一种撞击防护扫地机器人的制作方法
本技术涉及扫地机器人,尤其涉及一种撞击防护扫地机器人。
背景技术:
1、扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。
2、但是现有技术中,现有的扫地机器人在使用时,由于扫地机器人的智能化侦测现场的功能差异较大,所以容易导致扫地机器人撞击到家里面的家具上面,长时间的使用中如果长期的碰撞就会导致扫地机器人的外面损坏,扫地机器人后面的散热口由于是塑料的结构,极易出现撞击后脱落损坏的情况。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,通过使用一号弹簧和防护框架可以保护在撞击后的散热口处,一定的程度上可以防止散热口损坏脱落,利用二号弹簧和弧形缓冲板可以保护扫地机器人的两侧不会受到损坏,弧形板上面的轴承和转动杆以及缓冲滚柱,可以在扫地机器人的前面撞击到家具时缓冲改变方向,这样便可以一定的程度上保护扫地机器人本体不会受损。
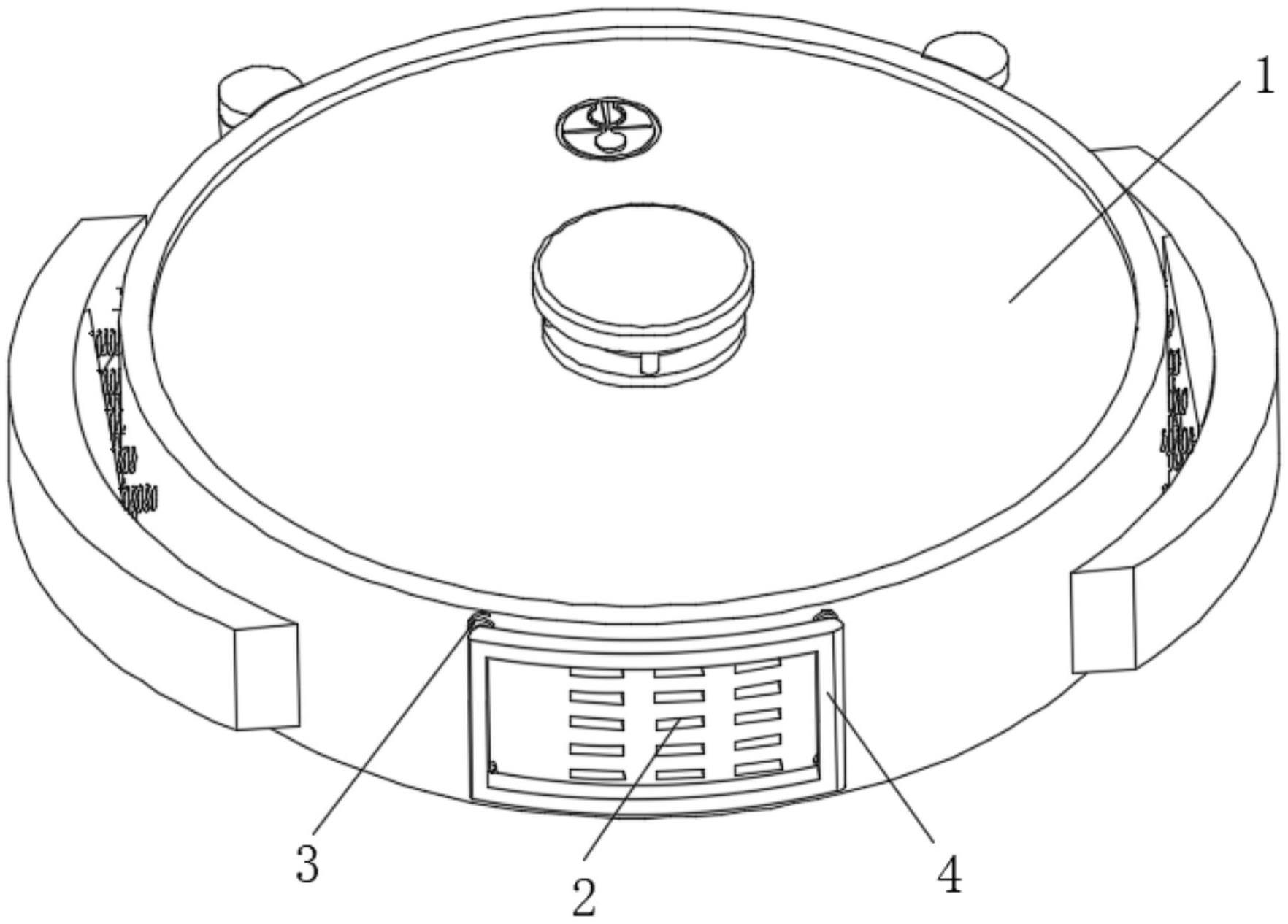
2、为了实现上述目的,本实用新型采用了如下技术方案:一种撞击防护扫地机器人,包括扫地机器人本体,所述扫地机器人本体的后表面设置有散热口,所述扫地机器人本体的后表面靠近散热口的一侧四个拐角处均设置有一号弹簧,四个所述一号弹簧的一侧之间均设置有防护框架,所述扫地机器人本体的两侧均设置有二号弹簧,所述二号弹簧设置有多个,多个所述二号弹簧设置在扫地机器人本体的两侧呈弧形等距阵列,所述扫地机器人本体的两侧均通过多个二号弹簧连接有两个弧形缓冲板,每个所述弧形缓冲板的相对一侧靠近扫地机器人本体的另两侧处均设置有橡胶柱,所述扫地机器人本体的前表面靠近防护框架的四个拐角处均设置有弧形板,四个所述弧形板的一侧均设置有轴承,四个所述弧形板的一侧均通过四个轴承连接有两个转动杆,每个所述转动杆的外表壁均设置有缓冲滚柱。
3、作为一种优选的实施方式,所述扫地机器人本体的顶部中心处设置有红外线侦测机构,所述扫地机器人本体的顶部靠近红外线侦测机构的一侧设置有控制按钮。
4、采用上述进一步方案的技术效果是:设置的红外线侦测机构可以检测家里的地形情况,设置的控制按钮可以控制装置的启动和关闭。
5、作为一种优选的实施方式,所述扫地机器人本体的底部靠近前表面处设置有万向前轮,所述扫地机器人本体的底部靠近万向前轮的两侧处均设置有圆槽。
6、采用上述进一步方案的技术效果是:设置的万向前轮便于装置的方向移动,设置的圆槽可以储存边缘刷。
7、作为一种优选的实施方式,每个所述圆槽的内部顶面均设置有边缘刷。
8、采用上述进一步方案的技术效果是:边缘刷可以将一些小的异物清理出来。
9、作为一种优选的实施方式,所述扫地机器人本体的底部中心处设置有吸尘机构。
10、采用上述进一步方案的技术效果是:设置的吸尘机构可以将异物吸入到装置的内部。
11、作为一种优选的实施方式,所述扫地机器人本体的底部靠近吸尘机构的两侧处设置有驱动轮。
12、采用上述进一步方案的技术效果是:设置的驱动轮可以让装置进行移动。
13、与现有技术相比,本实用新型的优点和积极效果在于,
14、1、本实用新型中,扫地机器人本体主要是起到了可以储存和支撑的作用,散热口便于热量的排出,一号弹簧和防护框架可以保护在撞击后的散热口处,一定的程度上可以防止散热口损坏脱落,利用二号弹簧和弧形缓冲板可以保护扫地机器人的两侧不会受到损坏,弧形板上面的轴承和转动杆以及缓冲滚柱,可以在扫地机器人的前面撞击到家具时缓冲改变方向,这样便可以一定的程度上保护扫地机器人本体不会受损,橡胶柱可以抵挡住弧形缓冲板,也有一定的缓冲作用。
15、2、本实用新型中,设置的红外线侦测机构可以检测家里的地形情况,设置的控制按钮可以控制装置的启动和关闭,设置的万向前轮便于装置的方向移动,设置的圆槽可以储存边缘刷,边缘刷可以将一些小的异物清理出来,设置的吸尘机构可以将异物吸入到装置的内部,设置的驱动轮可以让装置进行移动。
技术特征:
1.一种撞击防护扫地机器人,包括扫地机器人本体(1),其特征在于:所述扫地机器人本体(1)的后表面设置有散热口(2),所述扫地机器人本体(1)的后表面靠近散热口(2)的一侧四个拐角处均设置有一号弹簧(3),四个所述一号弹簧(3)的一侧之间均设置有防护框架(4),所述扫地机器人本体(1)的两侧均设置有二号弹簧(5),所述二号弹簧(5)设置有多个,多个所述二号弹簧(5)设置在扫地机器人本体(1)的两侧呈弧形等距阵列,所述扫地机器人本体(1)的两侧均通过多个二号弹簧(5)连接有两个弧形缓冲板(6),每个所述弧形缓冲板(6)的相对一侧靠近扫地机器人本体(1)的另两侧处均设置有橡胶柱(7),所述扫地机器人本体(1)的前表面靠近防护框架(4)的四个拐角处均设置有弧形板(8),四个所述弧形板(8)的一侧均设置有轴承(9),四个所述弧形板(8)的一侧均通过四个轴承(9)连接有两个转动杆(10),每个所述转动杆(10)的外表壁均设置有缓冲滚柱(11)。
2.根据权利要求1所述的一种撞击防护扫地机器人,其特征在于:所述扫地机器人本体(1)的顶部中心处设置有红外线侦测机构(12),所述扫地机器人本体(1)的顶部靠近红外线侦测机构(12)的一侧设置有控制按钮(13)。
3.根据权利要求1所述的一种撞击防护扫地机器人,其特征在于:所述扫地机器人本体(1)的底部靠近前表面处设置有万向前轮(14),所述扫地机器人本体(1)的底部靠近万向前轮(14)的两侧处均设置有圆槽(15)。
4.根据权利要求3所述的一种撞击防护扫地机器人,其特征在于:每个所述圆槽(15)的内部顶面均设置有边缘刷(16)。
5.根据权利要求1所述的一种撞击防护扫地机器人,其特征在于:所述扫地机器人本体(1)的底部中心处设置有吸尘机构(17)。
6.根据权利要求1所述的一种撞击防护扫地机器人,其特征在于:所述扫地机器人本体(1)的底部靠近吸尘机构(17)的两侧处设置有驱动轮(18)。
技术总结
本技术提供一种撞击防护扫地机器人,涉及扫地机器人技术领域,包括扫地机器人本体,所述扫地机器人本体的后表面设置有散热口,所述扫地机器人本体的后表面靠近散热口的一侧四个拐角处均设置有一号弹簧,四个所述一号弹簧的一侧之间均设置有防护框架。本技术,通过使用一号弹簧和防护框架可以保护在撞击后的散热口处,一定的程度上可以防止散热口损坏脱落,利用二号弹簧和弧形缓冲板可以保护扫地机器人的两侧不会受到损坏,弧形板上面的轴承和转动杆以及缓冲滚柱,可以在扫地机器人的前面撞击到家具时缓冲改变方向,这样便可以一定的程度上保护扫地机器人本体不会受损。
技术研发人员:汪结胜,张德健,胡仁美,陈小奇
受保护的技术使用者:安徽八千里科技发展有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!