清洁机器人用充电基站的制作方法
1.本实用新型涉及一种充电设备,尤其涉及一种清洁机器人用充电基站。
背景技术:
2.现有的清洁机器人功能多样,例如可以吸尘,洗地及拖地等,其主要通过在清洁机器人内部设置集尘盒用于收集灰尘,以及设置水箱用于洗地及拖地。现有的清洁机器人一般都配有一充电基站(充电桩),充电基站与家用电插座电连接。当清洁机器人内置的电池电量将要耗尽后,清洁机器人在控制系统的控制下会自动返回充电基站,并与充电基站的充电接头对接,使得基站直接对清洁机器人内部的电芯进行充电。然而,这种充电方式在充电时会使清洁机器人长时间停留在充电基站上,这时如有临时或紧急清洁需要时,清洁机器人便无法执行清洁。另外,当一个清洁机器人具有多块备用电芯时,现有的充电基站只能对安装于清洁机器人内部的电芯充电,无法对单独拆卸出来的电芯充电,因此,对于有多块备用电芯来说,充电不方便。
技术实现要素:
3.本实用新型的目的在于提供一种清洁机器人用充电基站,其既可以对清洁机器人直接连接充电,又可以对从清洁机器人拆卸出来的电芯进行充电,充电方便快捷。
4.为了实现上述目的,本实用新型提供的清洁机器人用充电基站包括壳体、充电接头、电池插座、控制电路组件及电源装置,所述充电接头设置于所述壳体的一侧并与所述控制电路组件电连接,用于与清洁机器人的充电口对接并对所述清洁机器人充电;所述壳体内具有上端开口的腔体,所述壳体内设有电池套,所述电池套用于容置从清洁机器人内拆卸出的电芯;所述电池插座设置于所述腔体内并可与所述电芯电连接;所述电池插座与所述控制电路组件电连接;所述控制电路组件设置于所述壳体内且与所述电源装置电连接,所述电源装置设置于所述壳体的一侧。
5.与现有技术相比,由于本实用新型通过在所述壳体的一侧设置充电接头,又在所述腔体内部设置电池插座,并在所述壳体内设置电池套,使所述充电接头与所述电池插座电连接于控制电路组件上,因此,利用所述充电接头,可以使清洁机器人能直接与充电基站对接,从而使得充电基站能直接对清洁机器人内部的电芯进行充电;又可以将拆卸出来的电芯放置于所述电池套内并与所述电池插座电连接,从而使得充电基站能对电芯充电;这样本实用新型充电基站其既可以对清洁机器人直接连接充电,又可以对从清洁机器人拆卸出来的电芯进行充电,使得充电十分方便,进而使得清洁机器人在任何时候都能执行清洁任务。
6.较佳地,还包括盖体,所述盖体设置于所述壳体的上端且可盖合于所述开口。设置所述盖体,可以在不对电芯进行充电时或在充电时盖合于所述开口,防止外部杂质进入到所述电池套内影响充电,保证充电的稳定性。
7.具体地,所述盖体与所述壳体之间设有铰链,以使所述盖体相对所述壳体可翻转
而打开或关闭。通过铰链将所述盖体与所述壳体连接,使得所述盖体打开或关闭更加方便、快捷。
8.较佳地,还包括电池底座,所述电池底座设置于所述腔体内,用于定位所述电芯,所述电池插座设置于电池底座内。设置所述电池底座,可以使所述电芯能快速、准确地与所述电池插座对位并连接,从而保证充电的稳定性。
9.具体地,还包括电池支架,所述电池支架设置于所述腔体内。所述电池底座及所述电池插座设置于所述电池支架上。利用电池支架可以支撑所述电池底座、电池插座以及电芯,保证结构的稳定。
10.具体地,还包括底座支架,所述底座支架设置于所述腔体的内底部,所述电池支架及所述控制电路组件设置于所述底座支架上。
11.具体地,所述控制电路组件包括控制主板及与所述控制主板电连接的限流模块,所述控制主板竖向地设置于所述底座支架上,所述限流模块设置于所述底座支架上且位于所述电池支架的下方。
12.较佳地,还包括电池上座,所述电池底座设置于所述腔体靠近所述开口的一端,用于定位所述电芯。设置所述电池上座,可以使所述电芯能快速、准确地定位于所述电池套内,防止电芯在所述电池套内发生抖动,从而保证充电的稳定性。
13.较佳地,还包括散热风扇,所述壳体的一侧设有使所述腔体连通外部的散热口,所述散热风扇设置于所述散热口并与所述控制电路组件电连接。由于充电时电芯、以及各个用电元件会发热,设置所述散热风扇可以在充电时降低所述壳体内部的温度,保证控制电路组件正常运行,并且可以对电芯及时降温,防止电芯散热不及时而发生自燃,从而提高使用的安全性。
14.较佳地,所述充电接头包括充电针、针座、对接座及固定座,所述固定座固定于所述壳体,所述对接座设置于所述固定座上,所述针座设置于所述固定座与所述对接座之间,所述充电针与所述控制电路组件电连接,所述充电针设置于所述针座且一端露出于所述对接座,以与所述清洁机器人的充电口上的导电端子电接触。
附图说明
15.图1是本实用新型清洁机器人用充电基站与清洁机器人对接充电的示意图。
16.图2是本实用新型清洁机器人用充电基站的结构图。
17.图3是本实用新型清洁机器人用充电基站的内部结构图。
18.图4是本实用新型清洁机器人用充电基站的各电器元件连接的侧视图。
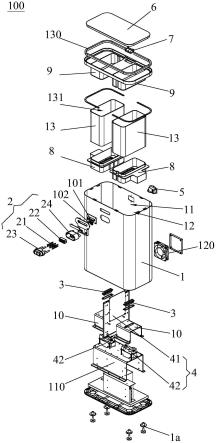
19.图5是本实用新型清洁机器人用充电基站的分解图。
具体实施方式
20.为详细说明本实用新型的技术内容、构造特征、所实现的效果,以下结合实施方式并配合附图详予说明。
21.如图1、图2及图5所示,本实用新型的清洁机器人用充电基站100包括壳体1、充电接头2、电池插座3、控制电路组件4及电源装置5,所述充电接头2设置于所述壳体1的一侧并与所述控制电路组件4电连接,用于与清洁机器人200的充电口201对接并对所述清洁机器
人200充电;所述壳体1内具有上端开口12的腔体11,所述壳体1的底部设有垫脚1a。所述壳体1内设有电池套13,所述电池套13内具有电池腔131,所述电池腔131用于容置从清洁机器人200内拆卸出的电芯202;所述电池插座3设置于所述腔体11内并可与所述电芯202电连接;所述电池插座3与所述控制电路组件4电连接;所述控制电路组件4设置于所述壳体1内且与所述电源装置5电连接,所述电源装置5设置于所述壳体1与所述充电接头2相背向的一侧。本实用新型所述电池插座3的数量为二,所述电池套13可以容纳并排的两个电池,因此,可以同时对两电芯202进行充电。
22.请再参阅图2及图5,所述清洁机器人用充电基站100还包括盖体6,所述盖体6设置于所述壳体1的上端且可盖合于所述开口12。设置所述盖体6,可以在不对电芯202进行充电时或在充电时盖合于所述开口12,防止外部杂质进入到所述电池套13内影响充电,保证充电的稳定性。所述盖体6与所述壳体1之间设有铰链7,以使所述盖体6相对所述壳体1可翻转而打开或关闭。通过铰链7将所述盖体6与所述壳体1连接,使得所述盖体6打开或关闭更加方便、快捷。
23.再如图3及图5所示,所述清洁机器人用充电基站100还包括电池底座8及电池上座9,所述电池底座8设置于所述腔体11内,用于定位所述电芯202,所述电池插座3设置于电池底座8内。所述电池底座8设置于所述腔体11靠近所述开口12的一端,用于定位所述电芯202。设置所述电池底座8及电池上座9,可以使所述电芯202能快速、准确地定位于所述电池套13内并与所述电池插座3对位连接,防止电芯202在所述电池套13内发生抖动,从而保证充电的稳定性。本实用新型所述电池底座8及电池上座9的数量均为二个,其中两所述电池上座9可以为一体连接结构。其中一电池底座8、电池上座9与一所述电池插座3组成一组,并对一个电芯202充电;另一电池底座8、电池上座9与另一所述电池插座3组成另一组,并对一个电芯202充电。
24.再如图3及图5所示,所述清洁机器人用充电基站100还包括电池支架10及底座支架110,电池支架10的数量为二,分别一一对应于所述电池底座8,所述电池支架10设置于所述腔体11内。所述电池底座8及所述电池插座3设置于所述电池支架10上。所述底座支架110设置于所述腔体11的内底部。所述电池支架10及所述控制电路组件4设置于所述底座支架110上方。利用电池支架10及所述底座支架110可以支撑所述电池底座8、电池插座3以及电芯202,保证结构的稳定。
25.请参阅图3至图5,所述控制电路组件4包括控制主板41及与所述控制主板41电连接的限流模块42,所述控制主板41竖向地设置于所述底座支架110上且位于两所述电池底座8之间。所述限流模块42设置于所述底座支架110上且位于所述电池支架10的下方,这样可以利用所述底座支架110与所述电池支架10保护所述限流模块42,保证结构的紧凑性及稳定性。
26.再请参阅图2及图5,所述充电接头2包括充电针21、针座22、对接座23及固定座24,所述固定座24固定于所述壳体1,所述对接座23设置于所述固定座24上,所述针座22设置于所述固定座24与所述对接座23之间,所述充电针21与所述控制电路组件4电连接,所述充电针21设置于所述针座22且一端露出于所述对接座23,以与所述清洁机器人200的充电口201上的导电端子电接触。另外,所述充电接头2周围还设有红外发射器101,所述红外发射器101与所述控制电路组件4电连接,其可与清洁机器人200上的红外接收器通讯,从而使得清
洁机器人200能自动寻找充电基站100的位置。并且,所述充电接头2周围还设有光电传感器102,所述光电传感器102与所述控制电路组件4电连接,以用于在清洁机器人200与充电基站100对接时检测清洁机器人200是否对接到位。
27.如图5所示,所述清洁机器人用充电基站100还包括散热风扇120,所述壳体1的一侧设有使所述腔体11连通外部的散热口,所述散热风扇120设置于所述散热口并与所述控制电路组件4电连接。由于充电时电芯202、以及各个用电元件会发热,设置所述散热风扇120可以在充电时降低所述壳体1内部的温度,保证控制电路组件4正常运行,并且可以对电芯202及时降温,防止电芯202散热不及时而发生自燃,从而提高使用的安全性。
28.请参阅图2至图4,所述清洁机器人用充电基站100还包括灯带130,所述灯带130围绕于所述壳体的上端的外侧四周,所述灯带130与所述控制电路组件4电连接。当正在充电时,所述灯带130点亮,并不充电时,所述灯带130熄灭。
29.综合上述,下面对本实用新型清洁机器人用充电基站100的工作原理进行详细描述,如下:
30.当所述清洁机器人200内的控制系统检测到电芯202的电量低于设定值时,这时,控制系统通过红外接收器检测充电基站100的位置,然后控制所述清洁机器人200移动靠近所述充电基站100并与所述充电基站100的对接,这时,所述清洁机器人200的充电口201与所述充电基站的充电接头2插接。之后,所述充电基站即可对所述清洁机器人200内的电芯202进行充电。另外,还可以将所述清洁机器人200内的电芯202拆卸出来,然后打开所述盖体6,并将所述电芯202通过所述开口12而放置于所述电池套13内,这时,所述电芯202定位于所述电池底座8上并与所述电池插座3连接,所述电池插座3上的导电针与电芯202上的导电端电接触。然后,所述控制电路组件4即可对所述电芯202进行充电。当电芯202充电完成后,可以将电芯202拆离所述充电基站,并重新安装于所述清洁机器人200内。此外,当所述充电基站对所述清洁机器人200内的电芯202进行充电时,若有备用电芯202,还可以将备用电芯202放入所述电池套13内,使所述充电基站同时对备用电芯202进行充电,进而使得所述清洁机器人200时刻都有电可用,保证任何时候都能执行清洁任务。
31.与现有技术相比,由于本实用新型通过在所述壳体1的一侧设置充电接头2,又在所述腔体11内部设置电池插座3,并在所述壳体1内设置电池套13,使所述充电接头2与所述电池插座3电连接于控制电路组件4上,因此,利用所述充电接头2,可以使清洁机器人200能直接与充电基站100对接,从而使得充电基站100能直接对清洁机器人200内部的电芯202进行充电;又可以将拆卸出来的电芯202放置于所述电池套13内并与所述电池插座3电连接,从而使得充电基站100能对电芯202充电;这样本实用新型充电基站100其既可以对清洁机器人200直接连接充电,又可以对从清洁机器人200拆卸出来的电芯202进行充电,使得充电十分方便,进而使得清洁机器人200在任何时候都能执行清洁任务。
32.本实用新型的清洁机器人用充电基站100所涉及到的清洁机器人200的结构均为本领域普通技术人员所熟知,在此不再做详细的说明。
33.以上所揭露的仅为本实用新型的较佳实例而已,当然不能以此来限定本实用新型之权利范围,因此依本实用新型申请专利范围所作的等同变化,仍属于本实用新型所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1