清洁系统的制作方法
本发明涉及清洁机器人,特别是涉及一种清洁机器人。
背景技术:
1、随着人工智能技术的快速发展,各种智能化产品出现在人们的日常生活中。清洁机器人能够智能地、自动地帮助人们清洁地面,成为人们最常见、喜爱的家用清洁机器人产品之一。
2、一种现有的清洁机器人具有拖地功能,能够对硬质地面进行清洁,不过,该清洁机器人无法应对具有地毯等软质材料的硬质地面的清洁,例如常常会把地毯弄脏,影响了机器人的适应性。
技术实现思路
1、有鉴于此,本公开的目的之一在于提供一种能够适应地毯等软质材料进行清洁的清洁机器人,以提升清洁机器人的适应性。
2、为了实现上述目的及其它目的,本公开提供了一种清洁机器人,所述清洁机器人包括:机身;移动单元,设置于所述机身,用于支撑所述机身并带动所述清洁机器人在工作区域的表面移动;设有拖地工作头的拖地单元,所述拖地单元设置于所述机身,用于执行预设的拖地动作;所述拖地工作头包括与所述工作区域表面接触的拖地状态和与所述工作区域表面脱离接触的非拖地状态;所述拖地工作头在与工作区域表面接触的拖地工作位置和与工作区域表面脱离接触的拖地抬升位置之间可切换,当所述拖地工作头处于所述拖地状态时,所述拖地工作头处于所述拖地工作位置,当所述拖地工作头处于所述非拖地状态时,所述拖地工作头处于所述拖地抬升位置,其中拖地工作头处于所述拖地抬升位置时的抬升高度大于6mm。
3、于上述实施例中的清洁机器人中,在清洁机器人对地面清洁过程中,为应对地面上的地毯,拖地工作头的抬升高度大于6mm,可避免拖地工作头将地毯弄脏,提高了清洁机器人的适应性。
4、在其中一个实施例中,所述清洁机器人还包括:设有清扫工作头的清扫单元,所述清扫单元设置于所述机身,用于执行预设的清扫动作;所述清洁机器人被配置为至少包括清洁模式和拖地模式。
5、在其中一个实施例中,控制单元被配置为:所述清洁机器人被配置为包括扫拖一体模式。
6、在其中一个实施例中,所述抬升高度同时满足小于等于20mm。
7、在其中一个实施例中,所述拖地工作头在抬升过程中占据的空间体积为第一体积,所述清洁机器人的机身占据的空间体积为第二体积;其中,所述第一体积与第二体积的比值小于等于0.1。
8、在其中一个实施例中,所述抬升高度同时满足小于等于机身的厚度与机身底面离地高度之差。
9、在其中一个实施例中,抬升高度大于等于6.5mm。
10、在其中一个实施例中,所述拖地工作头在抬升过程中占据的空间体积为第一体积,所述清洁机器人的机身占据的空间体积为第二体积;其中,所述第一体积与第二体积的比值大于等于0.004。
11、在其中一个实施例中,抬升高度大于等于15mm。
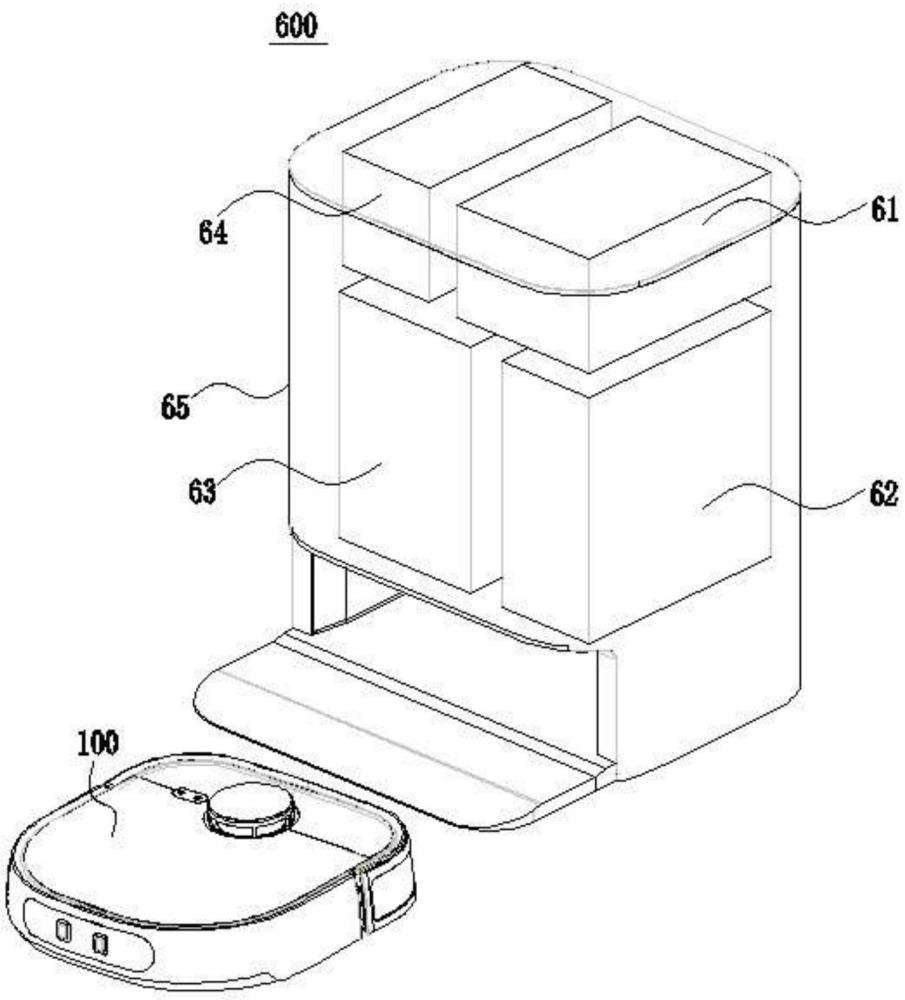
12、在其中一个实施例中,所述拖地工作头包括拖布板,用以安装擦拭件;所述拖地单元包括拖地状态切换组件,用于驱动所述拖布板沿垂直工作表面的方向升降运动。在其中一个实施例中,所述拖地工作头包括拖布板,用以安装擦拭件;所述拖地单元包括拖地状态切换组件,所述拖地状态切换组件与拖布板之间存在至少两个作用力点,拖地状态切换组件通过至少两个作用力点作用于所述拖布板上,实现将所述拖布板的抬升和下降。
13、在其中一个实施例中,所述拖地状态切换组件包括第一切换件、第二切换件,第一切换件和第二切换件连接拖布板并设置于拖布板中轴线的两侧,第一切换件和第二切换件配合以带动拖布板沿垂直工作表面的方向升降运动。
14、在其中一个实施例中,所述拖布板中轴线将拖布板分为两部分,第一切换件和第二切换件设置于拖布板中轴线l的两侧,一起带动拖布板升降。
15、在其中一个实施例中,拖地状态切换组件还包括连接件,用以带动第一切换件的至少部分和第二切换件的至少部分同时产生垂直工作表面方向的升降。
16、在其中一个实施例中,拖地状态切换组件至少部分与拖布板连接,且拖地状态切换组件至少部分与拖布板一起运动。
17、本公开还提供了一种清洁系统,包括基站(600)和清洁机器人(100),所述基站(600)用于对所述清洁机器人(100)进行维护,其中,
18、所述基站(600)包括:
19、机壳(65);
20、加液机构(61),至少部分设置于机壳(65)内部,用于为清洁机器人的水箱添加清洁液;
21、集尘机构(63),至少部分设置在机壳(65)内部,用于收集清洁机器人的尘盒内的灰尘或杂物;
22、维护机构,至少部分设置于机壳(65)内部,用于维护清洁机器人的拖地工作头;
23、控制器(64),至少部分设置于机壳(65)内部,用于控制加液机构(61)、维护机构以及集尘机构(63),以实现清洁机器人的自动维护;
24、所述清洁机器人包括:
25、机身(10);
26、移动单元(20),设置于所述机身(10),用于支撑所述机身(10)并带动所述清洁机器人(100)在工作区域的表面移动;
27、设有清扫工作头的清扫单元(30),所述清扫单元(30)设置于所述机身(10),用于执行预设的清扫动作;所述清扫工作头可选择地处于所述工作区域表面接触的清扫状态和与所述工作区域表面脱离接触的非清扫状态;
28、设有拖地工作头的拖地单元(40),所述拖地单元(40)设置于所述机身(10),用于执行预设的拖地动作,所述拖地工作头至少包括擦拭件,所述擦拭件用于对接触的工作区域表面进行拖地工作;所述拖地工作头可选择地处于与所述工作区域表面接触的拖地状态和与所述工作区域表面脱离接触的非拖地状态;所述擦拭件具有待维护状态;
29、水箱,所述水箱内装有清洁液,用以润湿清洁机器人拖地单元上的所述擦拭件,或直接润湿清洁机器人行走过的工作区域表面,以便擦拭件对工作区域表面进行清洁;所述水箱具有待加液状态;
30、尘盒,用于容纳所述清扫单元在执行预设的清扫动作的过程中搜集的灰尘或杂物;所述尘盒具有待集尘状态;
31、所述清洁机器人至少具有清扫模式和拖地模式;其中在所述清扫模式下,所述清扫工作头处于与所述工作区域表面接触的清扫状态;在所述拖地模式下,所述拖地工作头处于与所述工作区域表面接触的拖地状态;
32、控制单元(50),与清扫单元(30)和拖地单元(40)相连接;
33、所述控制单元(50)包括环境传感组件,用于识别工作区域表面的性质,使得所述控制单元能够根据工作表面的性质控制清扫单元(30)和拖地单元(30)的状态,以实现模式的自动切换;
34、所述控制单元(50)被配置为:
35、所述水箱处于待加液状态时,控制移动单元带动清洁机器人返回基站,与所述加液机构对接,以便基站自动进行清洁液补充;
36、所述擦拭件处于待维护状态时,控制移动单元带动清洁机器人返回基站,与所述维护机构对接,以便基站对所述擦拭件进行维护;
37、所述尘盒处于待集尘状态时,控制移动单元带动清洁机器人返回基站,与所述集尘机构对接,以便基站对所述尘盒进行清空。
38、在其中一个实施例中,所述维护机构包括换纸机构(62)和/或清洗机构;其中,所述换纸机构(62),至少部分设置于机壳(65)内部,用于为清洁机器人(100)的拖地单元(40)更换擦拭件;所述清洗机构,至少部分设置于壳体内部,用于清洗清洁机器人(100)的拖地单元(40)。
39、在其中一个实施例中,所述擦拭件处于待维护状态至少包括以下的一种:
40、所述擦拭件的累计工作时间达到预设时长;
41、所述擦拭件的累计工作面积达到预设面积;
42、所述擦拭件遍历了预设区域;
43、所述擦拭件上的脏污量达到预设值;
44、所述清洁机器人接收到用户的维护指令。
45、在其中一个实施例中,所述维护机构包括为清洁机器人烘干所述擦拭件的烘干机构。
46、在其中一个实施例中,所述水箱内设置有液位检测单元,用于检测所述水箱内的液体量;所述水箱内的液体量低于设定的液体量时,所述水箱处于待加液状态。
47、在其中一个实施例中,所述尘盒内设置有尘满检测单元,用于检测所述尘盒内的垃圾量,所述尘盒内的垃圾量大于阈值时,所述尘盒处于待集尘状态。
48、在其中一个实施例中,所述清洁机器人还包括供电单元,所述供电单元具有待供电状态;所述基站包括充电机构,与所述控制器相连接,用于为清洁机器人充电;所述控制单元被配置为:所述供电单元处于待供电状态时,控制移动单元带动所述清洁机器人返回基站,与所述充电机构对接,以对所述供电单元进行充电。
49、在其中一个实施例中,所述供电单元处于待供电状态至少包括以下的一种:
50、所述清洁机器人累计工作时间达到预设时长;
51、所述清洁机器人的累计清洁面积达到预设面积;
52、所述清洁机器人遍历了预设区域的工作表面;
53、所述供电单元中的电量低于预设阈值;
54、所述清洁机器人接收到用户的充电指令。
55、在其中一个实施例中,所述清扫单元至少包括滚刷工作头,所述基站还包括滚刷清理机构,与所述控制单元相连接,用于对所述滚刷工作头进行清理;所述滚刷工作头具有待清理状态;所述控制单元被配置为:所述滚刷工作头处于待清理状态时,控制所述清洁机器人返回基站,对接所述滚刷清理机构,以对所述滚刷工作头进行清理。
56、在其中一个实施例中,所述清扫单元至少包括滚刷工作头,所述清洁机器人还包括滚刷清理装置,与所述控制单元相连接,用于对所述滚刷工作头进行清理;所述滚刷工作头具有待清理状态;所述控制单元被配置为:所述滚刷工作头处于待清理状态时,控制所述滚刷清理装置对所述滚刷工作头进行清理。
57、在其中一个实施例中,所述滚刷工作头处于待清理状态至少包括以下的一种:
58、滚刷工作头的电流大于预设阈值、滚刷工作头的进尘口风量小于预设风量、滚刷工作头的进尘口压力高于预设压力、滚刷工作头清理时长达到预设值。
59、在其中一个实施例中,所述清洁机器人包括电流传感器,设置在机身上,且与控制单元相连,用于检测滚刷工作头的电流;其中电流大于阈值时,所述滚刷工作头处于待清理状态;
60、或,所述清洁机器人包括设置在机身上、且与控制单元相连的风速传感器,检测滚刷工作头进尘口的风量;其中风量小于阈值时,所述滚刷工作头处于待清理状态;
61、或,所述清洁机器人包括设置在机身上、且与控制单元相连的气压传感器,检测滚刷工作头进尘口压力;其中压力大于阈值时,滚刷工作头处于待清理状态;
62、或,所述控制单元包括计时器,统计滚刷工作头工作时长;其中滚刷工作头工作时长达到预设值时,所述滚刷工作头处于待清理状态。
63、在其中一个实施例中,所述环境传感组件包括工作面材质识别传感器,所述控制单元被配置为:通过工作面材质识别传感器自动识别工作表面材质;若所述工作表面为软质材料,控制所述清洁机器人仅执行清扫模式;若所述工作表面为硬质材料,控制所述清洁机器人执行清扫模式或拖地模式;所述清洁机器人处于拖地模式,且所述清洁机器人即将进行清扫的工作表面为软质材料时,控制所述清洁机器人将拖地模式自动切换为清扫模式。
64、在其中一个实施例中,所述清洁机器人还具有扫拖一体模式;所述清洁机器人处于所述扫拖一体模式下所述拖地工作头处于拖地状态,且所述清扫工作头处于清扫状态。
65、在其中一个实施例中,所述环境传感组件包括工作面材质识别传感器,所述控制单元被配置为:通过工作面材质识别传感器自动识别工作表面材质;若所述工作表面为软质材料,控制所述清洁机器人仅执行清扫模式;若所述工作表面为硬质材料,控制所述清洁机器人执行清扫模式或拖地模式或扫拖一体模式;若所述清洁机器人处于拖地模式,且所述清洁机器人即将进行清扫的工作表面为软质材料时,控制所述清洁机器人将拖地模式切换为清扫模式。
- 还没有人留言评论。精彩留言会获得点赞!