一种清洁机器人用内部自动化清洁装置
1.本发明涉及清洁机器人技术领域,更具体地说,本发明涉及一种清洁机器人用内部自动化清洁装置。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作,随着人们生活水平的不断提高,智能家电大大提高了人们的生活舒适性和便利性,扫地机器人是智能家电的一种,越来越多的家庭都采用扫地机器人进行清洁。
3.扫地清洁机器人在进行扫地清洁操作时需要进行灰尘及污垢杂质的吸附操作,通过吸附杂质能够对地面上的杂物进行清洁处理操作。
4.如中国专利文献申请号为:cn111493754b的本发明公开了一种扫地机器人,所述扫地机器人包括:主机、前撞基座和前撞外壳,所述前撞基座设置在所述主机的前端,所述前撞基座沿左右方向延伸,所述前撞基座上设有用于获取所述扫地机器人碰撞信号的检测装置,所述检测装置包括多个,所述前撞外壳覆盖在所述前撞基座的外部,其中所述前撞外壳相对于所述前撞基座可移动。根据本发明实施例的扫地机器人,具有较高的灵敏性,可以防止扫地机器人和被撞物体被撞坏,也可以提高扫地机器人的清洁效率和清洁效果。
5.而上述扫地机器人能够防止扫地机器人和被撞物体被撞坏,也可以提高扫地机器人的清洁效率和清洁效果,但扫地机器人不具有内部的自动清洁能力,使得在对灰尘进行吸附后,需要通过吸附管对灰尘进行吸附处理,而在吸附管管在长时间的吸附使用后,容易因吸附时的灰尘及水渍对管道的内壁造成一定的杂质粘附,日积月累容易造成管道的通道变窄,影响对灰尘的吸附能力,且在进行吸附管道的清洁时,需要进行清洁机器人的拆卸处理,大大增加清洁难度及人工的不必要劳动力,因此,研究一种清洁机器人用内部自动化清洁装置来解决上述问题具有重要意义。
技术实现要素:
6.为了克服现有技术的上述缺陷,本发明提供了一种清洁机器人用内部自动化清洁装置,本发明所要解决的技术问题是:扫地机器人不具有内部的自动清洁能力,使得在对灰尘进行吸附后,需要通过吸附管对灰尘进行吸附处理,而在吸附管管在长时间的吸附使用后,容易因吸附时的灰尘及水渍对管道的内壁造成一定的杂质粘附,日积月累容易造成管道的通道变窄,影响对灰尘的吸附能力,且在进行吸附管道的清洁时,需要进行清洁机器人的拆卸处理,大大增加清洁难度及人工的不必要劳动力。
7.为实现上述目的,本发明提供如下技术方案:一种清洁机器人用内部自动化清洁装置,包括清扫机器座、转动轮和橡胶套管,所述清扫机器座的底部设置有灰尘收集机构,所述清扫机器座的两侧外部安装有转动轮,所述清扫机器座的内部贯穿插设有橡胶套管,所述橡胶套管的一侧外部连接有清扫机构,所述灰尘收集机构的内部设置有吸附机构,所
述灰尘收集机构的内部设置有活动清洁机构,所述活动清洁机构的外部安装有清洁滚筒,所述活动清洁机构的内部设置有导向机构;所述活动清洁机构包括固定安装板、往复电机和螺纹杆,所述固定安装板固定连接在灰尘收集机构的内部外壁上,所述固定安装板的一侧外部固定连接有往复电机,所述往复电机的输出端外部固定连接有螺纹杆,所述螺纹杆的外部套设有螺纹套座,所述螺纹套座的外侧壁上固定连接有连接固定板,所述固定安装板的一侧外部固定连接有齿条板,所述螺纹杆与螺纹套座螺纹连接,所述连接固定板的外侧壁上固定安装有导向机构,所述齿条板通过螺丝固定安装在固定安装板的一侧外壁上,所述螺纹套座的一侧外部通过滑轨与固定安装板滑动连接,所述齿条板的顶端设置有齿轮条;所述导向机构包括转动齿轮、连接杆和蜗轮,所述转动齿轮转动连接在连接固定板的外部,所述转动齿轮的一侧外部固定连接有连接杆,所述连接杆的外部套设有蜗轮,所述蜗轮的底端连接有蜗杆,所述蜗杆的内部固定插设有连接转动杆。
8.作为本发明的进一步方案:所述连接转动杆的一侧外部固定连接有清洁滚筒,所述蜗轮与蜗杆啮合转动连接,所述转动齿轮啮合在齿条板的顶端,所述转动齿轮通过连接杆与蜗轮固定连接,所述连接转动杆通过转轴座在连接固定板的外部转动连接。
9.作为本发明的进一步方案:所述灰尘收集机构包括灰尘收集仓、流通管道和连接管道,所述灰尘收集仓设置在清扫机器座的内部,所述灰尘收集仓的内部安装有吸附机构,所述灰尘收集仓的一侧外部贯穿插设有流通管道,所述流通管道的外部贯穿插设有连接管道,所述连接管道插设在橡胶套管的内部,所述连接管道的内部表面设置有活动清洁机构,所述灰尘收集仓水平设置有两个。
10.作为本发明的进一步方案:所述清扫机构包括安装固定架、活动马达和清扫头,所述安装固定架固定安装在清扫机器座的底端,所述安装固定架的外部安装有活动马达,所述活动马达的输出端外部固定连接有清扫头,所述安装固定架的外部固定连接有限位扫杆。
11.作为本发明的进一步方案:所述清扫头的外表面为粗糙结构的弹性橡胶板,所述清扫头通过活动马达设置在安装固定架的内部,所述限位扫杆通过螺丝固定安装在安装固定架的内侧壁上,所述限位扫杆的外部安装有多个橡胶拨杆。
12.作为本发明的进一步方案:所述吸附机构包括套设安装座、吸附盘座、吸风叶片和转动电机,所述套设安装座安装在灰尘收集仓的内部,所述套设安装座的底端设置有吸附盘座,所述吸附盘座的顶端插设有吸风叶片,所述吸风叶片的顶端连接有转动电机。
13.作为本发明的进一步方案:所述吸风叶片固定连接在转动电机的输出端外部,所述吸风叶片在吸附盘座的内部转动连接,所述吸风叶片的外表面为螺旋状光滑塑料拨片。
14.作为本发明的进一步方案:所述清洁滚筒包括套设环、清扫拨杆和连接板座,所述套设环固定连接在连接转动杆的外部,所述套设环的外部套设有清扫拨杆,所述套设环的外侧壁上固定安装有连接板座,所述连接板座的顶端安装有限位轮,所述套设环的内部插设有导风扇叶,所述导风扇叶通过电机安装在套设环的内部,所述清扫拨杆均匀安装在套设环的外部,且清扫拨杆的外表面为粗糙结构的弹性橡胶柱,所述限位轮的内部设置有滚珠,且滚珠在限位轮的内部转动连接,所述连接板座圆周设置在套设环的外圈表面,且连接板座设置有多个。
15.本发明的有益效果在于:本发明通过设置的固定安装板、往复电机、螺纹杆和螺纹套座使得当清扫机构和吸风叶片在转动吸附时,灰尘及污渍杂质通过连接管道吸附至灰尘收集仓的内部进行收集操作,此时往复电机接通电源进行工作,带动螺纹杆进行转动,使得螺纹套座在与螺纹杆的转动限位后,能够控制螺纹套座在螺纹杆上的伸缩活动,从而使得清洁滚筒在通过导向机构与连接固定板固定连接后,能够在固定安装板的外部进行水平方向的伸缩位移调节,而清洁滚筒在连接管道的内壁进行滑动伸缩时,清扫拨杆设置在套设环的外部,能够对连接管道的内壁进行刮除清扫,且限位轮能够对连接管道的内壁进行抵合限位,增加套设环在移动清扫时的稳定性,进而当机器人在清扫工作时,通过活动清洁机构的设置能够对连接管道的内壁进行自动清洁。
16.本发明通过设置的转动齿轮、连接杆、蜗轮和蜗杆使得当螺纹套座在螺纹杆的外部进行滑动移动后,通过转动齿轮与齿条板的啮合连接,使转动齿轮能够进行转动操作,此时通过连接杆与转动齿轮的连接,带动蜗轮进行转动操作,随后通过蜗杆与蜗轮的啮合转动,带动连接转动杆进行转动,进而清洁滚筒在连接转动杆上进行固定安装后,能够对清洁滚筒进行转动操作,从而实现清洁滚筒在进行清扫时能够自转清扫,增加清扫时的效率,有效提高清扫时的效率及洁净程度。
17.本发明通过设置的安装固定架、活动马达、清扫头和限位扫杆使得当活动马达在工作后,带动清扫头进行转动,使得清扫头在转动后对地面进行清扫操作,此时清扫头转动后能够与限位扫杆进行限位操作,通过限位扫杆上的拨杆对清扫头进行限位拨弄,能够有效防止清扫头上的灰尘造成粘附,从而方便进行清扫头的自动清洁,防止因清扫头上粘附的灰尘过多影响吸附清洁时的效率。
附图说明
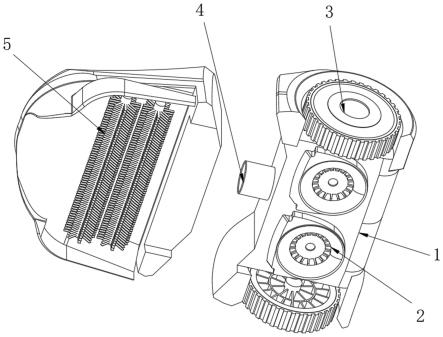
18.图1为本发明立体的结构示意图;图2为本发明图1中灰尘收集机构的结构正视示意图;图3为本发明图1中清扫机构的结构整体示意图;图4为本发明图2中吸附机构的结构整体示意图;图5为本发明图2中活动清洁机构的结构整体示意图;图6为本发明图5中清洁滚筒的结构整体示意图;图7为本发明图5中a处的结构放大示意图。
19.图中:1、清扫机器座;2、灰尘收集机构;201、灰尘收集仓;202、流通管道;203、连接管道;3、转动轮;4、橡胶套管;5、清扫机构;501、安装固定架;502、活动马达;503、清扫头;504、限位扫杆;6、吸附机构;601、套设安装座;602、吸附盘座;603、吸风叶片;604、转动电机;7、活动清洁机构;701、固定安装板;702、往复电机;703、螺纹杆;704、螺纹套座;705、齿条板;706、连接固定板;8、清洁滚筒;801、套设环;802、清扫拨杆;803、连接板座;804、限位轮;805、导风扇叶;9、导向机构;901、转动齿轮;902、连接杆;903、蜗轮;904、蜗杆;905、连接转动杆。
实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.如图1-7所示,本发明提供了一种清洁机器人用内部自动化清洁装置,包括清扫机器座1、转动轮3和橡胶套管4,清扫机器座1的底部设置有灰尘收集机构2,清扫机器座1的两侧外部安装有转动轮3,清扫机器座1的内部贯穿插设有橡胶套管4,橡胶套管4的一侧外部连接有清扫机构5,灰尘收集机构2的内部设置有吸附机构6,灰尘收集机构2的内部设置有活动清洁机构7,活动清洁机构7的外部安装有清洁滚筒8,活动清洁机构7的内部设置有导向机构9;活动清洁机构7包括固定安装板701、往复电机702和螺纹杆703,固定安装板701固定连接在灰尘收集机构2的内部外壁上,固定安装板701的一侧外部固定连接有往复电机702,往复电机702的输出端外部固定连接有螺纹杆703,螺纹杆703的外部套设有螺纹套座704,螺纹套座704的外侧壁上固定连接有连接固定板706,固定安装板701的一侧外部固定连接有齿条板705,螺纹杆703与螺纹套座704螺纹连接,连接固定板706的外侧壁上固定安装有导向机构9,齿条板705通过螺丝固定安装在固定安装板701的一侧外壁上,螺纹套座704的一侧外部通过滑轨与固定安装板701滑动连接,齿条板705的顶端设置有齿轮条;导向机构9包括转动齿轮901、连接杆902和蜗轮903,转动齿轮901转动连接在连接固定板706的外部,转动齿轮901的一侧外部固定连接有连接杆902,连接杆902的外部套设有蜗轮903,蜗轮903的底端连接有蜗杆904,蜗杆904的内部固定插设有连接转动杆905,连接转动杆905的一侧外部固定连接有清洁滚筒8,蜗轮903与蜗杆904啮合转动连接,转动齿轮901啮合在齿条板705的顶端,转动齿轮901通过连接杆902与蜗轮903固定连接,连接转动杆905通过转轴座在连接固定板706的外部转动连接,往复电机702在工作后,带动螺纹杆703进行转动,控制螺纹套座704在螺纹杆703的外部进行伸缩滑动,此时转动齿轮901在与齿条板705的啮合后,能够对转动齿轮901进行转动操作,从而通过连接杆902的连接带动蜗轮903进行转动,进而对蜗杆904进行转动操作,方便对清洁滚筒8进行移动清洁时的自转控制。
22.如图2所示,灰尘收集机构2包括灰尘收集仓201、流通管道202和连接管道203,灰尘收集仓201设置在清扫机器座1的内部,灰尘收集仓201的内部安装有吸附机构6,灰尘收集仓201的一侧外部贯穿插设有流通管道202,流通管道202的外部贯穿插设有连接管道203,连接管道203插设在橡胶套管4的内部,连接管道203的内部表面设置有活动清洁机构7,灰尘收集仓201水平设置有两个,清扫机构5包括安装固定架501、活动马达502和清扫头503,安装固定架501固定安装在清扫机器座1的底端,安装固定架501的外部安装有活动马达502,活动马达502的输出端外部固定连接有清扫头503,安装固定架501的外部固定连接有限位扫杆504,清扫头503的外表面为粗糙结构的弹性橡胶板,清扫头503通过活动马达502设置在安装固定架501的内部,限位扫杆504通过螺丝固定安装在安装固定架501的内侧壁上,限位扫杆504的外部安装有多个橡胶拨杆,清扫头503在转动清扫时通过限位扫杆504的限位,能够对清扫头503表面的灰尘进行清扫,从而防止灰尘在清扫头503表面的粘黏。
23.如图5和图7所示,吸附机构6包括套设安装座601、吸附盘座602、吸风叶片603和转动电机604,套设安装座601安装在灰尘收集仓201的内部,套设安装座601的底端设置有吸附盘座602,吸附盘座602的顶端插设有吸风叶片603,吸风叶片603的顶端连接有转动电机604,吸风叶片603固定连接在转动电机604的输出端外部,吸风叶片603在吸附盘座602的内部转动连接,吸风叶片603的外表面为螺旋状光滑塑料拨片,清洁滚筒8包括套设环801、清扫拨杆802和连接板座803,套设环801固定连接在连接转动杆905的外部,套设环801的外部套设有清扫拨杆802,套设环801的外侧壁上固定安装有连接板座803,连接板座803的顶端安装有限位轮804,套设环801的内部插设有导风扇叶805,导风扇叶805通过电机安装在套设环801的内部,清扫拨杆802均匀安装在套设环801的外部,且清扫拨杆802的外表面为粗糙结构的弹性橡胶柱,限位轮804的内部设置有滚珠,且滚珠在限位轮804的内部转动连接,连接板座803圆周设置在套设环801的外圈表面,且连接板座803设置有多个,套设环801在进行自转后,通过清扫拨杆802能够对连接管道203的内壁进行清扫处理,从而实现对连接管道203内壁的自动化清洁。
24.本发明工作原理:当清洁机器人在进行清洁操作时,首先清扫头503进行转动进行地面的清扫处理,此时清扫头503转动后能够与限位扫杆504进行限位操作,当限位扫杆504上的拨杆对清扫头503进行限位拨弄后,能够有效防止清扫头503上的灰尘造成粘附,随后清扫机构5和吸风叶片603在对灰尘进行清扫吸附时,灰尘及污渍杂质通过连接管道203吸附至灰尘收集仓201的内部进行收集操作,此时往复电机702接通电源进行工作,带动螺纹杆703进行转动,使螺纹套座704在与螺纹杆703的转动限位后,控制螺纹套座704在螺纹杆703上的伸缩活动,从而使得清洁滚筒8在通过导向机构9与连接固定板706固定连接后,能够在固定安装板701的外部进行水平方向的伸缩位移调节,清洁滚筒8在连接管道203的内壁进行滑动伸缩时,能够对连接管道203的内壁进行刮除清扫,且往复电机702在往复转动后,控制清洁滚筒8在连接管道203的内部进行往复清扫操作;进而,连接固定板706在固定安装板701的外部进行滑动伸缩时,转动齿轮901与齿条板705接触并且啮合连接,通过转动齿轮901与齿条板705的转动连接,带动转动齿轮901进行转动操作,此时通过连接杆902与转动齿轮901的固定连接,带动蜗轮903进行转动操作,而蜗杆904与蜗轮903在进行啮合传动后,带动连接转动杆905进行转动,进而清洁滚筒8在连接转动杆905上进行固定安装后,能够对连接转动杆905进行转动操作,从而清洁滚筒8在与连接转动杆905进行固定连接后,能够使清扫拨杆802在清扫时进行自转清扫,最后灰尘在流通导向后通过连接管道203在灰尘收集仓201的内部进行收集处理。
25.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其
发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1