一种智能洗菜机的模糊控制方法和系统
本发明属于家用电器领域,尤其是涉及一种智能洗菜机的模糊控制方法和系统。
背景技术:
1、随着生活水平的不断提高,人们对入口的食物关注度越来越高,瓜果蔬菜作为人们生活中必不可少的食物,在种植、采摘、运输等过程中会掺入农药、泥土等残留物,各种肉类中都附着细菌、病毒、激素等肉眼不可见的有害物,这些对人们的健康是有害的,所以要对食物进行彻底的清洗。全自动洗菜机的出现代替了手工清洗,而现有的食物清洗机在清洗过程中大都设定固定的清洗时间和清洗次数,不能像手工清洗一样根据食物的洁净程度变换清洗时间和清洗次数,会造成没洗干净或者过度清洗导致水的浪费。
技术实现思路
1、有鉴于此,本发明旨在提出一种智能洗菜机的模糊控制方法和系统,先用超声波进行清洗去除附着在食物表面的污垢、粉尘及油脂等,本次清洗用水的浑浊度值决定是否进行下一次清洗,下一次清洗时间由清洗用水的浑浊度输入清洗时间模糊控制器计算得到;然后用羟基水离子技术对食物进行深层次净化,去除细菌、病毒、农药残留及激素等有害物,其杀菌时间由食物的细菌含量输入杀菌时间模糊控制器计算得到,杀菌次数由每次杀菌之后的细菌含量决定是否进行下一次杀菌;最后进行喷淋清洗,带走附着在食物表面的残留清洗液。所述模糊控制方法能够实现像手工清洗一样根据食物的洁净程度来设定清洗时间和清洗次数,达到既能对食物进行彻底的清洁又可以节约用水用电。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、一种智能洗菜机的模糊控制方法,包括以下至少一个步骤:
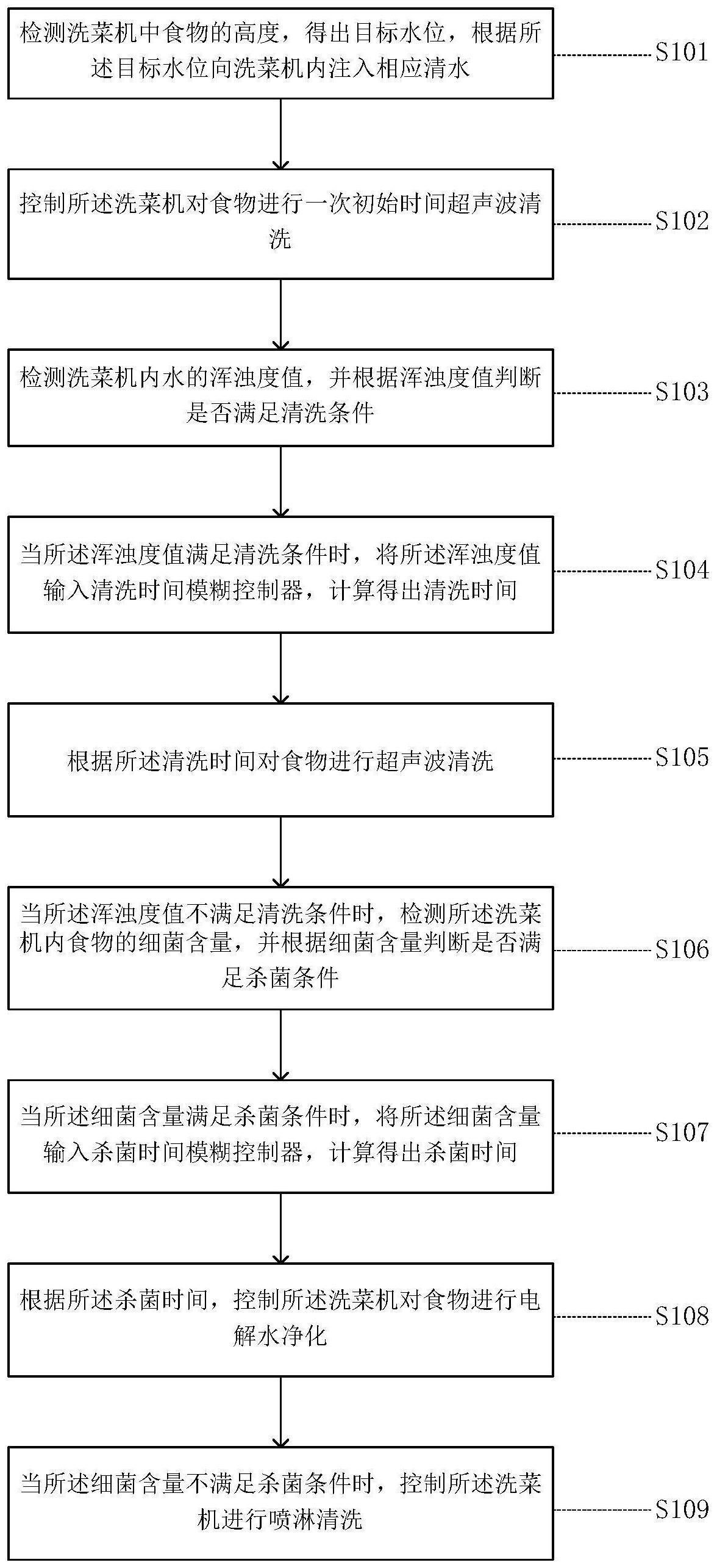
4、s1、检测洗菜机中食物的高度,得出目标水位,根据目标水位向洗菜机内注入清水至目标水位;
5、s2、控制洗菜机对食物进行一次初始时间的超声波清洗;
6、s3、在执行完步骤s2的清洗操作后,检测洗菜机内水的浑浊度值,并根据浑浊度值判断是否满足清洗条件;
7、s4、当步骤s3中的浑浊度值满足清洗条件时,将所述浑浊度值输入清洗时间模糊控制器,计算得出清洗时间;
8、s5、根据步骤s4中计算得出的清洗时间,对食物进行超声波清洗;
9、s6、当步骤s3中的浑浊度值不满足清洗条件时,检测所述洗菜机内食物的细菌含量,并根据细菌含量判断是否满足杀菌条件;
10、s7、当所述细菌含量满足步骤s6中的杀菌条件时,将所述细菌含量输入杀菌时间模糊控制器,计算得出杀菌时间;
11、s8、根据步骤s7计算得出的杀菌时间,控制洗菜机对食物进行电解水净化;
12、s9、当细菌含量不满足步骤s6中的杀菌条件时,控制洗菜机进行喷淋清洗。
13、进一步的,在步骤s3、s4、s6中的清洗条件包括:浑浊度值大于或等于预设浑浊度值阈值。
14、进一步的,在步骤s4中,清洗时间模糊控制器的控制逻辑为:
15、①选定输入输出变量的论域和模糊集合:预设浑浊度值模糊集合和清洗时间的模糊集合,定义浑浊度值和清洗时间的论域;
16、②设定隶属度函数:根据所述浑浊度值的模糊集合设定浑浊度隶属度函数,根据所述清洗时间的模糊集合设定清洗时间隶属度函数;
17、③模糊化:对输入的所述浑浊度值进行处理以变成模糊控制器要求的输入量,对处理后的输入量进行尺度变换到其论域范围,将已经变换到论域范围的输入量进行模糊处理,使原先精确的输入量变成模糊量,并用相应的浑浊度值模糊集合来表示;
18、④设置模糊规则库:根据所述浑浊度隶属度函数和清洗时间隶属度函数设置对应的模糊规则库;
19、⑤解模糊:根据所述模糊规则库进行模糊推理计算得出对应的清洗时间模糊规则可信度值,将所述清洗时间模糊规则可信度值进行解模糊得到清洗时间。
20、进一步的,在步骤s5中,还包括如下操作:先排出清洗用水,再根据所述目标水位向洗菜机内注入相应清水。
21、进一步的,在步骤s5后,还包括如下操作:重复执行步骤s3、s4和s5,直至浑浊度值不满足清洗条件时排出清洗用水,执行步骤s6。
22、进一步的,在步骤s3、s4、s6中的杀菌条件包括:细菌含量大于或等于预设细菌含量阈值。
23、进一步的,在步骤s7中,杀菌时间模糊控制器的控制方法包括:
24、将所述细菌含量输入杀菌时间模糊控制器,经过选定输入输出变量的论域和模糊集合、设定隶属度函数、模糊化、设置模糊规则库和解模糊环节,推理得出杀菌时间。
25、进一步的,在步骤s8中,还包括下述操作:先根据所述目标水位向洗菜机内注入相应清水,然后根据所述杀菌时间控制所述洗菜机对食物进行电解水净化,净化完成之后排出杀菌用水。
26、进一步的,在步骤s8后,还包括下述操作:重复步骤s6、s7和s8,直至所述细菌含量不满足杀菌条件,执行步骤s9。
27、一种智能洗菜机的模糊控制系统,包括检测装置、控制单元、模糊控制器、超声波发生器、羟基水离子发生器、喷淋装置;
28、所述检测装置包括:
29、高度传感器,用于测量所述洗菜机中食物的高度和水的液位;
30、浑浊度检测装置,用于检测所述清洗用水的浑浊度;
31、细菌含量检测装置,用于检测所述洗菜机中食物细菌的含量;
32、所述控制单元,用于执行所述智能洗菜机模糊控制方法的步骤;
33、所述模糊控制器,用于根据所述浑浊度检测装置所测浑浊度值进行模糊推理计算得出清洗时间,根据所述细菌含量检测装置所测洗菜机内食物的细菌含量进行模糊推理计算得出杀菌时间;
34、所述超声波发生器,用于产生超声波,对所述洗菜机中的食物进行超声波清洗;
35、所述羟基水离子发生器,用于通电后把水分解成氢离子和羟基自由基,对所述洗菜机中的食物进行杀菌消毒;
36、所述喷淋装置,用于产生自下而上喷涌而出的水,对所述洗菜机中的食物进行上下喷淋,带走附着在食物表面的残留清洗液。
37、相对于现有技术,本发明所述的一种智能洗菜机的模糊控制方法和系统具有以下有益效果:
38、本发明提供的一种智能洗菜机的模糊控制方法和系统,先用超声波进行清洗去除附着在食物表面的污垢、粉尘及油脂等,本次清洗用水的浑浊度值决定是否进行下一次清洗,下一次清洗时间由清洗用水的浑浊度输入清洗时间模糊控制器计算得到;然后用羟基水离子技术对食物进行深层次净化,去除细菌、病毒、农药残留及激素等有害物,其杀菌时间由食物的细菌含量输入杀菌时间模糊控制器计算得到,杀菌次数由每次杀菌之后的细菌含量决定是否进行下一次杀菌;最后进行喷淋清洗,带走附着在食物表面的残留清洗液。所述模糊控制方法能够实现像手工清洗一样根据食物的洁净程度来设定清洗时间和清洗次数,达到既能对食物进行彻底的清洁又可以节约用水用电。
技术特征:
1.一种智能洗菜机的模糊控制方法,其特征在于,包括以下至少一个步骤:
2.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于:在步骤s3、s4、s6中的清洗条件包括:浑浊度值大于或等于预设浑浊度值阈值。
3.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于,在步骤s4中,清洗时间模糊控制器的控制逻辑为:
4.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于,在步骤s5中,还包括如下操作:先排出清洗用水,再根据所述目标水位向洗菜机内注入相应清水。
5.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于,在步骤s5后,还包括如下操作:重复执行步骤s3、s4和s5,直至浑浊度值不满足清洗条件时排出清洗用水,执行步骤s6。
6.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于,在步骤s3、s4、s6中的杀菌条件包括:细菌含量大于或等于预设细菌含量阈值。
7.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于,在步骤s7中,杀菌时间模糊控制器的控制方法包括:
8.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于,在步骤s8中,还包括下述操作:先根据所述目标水位向洗菜机内注入相应清水,然后根据所述杀菌时间控制所述洗菜机对食物进行电解水净化,净化完成之后排出杀菌用水。
9.根据权利要求1所述的一种智能洗菜机的模糊控制方法,其特征在于,在步骤s8后,还包括下述操作:重复步骤s6、s7和s8,直至所述细菌含量不满足杀菌条件,执行步骤s9。
10.一种智能洗菜机的模糊控制系统,其特征在于:包括检测装置、控制单元、模糊控制器、超声波发生器、羟基水离子发生器、喷淋装置;
技术总结
本发明提供了一种智能洗菜机的模糊控制方法和系统,包括以下至少一个步骤:S1、检测洗菜机中食物的高度,得出目标水位,根据目标水位向洗菜机内注入清水至目标水位;S2、控制洗菜机对食物进行一次初始时间的超声波清洗;S3、在执行完步骤S2的清洗操作后,检测洗菜机内水的浑浊度值,并根据浑浊度值判断是否满足清洗条件;S4、当步骤S3中的浑浊度值满足清洗条件时,将所述浑浊度值输入清洗时间模糊控制器,计算得出清洗时间。本发明有益效果:能够实现像手工清洗一样根据食物的洁净程度来设定清洗时间和清洗次数,达到既能对食物进行彻底的清洁又可以节约用水用电。
技术研发人员:王世新,侯宝刚,马国文,刘仲海,魏娜,陈力,孙剑光,温艳艳
受保护的技术使用者:天津现代职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!