一种地拖装置以及洗地机的制作方法
1.本实用新型涉及清洁设备技术领域,尤其涉及一种地拖装置以及洗地机。
背景技术:
2.目前,传统的家用吸尘器/洗地机地刷等清洁设备,通常具有滚刷及刮水条附件,当清洁设备在清洁地面时,通过滚刷的转动将灰尘和碎屑等污物卷起并收集,然而市面传统的清洁设备只在滚刷的后方设置了刮水条及吸口,使得清洁设备的清洁效果较差。如公开号为cn113171032a的中国专利,其公开了一种扫拖一体分离式洗地机及扫拖方法,一种扫拖一体分离式洗地机包括拖头组件、连接软管和机身组件,在拖头组件中设置有扫地地刷和拖地滚刷分别用于扫地和拖地,在拖地滚刷的上方或侧方设置有喷头,显然,该洗地机无法保证在来回推拉机器时,能够使地面不会残留水痕,清洁效果较差。
技术实现要素:
3.针对现有技术中存在的上述技术问题,本实用新型提供了一种地拖装置以及洗地机,该地拖装置实现了无论是前推还是后拉,都能够由刮水组件的第一刮水组件和第二刮水组件二者中的一个来实现对地面的清洁,从而达到较佳的清洁效果。
4.本实用新型实施例提供了一种地拖装置,包括机壳和滚刷,还包括:
5.传感组件,其设于所述机壳和滚刷上,用于检测所述滚刷的转向信息;
6.刮水组件,其包括交替工作的第一刮水组件和第二刮水组件,所述第一刮水组件包括升降机构和设于所述滚刷前方的前水刮,所述前水刮设于所述机壳上且在所述升降机构的作用下能够相对所述机壳升降,所述第二刮水组件包括设于所述机壳内且位于所述滚刷后方的后水刮;
7.吸尘组件,其具有抽吸源以及与所述抽吸源连通的第一抽吸通道和第二抽吸通道,所述第一抽吸通道朝向所述前水刮,所述第二抽吸通道朝向所述后水刮,所述第一抽吸通道和所述第二抽吸通道的连接处设有电控阀;
8.控制组件,其与所述传感组件、升降机构以及电控阀电连接,所述控制组件用于接收所述转向信息,并控制所述升降机构使所述前水刮相对所述机壳上升以及控制所述第二抽吸通道打开以使所述后水刮进入工作状态,或控制所述升降机构使所述前水刮相对所述机壳下降以及控制所述第一抽吸通道打开以使所述前水刮进入工作状态。上述地拖装置实现了无论是前推还是后拉,都能够由刮水组件的第一刮水组件和第二刮水组件二者中的一个来实现对地面的清洁,从而达到较佳的清洁效果。
9.在一些实施例中,所述控制组件还用于接收所述传感组件检测的所述滚刷向前滚动的第一转向信息,并向所述电控阀发送使第二抽吸通道打开,第一抽吸通道关闭的第一控制信息,以及向所述升降机构发送使所述前水刮相对所述机壳上升的第二控制信息;
10.所述控制组件还用于接收所述传感组件检测的所述滚刷向后滚动的第二转向信息,并向所述电控阀发送使第二抽吸通道关闭,第一抽吸通道打开的第三控制信息,以及向
所述升降机构发送使所述前水刮相对所述机壳下降的第四控制信息。
11.在一些实施例中,所述升降机构包括电磁体和磁性体,所述电磁体设于所述机壳靠近所述前水刮处,所述磁性体设于所述前水刮上,所述电磁体与所述控制组件电连接,用于在通电后产生与所述磁性体相吸附的磁场。上述电磁体与磁性体之间的吸附关系随电能供应而发生变化,便于控制和调节。
12.在一些实施例中,所述机壳朝下的一侧设有前进污口,所述前水刮在下降时靠近所述前进污口,且在上升时远离所述前进污口,所述电磁体靠近所述前进污口设置。上述结构紧凑,且设计合理。
13.在一些实施例中,所述前水刮的上部凸设有导向柱,所述导向柱穿设于所述机壳,且所述导向柱穿出所述机壳的一端设有止挡件,以限制所述导向柱脱出所述机壳。上述导向柱能够对前水刮的上下运动起到导向作用,提高了前水刮的运动稳定性。
14.在一些实施例中,所述第一刮水组件还包括套设于所述导向柱外的弹性件,所述弹性件的一端抵于所述机壳的下侧,另一端抵于所述前水刮,且所述弹性件用于向所述前水刮施加使其向背离所述机壳方向运动的作用力。如此,在升降机构与前水刮之间的吸附力随停止为升降机构供电而消失时,通过弹性件的作用力以及前水刮自身的重量能够使前水刮顺利地下降于机壳。
15.在一些实施例中,所述传感组件包括霍尔传感器和感应磁铁,所述霍尔传感器设于所述机壳上,所述感应磁铁设于所述滚刷上,所述霍尔传感器和感应磁铁相配合以检测所述转向信息。上述传感组件能够准确地检测滚刷的转向,且结构设计简单,布局合理。
16.在一些实施例中,所述电控阀构造为电磁三通阀,所述电磁三通阀的一端口连接于所述抽吸源,另外两端口分别连接于所述第一抽吸通道和第二抽吸通道,所述电磁三通阀用于控制所述第一抽吸通道和所述第二抽吸通道中的一个打开,另一个关闭。如此,通过控制组件对电磁三通阀的电控,可实现通过第一刮水组件或第二刮水组件进行清洁。
17.本实用新型实施例还提供了一种洗地机,包括上述的地拖装置。采用上述地拖装置的洗地机实现了无论是前推还是后拉,都能够由刮水组件的第一刮水组件和第二刮水组件二者中的一个来实现对地面的清洁,从而达到较佳的清洁效果。
18.在一些实施例中,所述洗地机还包括与所述抽吸源连通的集污箱,所述抽吸源用于将经由所述第一抽吸通道和第二抽吸通道吸入的赃物吸向所述集污箱内。上述洗地机的结构紧凑,且设计合理。
19.与现有技术相比,本实用新型实施例的有益效果在于:本实用新型通过控制组件对吸尘组件的第一抽吸通道和第二抽吸通道,以及对刮水组件的控制,实现了在向前推动地拖装置,或向后拉动地拖装置时,能够根据传感组件所检测到的转向信息控制由刮水组件的第一刮水组件和第二刮水组件二者中的一个来实现对地面的清洁,即滚刷向前滚动时第二抽吸通道打开及第一抽吸通道关闭,使前水刮相对机壳上升,通过后水刮清洁地面,滚刷向后滚动时第一抽吸通道打开及第二抽吸通道关闭,使前水刮相对机壳下降,通过前水刮清洁地面,达到了无论是前推还是后拉地拖装置,地面都不会有水痕的目的,从而达到较佳的清洁效果。
附图说明
20.在不一定按比例绘制的附图中,相同的附图标记可以在不同的视图中描述相似的部件。具有字母后缀或不同字母后缀的相同附图标记可以表示相似部件的不同实例。附图大体上通过举例而不是限制的方式示出各种实施例,并且与说明书以及权利要求书一起用于对所公开的实施例进行说明。在适当的时候,在所有附图中使用相同的附图标记指代同一或相似的部分。这样的实施例是例证性的,而并非旨在作为本装置或方法的穷尽或排他实施例。
21.图1为本实用新型实施例地拖装置的部分结构示意图;
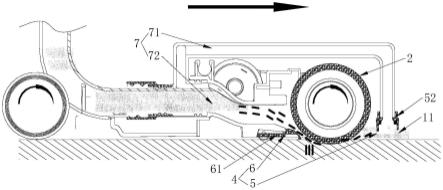
22.图2为本实用新型实施例地拖装置的剖视图,图中示出的是向前推动地拖装置的状态;
23.图3为本实用新型实施例地拖装置的剖视图,图中示出的是向后拉动地拖装置的状态;
24.图4为本实用新型实施例地拖装置的第一刮水组件的剖视图,图中示出的前水刮组件处于下降状态;
25.图5为本实用新型实施例地拖装置的第一刮水组件的剖视图,图中示出的前水刮组件处于上升状态;
26.图6为本实用新型实施例洗地机的结构示意图。
27.图中的附图标记所表示的构件:
28.100-地拖装置;200-洗地机;1-机壳;11-前进污口;2-滚刷;21-主动轮;3-传感组件;31-霍尔传感器;32-感应磁铁;4-刮水组件;5-第一刮水组件;51-升降机构;52-前水刮;53-电磁体;54-磁性体;55-导向柱;56-止挡件;57-弹性件;6-第二刮水组件;61-后水刮;7-吸尘组件;71-第一抽吸通道;72-第二抽吸通道。
具体实施方式
29.为使本领域技术人员更好的理解本实用新型的技术方案,下面结合附图和具体实施方式对本实用新型作详细说明。
30.本实用新型实施例提供了一种地拖装置100,如图1至图3所示,地拖装置100包括机壳1、滚刷2、传感组件3、刮水组件4、吸尘组件7以及控制组件。传感组件3设于机壳1和滚刷2上,用于检测滚刷2的转向信息。刮水组件4包括交替工作的第一刮水组件5和第二刮水组件6。如图4和图5所示,第一刮水组件5包括升降机构51和设于滚刷2前方的前水刮52,前水刮52设于机壳1上且在升降机构51的作用下能够相对机壳1下降或上升,第二刮水组件6包括设于机壳1内且位于滚刷2后方的后水刮61。吸尘组件7具有抽吸源以及与抽吸源连通的第一抽吸通道71、第二抽吸通道72,第一抽吸通道71朝向前水刮52,第二抽吸通道72朝向后水刮61,第一抽吸通道71和所述第二抽吸通道72的连接处设有电控阀。控制组件与传感组件3、升降机构51以及电控阀电连接,控制组件用于接收转向信息,并控制升降机构51使前水刮52相对机壳1上升以及控制第二抽吸通道72打开以使后水刮61进入工作状态,或控制升降机构51使前水刮52相对机壳1下降以及控制第一抽吸通道71打开以使前水刮52进入工作状态。
31.具体地,上述控制组件能够根据转向信息确定后水刮61进入工作状态,还是前水
刮52进入工作状态。需要强调的是,在上述地拖装置100由关机状态进入开机状态时,即地拖装置100在开机时,控制组件并不会基于传感组件3所检测到的转向信息再选择前水刮52和后水刮61中的一个进入工作状态,而是直接由后水刮61进入工作状态,即地拖装置100在开机时会直接使后水刮61进入工作状态,此时,前水刮52相对机壳1上升,且控制组件控制第二抽吸通道72打开,第一抽吸通道71关闭,以使得地拖装置100能够快速工作,且符合用户在使用地拖装置100清洁地面初始时会向前推动的操作习惯。
32.具体地,上述转向信息至少包括滚刷2向前滚动的第一转向信息,以及滚刷2向后滚动的第二转向信息,传感组件3在检测到转向信息后,控制组件可接受该转向信息,并基于该转向信息控制刮水组件4的第一刮水组件5或第二刮水组件6工作以清洁地面。
33.具体地,如图2和图3所示,上述滚刷2的前方和后方可理解为沿垂直于滚刷2的轴向方向依次的两个方向。
34.继续结合图2和图3,图2中示出的是向前推动地拖装置100的示意图,图3中示出的是向后拉动地拖装置100的示意图。上述控制组件具体在接收到第一转向信息后,控制组件可向升降机构51供电,通过升降机构51的吸附力使前水刮52在升降机构51作用下相对机壳1上升(如图2所示),同时,控制组件控制第二抽吸通道72打开,以经由后水刮61对地面进行清洁,通过第二抽吸通道72来吸取赃物,在此情况下,上述第一抽吸通道71是关闭状态,也就是,第一抽吸通道71和第二抽吸通道72也是交替工作的。
35.上述控制组件具体在接收到第二转向信息后,控制组件可停止向升降机构51供电,使升降机构51与前水刮52之间不具备吸附力,从而使前水刮52能够相对机壳1下降,同时,控制组件控制第一抽吸通道71打开,以及使第二抽吸通道72关闭,以经由前水刮52对地面进行清洁,通过第一抽吸通道71来吸取赃物。
36.具体地,上述后水刮61可设于机壳1内,前水刮52可设于机壳1上,前水刮52上升于机壳1上时,前水刮52的下端可与地面之间形成有间隔,以使赃物能够由该间隔进入机壳1内,并被第二抽吸通道72吸取。
37.具体地,上述电控阀可在控制组件的控制下,使第一抽吸通道71打开以吸取赃物,或使第二抽吸通道72打开以吸取赃物,第一抽吸通道71和第二抽吸通道72随滚刷2的转向信息择一开启,即根据转向信息是表征滚刷2是向前还是向后滚动,来控制第一抽吸通道71或第二抽吸通道72中的一个开启。
38.本实用新型通过控制组件对吸尘组件7的第一抽吸通道71和第二抽吸通道72,以及对刮水组件4的控制,实现了在向前推动地拖装置100,或向后拉动地拖装置100时,能够根据传感组件3所检测到的转向信息控制由刮水组件4的第一刮水组件5和第二刮水组件6二者中的一个来实现对地面的清洁,即滚刷2向前滚动时第二抽吸通道72打开及第一抽吸通道71关闭,使前水刮52相对机壳1上升,通过后水刮61清洁地面,滚刷2向后滚动时第一抽吸通道71打开及第二抽吸通道72关闭,使前水刮52相对机壳1下降,通过前水刮52清洁地面,达到了无论是前推还是后拉地拖装置100,地面都不会有水痕的目的,从而达到较佳的清洁效果。
39.在一些实施例中,控制组件还具体用于接收到传感组件3检测到的滚刷20向前滚动的第一转向信息,并向电控阀发送使第二抽吸通道72打开,第一抽吸通道71关闭的第一控制信息,以及向升降机构51发送使前水刮52相对机壳1上升的第二控制信息;控制组件还
用于接收到传感组件3检测到的滚刷20向后滚动的第二转向信息,并向电控阀发送使第二抽吸通道72关闭,第一抽吸通道71打开的第三控制信息,以及向升降机构51发送使前水刮52相对机壳1下降的第四控制信息。
40.在一些实施例中,升降机构51包括电磁体53和磁性体54,电磁体53设于机壳1靠近前水刮52处,磁性体54设于前水刮52上,电磁体53与控制组件电连接,用于在通电后产生与磁性体54相吸附的磁场。上述电磁体53与磁性体54之间的吸附关系随是否供应电能而发生变化,便于控制和调节。
41.在一些其他实施例中,上述电磁体53可设于前水刮52上,磁性体54可设于机壳1靠近前水刮52处,在控制组件为电磁体53通电后,能够通过电磁体53与磁性体54的吸附关系,使前水刮52向上运动以上升至机壳1即可。
42.具体地,上述前水刮52靠上一侧可设有凹槽,磁性体54或电磁体53可嵌入该凹槽内,以使前水刮52的结构紧凑。
43.在一些实施例中,如图2和图3所示,机壳1朝下的一侧设有前进污口11,前水刮52在下降时靠近前进污口11,且在上升时远离前进污口11,电磁体53靠近前进污口11设置。上述结构紧凑,且设计合理。
44.具体地,上述前水刮52在靠近前进污口11后,前水刮52的下表面能够贴合地面,且该前水刮52的下部可具有挂条,刮条可采用具有一定硬度的材质制成,例如铜板、铁板或铝板等金属板或者树脂等硬塑料板,以增加对地面的刮蹭力,从而提高清洁效果。
45.在一些实施例中,如图4和图5所示,前水刮52的上部凸设有导向柱55,导向柱55穿设于机壳1,且导向柱55穿出机壳1的一端设有止挡件56,以限制导向柱55脱出机壳1。上述导向柱55能够对前水刮52的上下运动起到导向作用,提高了前水刮52的运动稳定性。
46.图4中示出的前水刮52组件处于下降状态,图5中示出的前水刮52组件处于上升状态。
47.具体地,上述导向柱55也可采用磁性材料制成,增加电磁体53磁场所带来的吸附力,使得前水刮52能够稳定相对机壳1上升。
48.具体地,上述止挡件56可包括挡板和卡簧,该卡簧卡在导向柱55上且卡簧的下表面作用于挡板,使得挡板能够稳定套设在导向柱55外。
49.在一些实施例中,如图4和图5所示,第一刮水组件5还包括套设于导向柱55外的弹性件57,弹性件57的一端抵于机壳1的下侧,另一端抵于前水刮52,且弹性件57用于向前水刮52施加使其向背离机壳1方向运动的作用力。如此,在升降机构51与前水刮52之间的吸附力随停止为升降机构51供电而消失时,通过弹性件57的作用力以及前水刮52自身的重量能够使前水刮52顺利地相对机壳1下降。
50.具体地,上述弹性件57可构造为压缩弹簧。
51.在一些实施例中,如图1所示,传感组件3包括霍尔传感器31和感应磁铁32,霍尔传感器31设于机壳1上,感应磁铁32设于滚刷2上,霍尔传感器31和感应磁铁32相配合以检测转向信息。上述传感组件3能够准确地检测滚刷2的转向,且结构设计简单,布局合理。
52.具体地,如图1所示,上述滚刷2可包括主动轮21和从动轮,感应磁铁32可设置在滚刷2的主动轮21上。
53.在一些实施例中,电控阀构造为电磁三通阀(图中未示出),电磁三通阀的一端口
连接于抽吸源,另外两端口分别连接于第一抽吸通道71和第二抽吸通道72,电磁三通阀设于吸尘组件7上,用于控制第一抽吸通道71和第二抽吸通道72中的一个打开,另一个关闭。如此,通过控制组件对电磁三通阀的电控,可实现通过第一刮水组件5或第二刮水组件6进行清洁。
54.具体地,第一抽吸通道71经由滚刷2的前方和上方延伸至前水刮52处,第二抽吸通道72经由滚刷2的后方延伸至后水刮61处。
55.具体地,上述第一抽吸通道71可尽可能地贴合机壳1的上壳体的内表面设置,以使得机壳1内的空间合理利用起来,使得结构紧凑,布局合理。
56.本实用新型实施例还提供了一种洗地机200,如图6所示,洗地机200包括上述的地拖装置100。采用上述洗地机200的地拖装置100通过控制组件对吸尘组件7的第一抽吸通道71和第二抽吸通道72,以及对刮水组件4的控制,实现了在向前推动地拖装置100,或向后拉动地拖装置100时,能够根据传感组件3所检测到的转向信息控制由刮水组件4的第一刮水组件5和第二刮水组件6二者中的一个来实现对地面的清洁,达到了无论是前推还是后拉地拖装置100,地面都不会有水痕的目的,从而达到较佳的清洁效果。
57.在一些实施例中,洗地机200还包括与抽吸源连通的集污箱,抽吸源用于将经由第一抽吸通道71和第二抽吸通道72吸入的赃物吸向集污箱内。上述洗地机200的结构紧凑,且设计合理。
58.具体地,洗地机200可包括与地拖装置100连接的机体,集污箱设于该机体内。
59.以上实施例仅为本实用新型的示例性实施例,不用于限制本实用新型。本领域技术人员可以在本实用新型的实质和保护范围内,对本实用新型做出各种修改或等同替换,这种修改或等同替换也应视为落在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1