一种触碰传感器结构及扫地机器人的制作方法
本发明涉及智能家电,特别是涉及一种触碰传感器结构及扫地机器人。
背景技术:
1、随着家庭环境中的家具种类以及数量的增多,对于扫地机器人触碰定位的能力要求也在不断提高,目前,主要的触碰定位方案是利用压电陶瓷应力形变产生信号的原理,通过在扫地机器人外壳内壁布置一定数量的触碰传感器,以解决定位分辨的问题。
2、但是目前压电陶瓷片的安装方式是直接通过硬胶将压电陶瓷片贴装在外壳内壁上,这种安装方式一方面在加工过程中,容易因按压不当导致压电陶瓷片断裂,在工作过程中,与家具撞击后也容易破碎或掉落,并且胶水粘接受环境因素影响大,尤其在温变环境和潮湿环境中,胶水质变的风险大,从而导致传感器与贴装面之间的紧配程度减弱,对触碰定位性能造成影响;
3、另一方面,在扫地机器人运行过程中,压电陶瓷片接收的信号除了扫地机器人与物体碰撞产生的信号外,还有扫地机器人自身运作产生的振动信号,诸如轮子滚动的振动信号、直流电机运行的振动信号、风机的振动信号等,各部分产生的振动信号特性不同,尤其频率特性各不相同,而这些叠加的混响信号均会被压电陶瓷片毫无保留接收,从而增加后端电路处理的难度,处理不完全的会导致误报或虚报的情况出现,对触碰定位性能造成进一步地影响。
技术实现思路
1、本发明的目的是:提供一种触碰传感器结构及扫地机器人,其不仅触碰定位的能力稳定可靠,并且能够对扫地机器人自身运作产生的振动信号进行过滤,进一步提高触碰定位的效果。
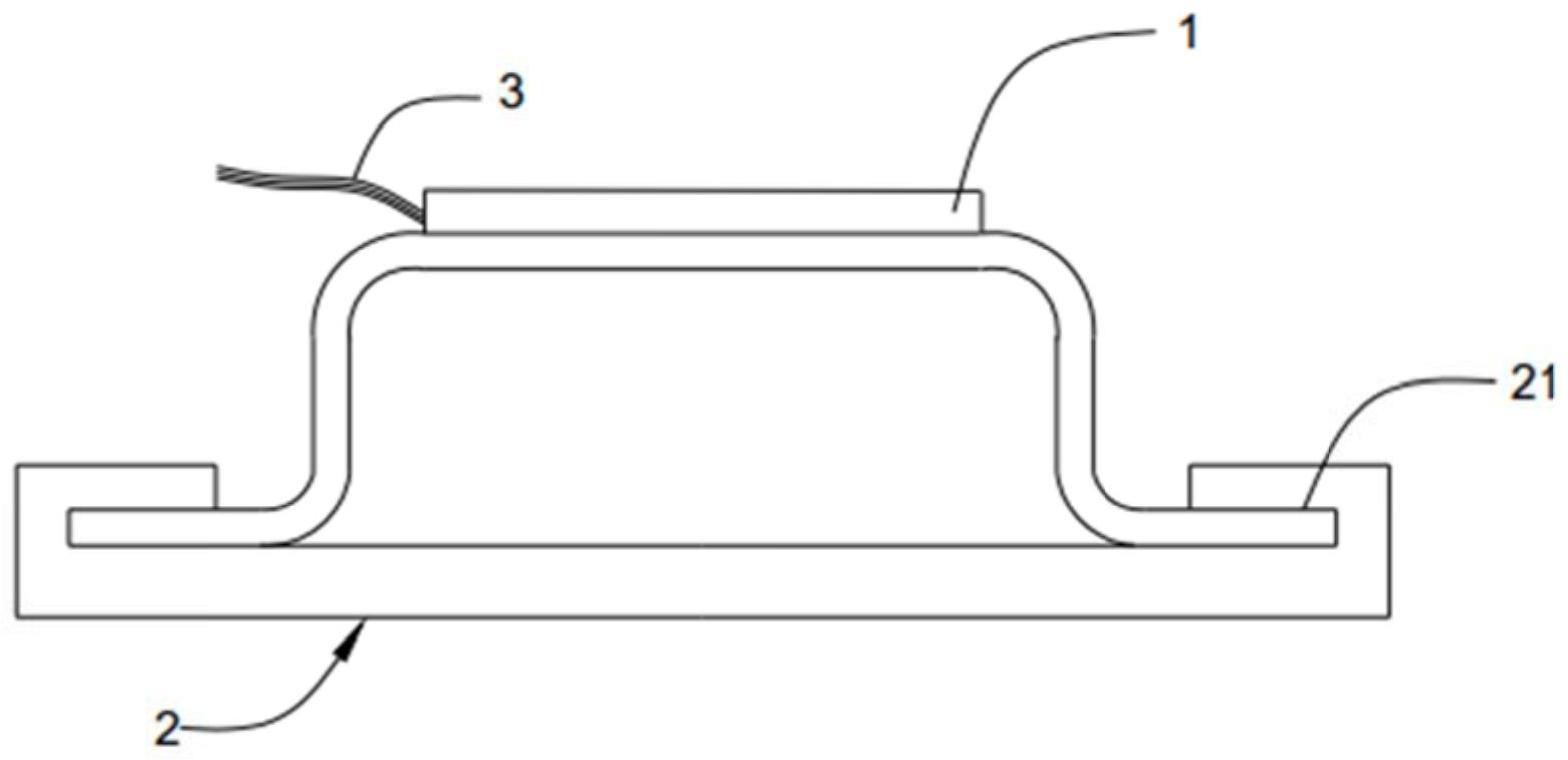
2、为了实现上述目的,本发明提供了一种触碰传感器结构,包括:支撑件和压电陶瓷片;
3、所述支撑件包括滤波部和固定部,所述滤波部包括沿第一方向延伸的第一段和沿第二方向延伸的第二段,所述第二段的一端与所述第一段的一端连接,另一端连接在所述固定部上,所述固定部沿所述第一方向延伸;
4、所述压电陶瓷片安装在所述第一段上背离所述固定部的一侧。
5、可选的,所述滤波部包括两个所述第二段,两个所述第二段分别连接于所述第一段的两端,通过设置两个所述第二段,使得所述滤波部呈拱桥状,以进一步提高滤波效果,并且两个所述第二端装在固定部上,能够使得所述压电陶瓷片安装的更加牢固,避免出现第一段晃动导致压电陶瓷片脱落的情况。
6、可选的,所述滤波部的材质为刚性材料,采用刚性材料,进一步增强滤波效果
7、可选的,所述滤波部的材质为铜或铁,采用铜或铁的刚性材料,在保证滤波效果的同时,还能保证滤波部的强度。
8、可选的,所述固定部与所述滤波部为一体成型结构,以保证所述支撑件的强度。
9、可选的,所述第一段与所述第二段弧度连接,所述第二段与所述固定部弧度连接,进一步提高对扫地机器人碰撞产生能量的缓冲。
10、可选的,所述压电陶瓷片通过胶水安装在所述第一段上,且所述压电陶瓷片贴合与所述第一段上背离所述固定部的一侧,以保证触碰定位的准确。
11、为了实现同样的目的,本发明还提供一种扫地机器人,包括:外壳、控制装置和多个如前所述的触碰传感器结构,多个所述触碰传感器结构均匀分布在所述外壳的内侧壁上,且所述固定部安装在所述外壳的内侧壁上,所述控制装置通过线束与所述压电陶瓷片电连接。
12、可选的,所述外壳的内侧壁均匀分布有多个卡槽,多个所述卡槽与多个所述触碰传感器结构一一对应,所述固定部卡接于所述卡槽,使得所述支撑件更加牢固地安装在外壳的内侧壁。
13、本发明实施例一种触碰传感器结构及扫地机器人与现有技术相比,其有益效果在于:该装置通过支撑件将压电陶瓷片安装在外壳的内侧壁,且滤波部通过第一段与第二段连接形成的悬臂梁结构,使得扫地机器人在受到碰撞产生的能量间先通过悬臂梁结构缓冲后再传递至压电陶瓷片,避免了压电陶瓷片因撞击损伤的同时,也使得压电陶瓷片能够牢固地安装在外壳的内侧壁,进而避免压电陶瓷片脱落导致的触碰定位失效,除此之外,滤波部呈悬臂梁结构,还能够起到滤波的作用,能够对扫地机器人自身运作产生的振动信号进行过滤,进一步提高触碰定位的效果。
技术特征:
1.一种触碰传感器结构,其特征在于,包括:支撑件和压电陶瓷片;
2.根据权利要求1所述的触碰传感器结构,其特征在于,所述滤波部包括两个所述第二段,两个所述第二段分别连接于所述第一段的两端。
3.根据权利要求1所述的触碰传感器结构,其特征在于,所述滤波部的材质为刚性材料。
4.根据权利要求3所述的触碰传感器结构,其特征在于,所述滤波部的材质为铜或铁。
5.根据权利要求1所述的触碰传感器结构,其特征在于,所述固定部与所述滤波部为一体成型结构。
6.根据权利要求1所述的触碰传感器结构,其特征在于,所述第一段与所述第二段弧度连接,所述第二段与所述固定部弧度连接。
7.根据权利要求1所述的触碰传感器结构,其特征在于,所述压电陶瓷片通过胶水安装在所述第一段上,且所述压电陶瓷片贴合于所述第一段上背离所述固定部的一侧。
8.一种扫地机器人,其特征在于,包括:外壳、控制装置和多个如权利要求1-7中任一项所述的触碰传感器结构,多个所述触碰传感器结构均匀分布在所述外壳的内侧壁上,且所述固定部安装在所述外壳的内侧壁上,所述控制装置通过线束与所述压电陶瓷片电连接。
9.根据权利要求8所述的扫地机器人,其特征在于,所述外壳的内侧壁均匀分布有多个卡槽,多个所述卡槽与多个所述触碰传感器结构一一对应,所述固定部卡接于所述卡槽。
技术总结
本发明涉及智能家电技术领域,公开了一种触碰传感器结构及扫地机器人,触碰传感器结构包括:支撑件和压电陶瓷片;支撑件包括滤波部和固定部,触碰传感器结构通过固定部安装在扫地机器人的外壳的内侧壁上,该装置的滤波部通过第一段与第二段连接形成的悬臂梁结构,使得扫地机器人在受到碰撞产生的能量先通过悬臂梁结构缓冲后再传递至压电陶瓷片,避免了压电陶瓷片因撞击损伤的同时,也使得压电陶瓷片能够牢固地安装在外壳的内侧壁,进而避免压电陶瓷片脱落导致的触碰定位失效,除此之外,滤波部呈悬臂梁结构,还能够起到滤波的作用,能够对扫地机器人自身运作产生的振动信号进行过滤,进一步提高触碰定位的效果。
技术研发人员:梁伟培,王森宇,翟镜皓,吴海林,冯永沛
受保护的技术使用者:广东奥迪威传感科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!