智能饮品机器人、用于饮品机器人的自动清洁模块和方法与流程
本发明涉及智能机器人领域,更具体地涉及用于制作饮品的智能饮品机器人。本发明还涉及用于智能饮品机器人的自动清洁模块和用于对智能饮品机器人进行自动清洁的方法。
背景技术:
1、随着饮品业的发展,人们对各种饮品的品质提出了更高的要求,然而饮品业的现状依然会在饮品制作的人工成本与饮品品质之间做出折中,这是因为更高品质的饮品通常意味着需要更专业的操作员以及操作员的更精细的饮品制作操作。此外,现有技术还未能实现自动制作饮品,更未能实现以自动的方式制作出高品质的各种各样的饮品。
2、因此,需要一种能够自动制作高品质的各种各样的饮品的设备,其能够在制作高品质饮品的同时大大降低人工成本,还能满足空间紧凑性要求。
技术实现思路
1、根据本发明的第一方面,提出一种智能饮品机器人,所述智能饮品机器人包括:
2、至少一个物料存储和供应室,构造为存储和供应用于制作饮品的各种物料,所述至少一个物料存储和供应室中的至少一个包括用于存储相应物料的物料桶,所述物料桶包括出料口;所述至少一个物料存储和供应室包括液料存储和供应室,所述液料存储和供应室中放置有用于盛放相应液料的、称为液料桶的物料桶;
3、液料供应机构,构造为能够将所需液料从所述液料桶供应到位于加液料工位的容器;
4、饮品订单读取接口,构造为能够读取饮品订单信息;和
5、中控机,构造为能够与所述饮品订单读取接口通信,且能够控制所述液料供应机构的启用或禁用,其中,所述中控机在启用所述液料供应机构时能够基于所读取的饮品订单信息控制所述液料供应机构将期望量的期望液料从相应的液料桶供应到位于加液料工位的容器。
6、根据本发明的各个实施例,所提出的智能饮品机器人可以进一步包括以下进一步发展中的一项或多项。
7、在一些实施例中,所述饮品订单读取接口是设置在所述中控机上的扫码枪,所述饮品订单信息封装在二维码中且包括与饮品种类关联的饮品制作信息。
8、在一些实施例中,所述智能饮品机器人还包括上位机和云服务器,其中:
9、所述饮品订单读取接口设置在所述上位机上,所述饮品订单信息封装在二维码中且包括与饮品种类关联的标识符;
10、所述云服务器存储有对应于相应饮品种类的相应的标识符和相应的饮品制作信息;
11、所述云服务器配置为能够接收饮品订单并根据与所述饮品订单关联的饮品订单信息将相应的饮品制作信息传送到所述上位机。
12、在一些实施例中,进一步地,所述上位机能够根据所述饮品制作信息命令所述中控机的相应操作。
13、在一些实施例中,所述饮品制作信息可以包括以下信息项中的至少一项:液料种类;液料量;冰量。
14、在一些实施例中,在所述加液料工位处设置有第一传感器,所述第一传感器能够感测所述容器的存在与否并能够将感测结果传送到所述中控机,其中:
15、在所述饮品订单读取接口读取了所述饮品订单信息且所述第一传感器感测到所述容器的存在的情况下,所述液料供应机构启用;
16、在所述饮品订单读取接口未读取所述饮品订单信息或所述第一传感器未感测到所述容器的存在的情况下,所述液料供应机构禁用。
17、在一些实施例中,所述液料供应机构包括:
18、称为加液料管的出料管,与各个液料桶的出料口流体连通;
19、称为加液料泵的出料泵,设置在所述加液料管上;和
20、称为加液料嘴的出料嘴,设置在所述加液料管的末端;
21、其中,所述中控机能够控制各个加液料泵的启用和禁用,并且其中:
22、在所述加液料泵启用时,液料经由相应的加液料嘴供应到所述容器;
23、在所述加液料泵禁用时,液料不能够供应到所述容器。
24、在一些实施例中,所述液料供应机构还包括设置在所述加液料泵与所述加液料嘴之间的单向阀。
25、在一些实施例中,所述液料供应机构还包括出料嘴保持板,所述出料嘴保持板构造为保持所有加液料嘴以使得所有加液料嘴能够对准位于所述加液料工位的容器。
26、在一些实施例中,所述液料存储和供应室包括用于放置所述物料桶的搁板,所述物料桶成排放置在相应搁板上。
27、在一些实施例中,每个所述搁板上设置有出料口接头,每个出料口接头的一端与所述物料桶的出料口密封连接,另一端与出料管连接。
28、在一些实施例中,所述至少一个物料存储和供应室还包括冰存储和供应室,所述冰存储和供应室中设置有出冰机构,其中,所述中控机还能够控制所述出冰机构的启用和禁用,并在启用时能够基于所读取的饮品订单信息控制所述出冰机构将期望量的冰供应到位于加冰工位的容器。
29、在一些实施例中,在所述加冰工位处设置有第二传感器,所述第二传感器能够感测所述容器的存在与否并能够将感测结果传送到所述中控机,其中:
30、在所述饮品订单读取接口读取了所述饮品订单信息且所述第二传感器感测到所述容器的存在的情况下,所述出冰机构启用;
31、在所述饮品订单读取接口未读取所述饮品订单信息或所述第二传感器未感测到所述容器的存在的情况下,所述出冰机构禁用。
32、在一些实施例中,所述出冰机构包括冰块输送组件,所述冰块输送组件包括:
33、输送机壳体,限定输送空间,并限定冰块输送出口;
34、输送驱动构件;
35、冰块输送构件,至少部分地设置在所述输送空间中,并构造为能够由所述输送驱动构件驱动以朝向所述冰块输送出口输送冰块;
36、其中,所述中控机能够控制所述输送驱动构件的启用和禁用。
37、在一些实施例中,所述智能饮品机器人还包括设置在相应容器清洗工位的容器清洗机构,每个容器清洗机构包括容器清洗喷头、容器清洗电磁阀和第三传感器,其中所述第三传感器能够感测到所述容器的存在与否并能够与相应的容器清洗电磁阀通信,以在感测到所述容器存在时打开所述容器清洗电磁阀,在未感测到所述容器时关闭所述容器清洗电磁阀。
38、在一些实施例中,在每个所述容器清洗工位处还设置有用于支撑所述容器的容器支撑件,所述容器支撑件上设置有相应的感应片,在所述容器位于所述容器支撑件上时,所述感应片下移以能够被所述第三传感器感测到。
39、在一些实施例中,所述容器清洗电磁阀配置为在打开给定持续时间后自动关闭。
40、在一些实施例中,所述容器包括容器主体和容器盖。
41、在一些实施例中,所述容器清洗机构还包括急停按钮,所述急停按钮配置为能够关闭相应的容器清洗电磁阀。
42、在一些实施例中,所述至少一个物料存储和供应室还包括奶盖奶油存储和供应室,所述奶盖奶油存储和供应室中设置有用于分别存储奶盖和奶油的、分别称为奶盖桶和奶油桶的物料桶。
43、在一些实施例中,所述智能饮品机器人还包括:
44、加奶盖机构,包括:
45、称为加奶盖管的出料管,与所述奶盖桶的出料口流体联接;
46、称为加奶盖泵的出料泵,设置在所述加奶盖管上;和
47、称为加奶盖嘴的出料嘴,设置在所述加奶盖管的末端,并设置在加奶盖工位处;和/或
48、加奶油机构,包括:
49、称为加奶油管的出料管,与所述奶油桶的出料口流体联接;
50、称为加奶油泵的出料泵,设置在所述加奶油管上;和
51、称为加奶油嘴的出料嘴,设置在所述加奶油管的末端,并设置在加奶油工位处;
52、其中,所述中控机能够控制所述加奶盖泵和加奶油泵的操作。
53、在一些实施例中,所述智能饮品机器人还包括第一用户指令接口和第二用户指令接口,其中:
54、所述第一用户指令接口能够与所述中控机通信以使所述中控机启用或禁用所述加奶盖泵;
55、所述第二用户指令接口能够与所述中控机通信以使所述中控机启用或禁用所述加奶油泵。
56、在一些实施例中,所述智能饮品机器人还包括设置在加奶盖工位处的第四传感器,所述第四传感器配置为感测位于所述加奶盖工位处的成品杯中的液位,所述成品杯为盛放所制作的饮品的杯子。
57、在一些实施例中,所述第四传感器能够与所述加奶盖泵通信,以在所述成品杯中的液位达到预定液位时使所述加奶盖泵禁用。
58、在一些实施例中,所述物料桶包括:
59、顶盖、与所述顶盖相对设置的底部和在所述顶盖与所述底部之间延伸的周壁,
60、容纳空间,由所述顶盖、所述底部和所述周壁限定,
61、清洗组件,包括清洗球和清洗驱动电机,所述清洗球在所述顶盖附近设置在所述容纳空间中,所述清洗驱动电机能够被所述中控机控制,
62、入口管,设置为与所述清洗球流体连通,以能够经由所述入口管将清洗流体输送到所述清洗球,
63、出料口,设置在所述底部中。
64、在一些实施例中,所述底部设置为朝向所述出料口渐缩,所述出料口位于所述物料桶的最底部。
65、在一些实施例中,所述顶盖上设置有加料口;所述物料桶还包括设置在所述容纳空间中、在所述底部附近的至少一个液位探针。
66、在一些实施例中,所述物料桶包括一个液位探针。
67、根据本发明的第二方面,还提出一种用于如上所述的智能饮品机器人的自动清洁模块,其中,所述自动清洁模块构造为能够自动清洗所述物料桶中的一个或多个,并包括:
68、清洗流体存储组件,设置为存储用于清洗所述物料桶的一种或多种清洗流体;
69、清洗流体输送组件,设置为能够将至少一种清洗流体输送到所述物料桶的入口管;
70、其中,所述中控机还构造为能够控制所述清洗流体输送组件的操作。
71、根据本发明的各个实施例,所述自动清洁模块还可以包括以下进一步发展中的一项或多项。
72、在一些实施例中,所述清洗流体存储组件至少包括清水桶、清洁剂桶和消毒剂桶,所述清水桶、所述清洁剂通和所述消毒剂桶设置为均能够经由进水阀与进水源流体连通。
73、在一些实施例中,所述中控机还构造为能够控制所述进水阀的操作。
74、在一些实施例中,所述清水桶、所述清洁剂通和所述消毒剂桶均设置有低液位传感器和至少一个高液位传感器。
75、在一些实施例中,所述进水阀设置为能够基于所述低液位传感器的感应信号被开启,并基于所述至少一个高液位传感器的感应信号被关闭。
76、在一些实施例中,所述清水桶、所述清洁剂通和所述消毒剂桶均设置有两个高液位传感器。
77、在一些实施例中,所述清水桶设置有用于对清水进行加热的加热装置和温度传感器,所述中控机还构造为能够控制所述加热装置的操作。
78、在一些实施例中,所述清水桶的桶壁设置有保温层。
79、在一些实施例中,所述消毒剂桶中装有能够用于食品器具消毒的消毒剂。
80、在一些实施例中,所述清洗流体输送组件包括设置在所述清水桶、所述清洁剂通和所述消毒剂桶中的每一者与每个所述物料桶之间的输送阀、泵和管,所述中控机还构造为能够控制所述输送阀和所述泵的操作。
81、在一些实施例中,所述输送阀包括用于所述清水桶、所述清洁剂通和所述消毒剂桶中的每一者的输出阀,以及用于每个所述物料桶的输入阀。
82、在一些实施例中,所述进水阀和所述输送阀均为电磁阀。
83、在一些实施例中,所述泵设置在所述清水桶、所述清洁剂通和所述消毒剂桶中的每一者的输出阀与每个所述物料桶的输入阀之间的管上。
84、在一些实施例中,所述清水桶、所述清洁剂通和所述消毒剂桶设置在可移动推车上。
85、根据本发明的又一方面,提出一种使用根据如上所述的自动清洁模块对如上所述智能饮品机器人进行自动清洁的方法,其中,所述方法包括以下步骤:
86、步骤s1:确定需要被自动清洁的待清洁物料桶;
87、步骤s2:所述中控机控制与所述待清洁物料桶相关联的出料泵,以将所述待清洁物料桶排空并在排空之后关闭出料泵;
88、步骤s3:所述中控机控制所述清洗流体输送组件工作。
89、根据本发明的各个实施例,所述方法还可以包括以下进一步发展中的一项或多项。
90、在一些实施例中,所述方法在所述步骤s3之前包括:将清洁剂和消毒剂分别放入所述清洁剂桶和所述消毒剂桶,之后所述中控机控制所述进水阀工作,以将期望量的清水依次分别注入所述清水桶、所述清洁剂通和所述消毒剂桶。
91、在一些实施例中,所述方法在所述步骤s3之前包括:所述中控机控制所述清水桶的加热装置,以将所述清水桶中的清水加热至预定温度。
92、在一些实施例中,所述方法在所述步骤s2之前包括:将所述待清洁物料桶的出料管与排水接头联接,所述排水接头通至下水管。
93、在一些实施例中,所述步骤s3包括以下操作:
94、操作o1:所述中控机将所述清水桶的输出阀打开,并将位于所述清水桶的输出阀与所述待清洁物料桶的输入阀之间的泵打开,并将所述待清洁物料桶的输入阀依次打开,以将相应的期望量清水依次注入相应待清洁物料桶中;
95、操作o2:所述中控机将注完清水的相应待清洁物料桶的输入阀关闭,并在所有待清洁物料桶注完清水之后将所述泵关闭;
96、操作o3:在预定浸泡时间段之后,所述中控机控制所述待清洁物料桶的出料泵工作,以将清水排空,之后所述中控机控制出料泵关停。
97、在一些实施例中,在所述操作o1期间,如果所述清水桶的低液位传感器给出感应信号,则:所述中控机控制所述清水桶的输送阀关闭,并控制所述清水桶的进水阀打开;在所述清水桶的高液位传感器给出感应信号时,所述中控机控制所述清水桶的进水阀关闭;并根据需要再次打开所述清水桶的输送阀。
98、在一些实施例中,在所述操作o3之后,所述方法还包括:
99、所述中控机控制所述清水桶的进水阀打开,以将所述清水桶注满清水;之后所述中控机控制所述加热装置以将所述清水桶中的清水加热到预定温度。
100、在一些实施例中,在所述操作o3之后,所述方法包括:
101、操作o4:所述中控机将所述清洁剂桶的输出阀打开,并将位于所述清洁剂桶的输出阀与所述待清洁物料桶的输入阀之间的泵打开,并将所述待清洁物料桶的输入阀依次打开,以将相应的期望量清洁剂依次注入相应待清洁物料桶中;
102、操作o5:所述中控机将注完清洁剂的相应待清洁物料桶的输入阀关闭,并在所有待清洁物料桶注完清洁剂之后将所述泵关闭;
103、操作o6:在预定浸泡时间段之后,所述中控机控制所述待清洁物料桶的出料泵工作,以将清洁剂排空,之后所述中控机控制出料泵关停。
104、在一些实施例中,所述方法还包括:在所述操作o4期间,如果所述清洁剂桶的低液位传感器给出感应信号,则所述中控机给出报错信号,以通知用户本次清洗未完成。
105、在一些实施例中,在所述操作o6之后,所述方法包括:
106、操作o7:所述中控机将所述消毒剂桶的输出阀打开,并将位于所述消毒剂桶的输出阀与所述待清洁物料桶的输入阀之间的泵打开,并将所述待清洁物料桶的输入阀依次打开,以将相应的期望量消毒剂依次注入相应待清洁物料桶中;
107、操作o8:所述中控机将注完消毒剂的相应待清洁物料桶的输入阀关闭,并在所有待清洁物料桶注完消毒剂之后将所述泵关闭。
108、操作o9:在预定浸泡时间段之后,所述中控机控制所述待清洁物料桶的出料泵工作,以将消毒剂排空,之后所述中控机控制出料泵关停。
109、在一些实施例中,所述方法还包括:在所述操作o7期间,如果所述消毒剂桶的低液位传感器给出感应信号,则所述中控机给出报错信号,以通知用户本次清洗未完成。
110、在一些实施例中,所述方法还包括将各个步骤和其中的各个操作再重复一次。
111、在一些实施例中,所述中控机控制同时工作的出料泵的数量不超过4个。
112、根据本发明的又一方面,提出一种物料桶,所述物料桶包括:
113、顶盖、与所述顶盖相对设置的底部和在所述顶盖与所述底部之间延伸的周壁;容纳空间,由所述顶盖、所述底部和所述周壁限定;清洗球,在所述顶盖附近设置在所述容纳空间中;入口管,设置为与所述清洗球流体连通,以能够经由所述入口管将清洗流体输送到所述清洗球;出料口,设置在所述底部中。
114、根据各种实施例,本发明所提出的物料桶还可以包括以下进一步发展中的一项或多项。
115、在一些实施例中,所述底部设置为朝向所述出料口渐缩,所述出料口位于所述物料桶的最底部。
116、在一些实施例中,所述清洗球为360°旋转喷射高压清洗球。
117、在一些实施例中,所述物料桶上设置有低于所述清洗球的最大液位标识部。
118、在一些实施例中,所述顶盖上设置有加料口;所述物料桶还包括设置在所述容纳空间中、在所述底部附近的至少一个液位探针。
119、在一些实施例中,所述加料口设置为靠近所述顶盖的周边。
120、在一些实施例中,所述物料桶还包括设置在所述容纳空间中的搅拌器。
121、在一些实施例中,所述物料桶包括一个液位探针,所述搅拌器的搅拌头设置为低于所述液位探针的末端。
122、在一些实施例中,所述清洗球和/或所述液位探针和/或所述搅拌器设置在所述顶盖上。
123、如图说明
124、为了更清楚地说明本公开实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本公开的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。在附图中:
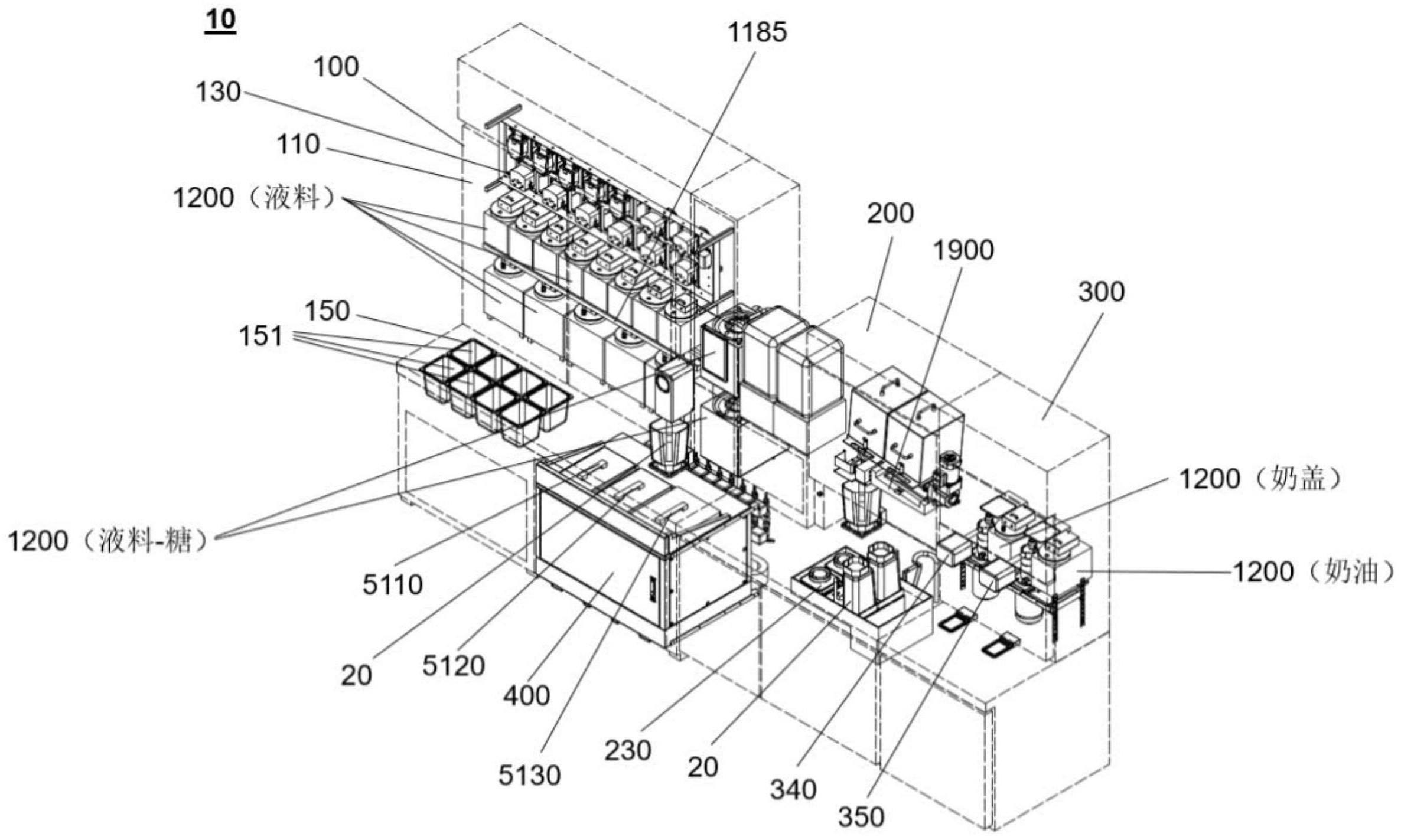
125、图1以立体示意图示出了根据示例性实施例的智能饮品机器人;
126、图2以立体示意图示出了根据示例性实施例的智能饮品机器人的内部;
127、图3是图2的智能饮品机器人的正视图;
128、图4以立体示意图示出了根据示例性实施例的智能饮品机器人的加液料模块;
129、图5以立体示意图示出了根据示例性实施例的智能饮品机器人使用的成排设置的液料桶;
130、图6以立体示意图示出了根据示例性实施例的智能饮品机器人的加液料模块的内部;
131、图7是图6所示加液料模块的侧视图;
132、图8以立体示意图示出了根据示例性实施例的智能饮品机器人的加冰模块;
133、图9以立体示意图示出了根据示例性实施例的智能饮品机器人的加冰模块的内部;
134、图10以立体示意图示出了根据示例性实施例的智能饮品机器人的加奶盖奶油模块;
135、图11以立体示意图示出了根据示例性实施例的智能饮品机器人的加奶盖奶油模块的内部;
136、图12以立体示意图示出了根据示例性实施例的出冰室的一部分和出冰机构;
137、图13以立体示意图示出了根据示例性实施例的出冰室的一部分和出冰机构的一部分,其中出冰机构的冰块储存箱被去除以示出冰块输送组件;
138、图14以立体示意图示出了根据示例性实施例的出冰机构的冰块输送构件和输送驱动构件;
139、图15以立体示意图示出了出冰机构的第一具体实施例;
140、图16以立体示意图示出了出冰机构的第二具体实施例;
141、图17以局部立体示意图示出了出冰机构的第二具体实施例;
142、图18-19分别以立体示意图示出了可用于出冰机构的第一具体实施例和第二具体实施例的主盒的闭合和打开状态;
143、图20和20a以立体示意图示出了出冰机构的第三具体实施例;
144、图21-22分别以局部立体示意图示出了出冰机构的第三具体实施例,其中辅助盒分别处于不同的状态;
145、图23以立体示意图示出了根据示例性实施例的物料桶;
146、图24和25从不同的角度以立体示意图示出了根据示例性实施例的物料桶的内部;
147、图26以立体视图示出了物料桶在相应液料室中的放置;
148、图27以立体示意图示出了清水桶、清洁剂桶和消毒剂桶;
149、图28和29以模型示意图示出了自动清洁模块的组成构件。
- 还没有人留言评论。精彩留言会获得点赞!