所述脏污箱110于所述透光部位处可以设置有漫反射结构,用于将外部杀菌光线折射至脏污箱110各方向。漫反射结构可为凹凸不平的微结构,可以使杀菌光线(紫外线)被折射至不同的方向,照射的范围更大,更利于脏污箱110侧壁、角落处的消杀。当然,也可以不设置上述漫反射结构。具体应用中,可以在脏污箱110设置反射层,也可以使杀菌光线(紫外线)被反射至不同方位,增加消杀范围。脏污箱110以采用透明塑料制成,当然,脏污箱110 可以将局部设定为照射位,漫反射结构可以设置于照射位的内侧处。
32.本实用新型还提供了一种扫地机器人系统,包括上述的一种扫地机器人,还包括基站200,所述基站200设置有杀菌射线发生器210,所述扫地机器人对接于所述基站200时,所述杀菌射线发生器210朝向于所述脏污箱110的透光部位,无需在扫地机器人本体100内部设置消杀系统部件,利于优化产品内部布局,有利于产品的小巧化,扫地机器人本体100的体积和重量较小,利于清扫低矮空间(例如沙发底等处)以及提高续航能力,且可以避免脏污箱110的细菌大量繁殖而导致的污染,避免异味、传播疾病等不良现象,且使脏污箱110 易于清洁,用户体验更佳。杀菌射线发生器210可以设置于基站200的内侧壁、内顶壁或内底
壁中的至少一处,使杀菌射线发生器210可以朝向于所述脏污箱110的透光部位。本实施例中,杀菌射线发生器210设置于基站200的底板且朝上设置,脏污箱110设置于扫地机器人本体100的底部,扫地机器人本体100 与基站200对接时,脏污箱110位于杀菌射线发生器210的上方,杀菌射线发生器210朝上照射而对脏污箱110进行杀菌。
33.具体地,所述杀菌射线发生器210可为紫外线灯,应用成本低,且相对安全。
34.具体地,所述紫外线灯可以连接有感应开关,所述扫地机器人设置有靠近时触发所述感应开关的感应器件。感应开关可以为霍尔开关,感应器件可以为磁铁,只有感应器件靠近于感应开关时,紫外线灯才可通电工作,避免扫地机器人未到位时启动紫外线灯,安全可靠性佳。当然,紫外线灯还可由其它串联的控制开关进行控制,在设定条件时启动,感应开关可以增加安全可靠性。
35.具体地,基站200可以设置有容舱,扫地机器人可以局部或全部进入容舱,紫外线灯可以设置于容舱内。紫外线灯一侧可以选择设置有人体接近传感器(可为红外式人体传感器),人体靠近时,可以自动切断紫外线灯的电源。
36.本实用新型所提供的一种扫地机器人以及扫地机器人系统,无需在扫地机器人本体100内部设置消杀系统部件,利于优化产品内部布局,有利于产品的小巧化,扫地机器人本体100的体积和重量较小,利于清扫低矮空间(例如沙发底等处)以及提高续航能力,且可以避免脏污箱110的细菌大量繁殖而导致的污染,避免异味、传播疾病等不良现象,且使脏污箱110易于清洁,用户体验更佳。
37.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1