一种用于选矿厂的多功能智能扫地机器人及控制方法与流程
本发明属于扫地机器人,具体说是一种用于选矿厂的多功能智能扫地机器人及控制方法。
背景技术:
1、扫地机器人是用于地面清扫、除尘的工程车辆,常用于小区、景区、商场、厂房以及马路等场合的保洁工作,对于不同场合、不同场景,都有对应功能的扫地机器人,并且还可以附加配置喷雾、洗地等功能。
2、在扫地机器人不同场景应用方面,国内外学者和企业做了大量的工作,研发了包括具有清扫、吸尘、喷雾功能的多功能微型扫地车,带有雾炮的电动扫地车。这些扫地机器人都只能应用在某一特定场景下,例如小区道路的清扫、商场大厅的清扫、厂房地面的清扫等。在工厂设备巡检方面,现有的巡检机器人只能是按照固定的路线,固定的点位进行巡检,在巡检中完成在线抄表。而对于选矿厂时有发生的跑矿问题,跑矿为选矿厂现场专用词汇,是指矿浆管道发生泄漏,里面的矿浆流到地面上;目前主要依靠人工巡检和视频监控的方式,存在发现不及时的问题,特别是夜间生产时问题更突出。目前市场上的扫地机器人无法同时在进行清扫任务的同时,完成在线抄表和跑矿检测。
技术实现思路
1、本发明目的是提供一种用于选矿厂多功能智能扫地机器人,通过配置各种传感器和摄像头,基于机器视觉技术和分析模型实现应用于选矿厂的多功能智能扫地机器人,以克服传统扫地机器人不能实现矿区跑矿以及矿区设备仪表在线抄表的问题。
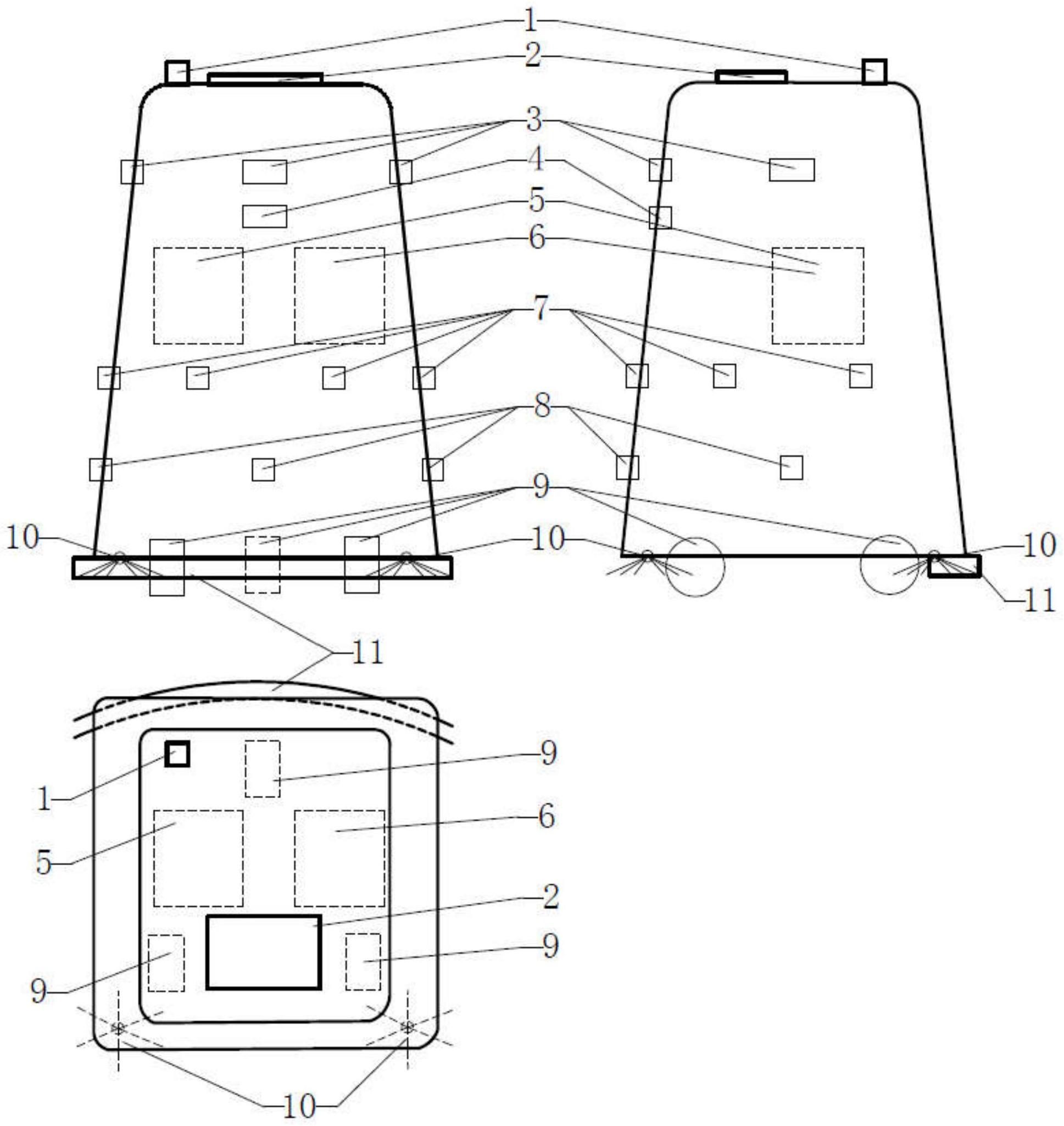
2、本发明为实现上述目的所采用的技术方案是:一种用于选矿厂的多功能智能扫地机器人,包括:4g路由器、平板电脑、摄像头、热成像工业相机、超声波雷达、激光雷达以及扫地机器人执行机构;
3、所述4g路由器设于车体正上方,与平板电脑连接,完成无线通信的功能;
4、所述摄像头设于车体上,且与平板电脑连接,用于完成扫地机器人行走时视频的采集,进而实现对矿区内现场设备上的lcd型显示仪表和指针型显示仪表的实时在线抄表以及完成地面跑矿的识别;
5、所述热成像工业相机安装于车体正前方,与平板电脑连接,用于完成扫地机器人行走时前方热成像图像的采集功能,进而完成矿区设备温度的检测;
6、所述超声波雷达设于车体上,且位置与摄像头的位置相对应;所述超声波雷达与平板电脑连接,用于完成扫地机器人行走时周围障碍物的识别;
7、所述激光雷达设于车体上,且与平板电脑连接,用于完成扫地机器人行走时周围障碍物的识别。
8、所述扫地机器人执行机构,包括:设于扫地机器人本体上的行走轮、边刷、吸扒、清水箱和污水箱;
9、所述行走轮、边刷、吸扒、清水箱和污水箱均与平板电脑连接;
10、所述行走轮设有三个,包括:两个对称设置于车体底座的正前方位置的前进行走轮和设于车体底座的正后方位置的转向行走轮;所述转向行走轮与平板电脑连接,以通过转向行走轮的转向来实现车体的转向;
11、所述边刷设有两个,分别对称设于车体底座前侧,以完成地面杂物的清扫;
12、所述清水箱和污水箱均设于车体内;所述清水箱通过出水管连通车体外部,出水管的出口设有喷淋器,喷淋器设于车体底座前侧,用于扫地机器人行走过程中从清水箱喷洒清水到地面;
13、所述清水箱和污水箱上均设有电磁阀,且电磁阀与平板电脑连接;
14、所述吸扒安装于车体底座后侧,且通过入水管与污水箱相连接,所述吸扒与水平地面相贴,用于完成地面污水的收集,吸入污水箱。
15、所述超声波雷达有六个,在车体正前方和左右两侧各设有两个,每个所述超声波雷达均与平板电脑连接;
16、所述超声波雷达的水平探测角度120°,垂直方向探测角度120°,探测距离0.1~3m。
17、所述工业相机为热成像工业相机,且工业相机的相机视场角为120°。
18、所述摄像头有三个,车体正前方和左右两侧各安装一个,均与平板电脑连接;
19、每个所述摄像头的视场角120°,以完成扫地机器人行走时三个方向视频采集的功能。
20、所述激光雷达的数量与摄像头的数量相对应,且分别设于对应摄像头同一纵轴线的车体中下部;
21、所述激光雷达的水平视场角120°,垂直视场角40°,探测距离0.3~20m。
22、一种用于选矿厂的多功能智能扫地机器人的控制方法,包括以下步骤:
23、1)利用扫地机器人安装的超声波雷达、激光雷达进行整个待清扫区域的地图建模;按照扫地机器人在待清扫区域的实际位置,将待清扫区域划分为设定数量的设备区域;新建定时清扫任务时,选择所有设备区域为清扫区域,并规划清扫路径;
24、2)开始清扫任务,通过摄像头获取视频图像,同时,超声波雷达和激光雷达分别获取超声波雷达数据和激光雷达数据,并发送至平板电脑;平板电脑根据视频图像、超声波雷达数据和激光雷达数据,扫地机器人执行相应动作;
25、3)平板电脑实时获取机器人状态数据;
26、所述状态数据,包括:扫地机器人的电量数据、清水箱清水量数据以及污水箱污水量数据;
27、3-1)当平板电脑判断剩余电量小于10%,则控制扫地机器人返回补给站充电,同时补加清水并排放污水;
28、3-2)当平板电脑判断清水量数据小于10%,则返回补给站加清水,同时对扫地机器人进行充电、排放污水;
29、3-3)当平板电脑判断污水量数据大于90%,则返回补给站排放污水,同时对清水箱补加清水、对扫地机器人进行充电;
30、4)平板电脑实时统计已经清扫过清扫区域的面积区域,并判断当前扫地机器人是否完成清扫任务,若扫地机器人完成清扫任务,则控制扫地机器人返回补给站,否则返回步骤2),继续执行清扫任务。
31、所述步骤2)中,平板电脑根据视频图像、超声波雷达数据和激光雷达数据,扫地机器人执行相应动作,具体为:
32、2-1)通过摄像头获取视频图像;平板电脑判断是否在图像中识别到仪表,若识别到仪表,则获得仪表示数;反之,若平板电脑未在图像中识别到仪表,则平板电脑判断是否在图像中识别到跑矿;
33、若平板电脑在图像中识别到矿区出现跑矿现象,则触发地面跑矿报警;若平板电脑未在图像中识别到矿区出现跑矿现象,平板电脑通过热成像工业相机获取该区域图像,进而获得温度检测数据,并根据温度检测数据与预设的跑矿状况发送的温度阈值进行对比,判断是否发生跑矿以及跑矿的发生位置,并进行触发地面跑矿报警,同时通过4g路由器发送至远程终端;
34、2-2)通过超声波雷达和激光雷达分别获取超声波雷达数据和激光雷达数据发送至平板电脑;平板电脑判断扫地机器人周围是否有障碍物,若扫地机器人周围存在障碍物,则平板电脑控制扫地机器人执行躲避动作;否则不变更任何操作。
35、所述判断是否在图像中识别到跑矿,包括以下步骤:
36、(1)扫地机器人行走中通过摄像头采集视频图像,并发送至平板电脑;
37、(2)平板电脑获取图像中所有像素点的rgb数值,循环执行步骤(3)~步骤(5);
38、(3)判断像素点r的数值是否介于(120,136)之间,是则执行步骤(4),否则返回步骤(1);
39、(4)判断像素点g的数值是否介于(60,68)之间,是则执行步骤(5),否则返回步骤(1);
40、(5)判断像素点b的数值是否介于(0,8)之间,是则执行步骤(6),否则返回步骤(1);
41、(6)平板电脑实时统计所有满足步骤(3)~步骤(5)像素点个数;当统计个数占所有像素点比例达到预设比例时,则识别到跑矿,触发地面跑矿报警。
42、所述判断是否在图像中识别到仪表,具体包括以下步骤:
43、对于识别lcd型显示仪表,具体识别方法为:
44、a.扫地机器人行走中通过摄像头采集图像,并发送至平板电脑;
45、b.平板电脑通过预先训练好的深度学习模型判断图像中是否有需要识别的lcd型显示仪表,根据深度学习模型判断仪表类型,若存在需要识别的lcd型显示仪表,则对局部需要识别的lcd型显示仪表区域图像进行透视变换,将图像校正成正投影的形式,否则返回步骤a;
46、c.对正投影形式的图像进行预处理;所述预处理,包括:图像滤波去噪、图像增强、图像二值化;
47、d.平板电脑通过ocr文字识别法对预处理后图像进行文字识别,获取到仪表示数;
48、对于指针型显示仪表,具体识别方法为:
49、a)扫地机器人行走中通过摄像头采集图像,并发送至平板电脑;
50、b)平板电脑通过预先训练好的深度学习模型判断图像中是否有需要识别的指针型显示仪表,根据深度学习模型判断仪表类型,若存在需要识别的指针型显示仪表区域图像进行透视变换,将图像校正成正投影的形式,否则返回步骤a);
51、c)对正投影形式的图像进行预处理;所述预处理,包括:图像滤波去噪、图像增强、图像二值化;
52、d)通过最小二乘法完成仪表表盘圆拟合,实现仪表刻度线质心提取;根据提取到的刻度线质心,通过ocr文字识别法完成主刻度字符提取,进而获得仪表的最小刻度示数值和最大刻度示数值以及各自在表盘的位置;
53、e)根据获取到的仪表的最小刻度示数值和最大刻度示数值以及仪表指针线,采用霍夫变换对指针型显示仪表的指针提取,获得仪表指针线,即:
54、
55、其中,d为仪表示数;min为仪表最小刻度值;max为仪表最大刻度值;o为仪表刻度线质心;α为仪表刻度线质心和最小刻度位置连线与仪表刻度线质心和最大刻度位置连线的夹角;β为仪表指针线与仪表刻度线质心和最小刻度位置连线的夹角。
56、本发明具有以下有益效果及优点:
57、1.本发明通过采集分析正前方和左右两侧视频数据,能够实现对于设备lcd型显示仪表和指针型显示仪表的实时在线抄表和数据上传功能;
58、2.本发明通过采集分析正前方和左右两侧视频数据,能够实现选矿厂地面跑矿的识别和报警;
59、3.本发明通过采集分析正前方热成像数据,能够实现对于设备温度的检测和报警。
- 还没有人留言评论。精彩留言会获得点赞!