清洁设备的设备控制方法和装置、存储介质和电子装置与流程
本技术涉及智能家居/智慧家庭领域,具体而言,涉及一种清洁设备的设备控制方法和装置、存储介质和电子装置。
背景技术:
1、相关技术中,为了解决突发的急重病与老年人跌倒导致行动不便或昏厥的问题,可以通过服务机器人(例如,扫地机器人等)协助处理紧急事件。由于扫地机器人需要接受用户指令并根据用户指令信息进行应急处理,在某些紧急情况下,用户可能无法发出指令或者没有足够的时间触发指令,会出现用户无法得到紧急援助的情况,进而降低扫地机器人进行援助的可靠性。
2、由此可见,相关技术中的清洁设备的设备控制方法,存在由于清洁设备需要通过用户指令进行触发导致清洁设备进行援助的可靠性低的问题。
技术实现思路
1、本技术实施例提供了一种清洁设备的设备控制方法和装置、存储介质和电子装置,以至少解决相关技术中的清洁设备的设备控制方法存在由于清洁设备需要通过用户指令进行触发导致清洁设备进行援助的可靠性低的问题。
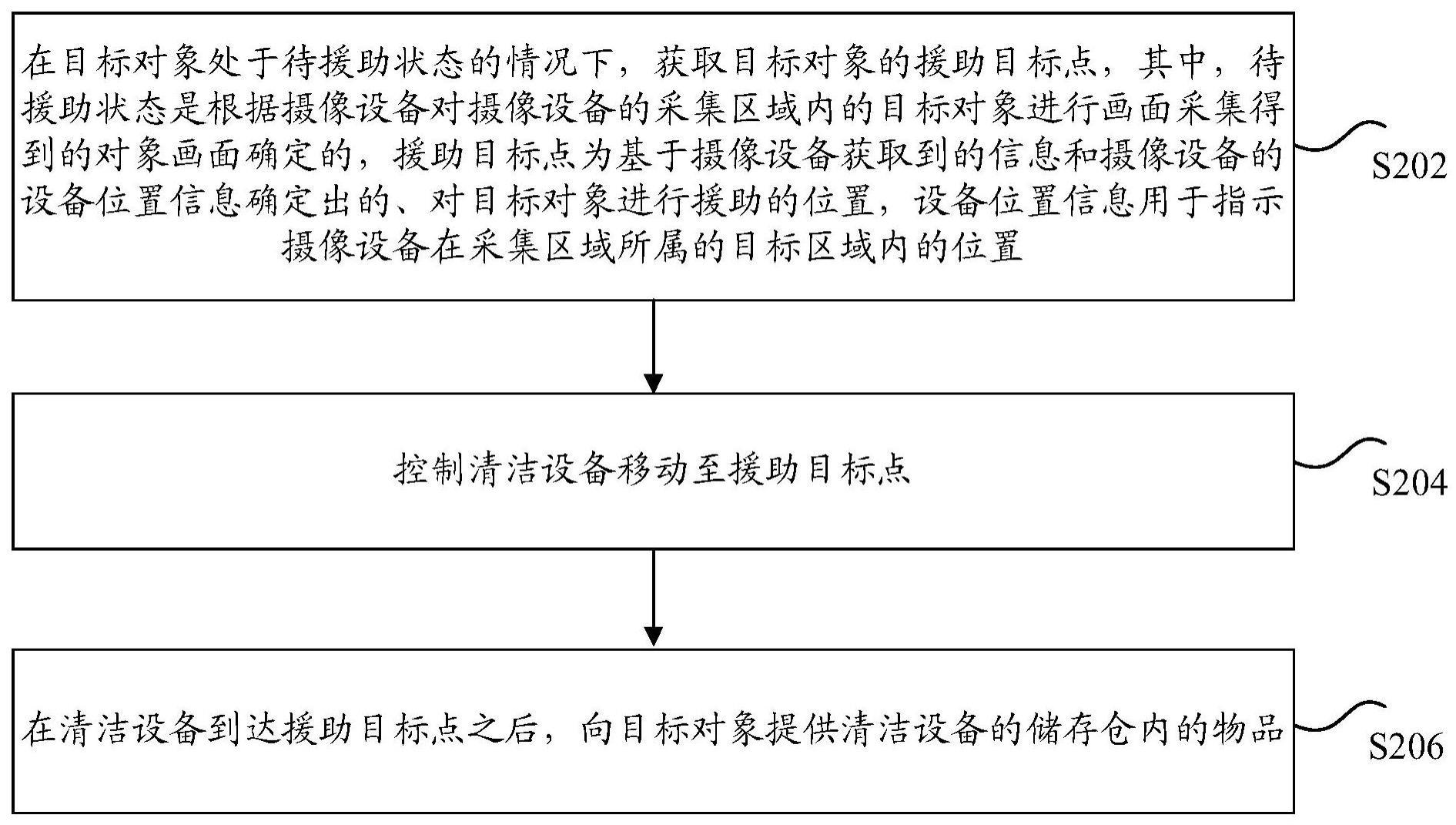
2、根据本技术实施例的一个方面,提供了一种清洁设备的设备控制方法,包括:在目标对象处于待援助状态的情况下,获取所述目标对象的援助目标点,其中,所述待援助状态是根据摄像设备对所述摄像设备的采集区域内的所述目标对象进行画面采集得到的对象画面确定的,所述援助目标点为基于所述摄像设备获取到的信息和所述摄像设备的设备位置信息确定出的、对所述目标对象进行援助的位置,所述设备位置信息用于指示所述摄像设备在所述采集区域所属的目标区域内的位置;控制所述清洁设备移动至所述援助目标点;在所述清洁设备到达所述援助目标点之后,向所述目标对象提供所述清洁设备的储存仓内的物品。
3、在一个示例性实施例中,所述方法还包括:控制所述清洁设备对所述目标区域的地面进行清洁,并通过所述清洁设备建立所述目标区域的目标区域地图;在所述目标区域地图内标注出所述设备位置信息,其中,所述设备位置信息包括以下至少之一:所述摄像设备在所述目标区域地图内的位置信息,所述摄像设备的安装角度信息,所述摄像设备的高度信息。
4、在一个示例性实施例中,所述方法还包括:对所述摄像设备采集的对象画面中的所述目标对象进行对象特征提取,得到所述目标对象的对象特征,其中,所述目标对象的对象特征用于标识所述目标对象的姿态;根据所述目标对象的对象特征,确定所述目标对象是否处于所述待援助状态,其中,所述待援助状态与指定姿态对应。
5、在一个示例性实施例中,所述根据所述目标对象的对象特征,确定所述目标对象是否处于所述待援助状态,包括:从所述目标对象的对象特征中提取所述目标对象的人体关键点,其中,所述人体关键点用于标识所述目标对象的第一指定部位;通过对所述目标对象的所述人体关键点的位置信息进行分析,确定所述目标对象所处的姿态;在所述目标对象所处的姿态为所述指定姿态、且处于所述指定姿态的时长达到第一预设时间的情况下,将所述目标对象标记为所述待援助状态。
6、在一个示例性实施例中,所述根据所述目标对象的对象特征,确定所述目标对象是否处于所述待援助状态,还包括:向所述目标对象发送援助提示信息,其中,所述援助提示信息用于确定所述目标对象是否需要援助;在第二预设时间内接收到所述目标对象返回的、用于指示所述目标对象需要援助的响应,或者在所述第二预设时间内未接收到所述目标对象返回的响应的情况下,确定所述目标对象处于所述待援助状态。
7、在一个示例性实施例中,所述在目标对象处于待援助状态的情况下,获取所述目标对象的援助目标点,包括:在所述目标对象处于所述待援助状态的情况下,基于所述摄像设备获取到的第一位置信息和所述设备位置信息,确定所述目标对象的第二位置信息,其中,所述第一位置信息用于指示所述目标对象与所述摄像设备的相对位置信息,所述第二位置信息用于指示所述目标对象在所述目标区域内的位置;基于所述第二位置信息以及所述目标对象所处的姿态的姿态参数,确定所述援助目标点,其中,所述目标对象所处的姿态的姿态参数用于表示在所述目标对象所处的姿态下,所述目标对象的第二指定部位的部位位置。
8、在一个示例性实施例中,所述方法还包括:在所述目标对象处于所述待援助状态的情况下,控制所述清洁设备进入应急模式,并控制所述清洁设备中断当前正在执行的任务;将待援助信息发送至第一指定对象和指定处理机构中的至少之一,其中,所述待援助信息用于指示所述目标对象处于所述待援助状态。
9、在一个示例性实施例中,所述方法还包括:在所述清洁设备到达所述援助目标点之后,通过所述清洁设备与所述目标对象进行语音交互;在第三预设时间内未采集到所述目标对象的语音交互数据的情况下,播放提示语音,其中,所述提示语音用于提示所述目标对象的位置。
10、根据本技术实施例的另一个方面,还提供了一种清洁设别的设备控制装置,包括:获取单元,用于在目标对象处于待援助状态的情况下,获取所述目标对象的援助目标点,其中,所述待援助状态是根据摄像设备对所述摄像设备的采集区域内的所述目标对象进行画面采集得到的对象画面确定的,所述援助目标点为基于所述摄像设备获取到的信息和所述摄像设备的设备位置信息确定出的、对所述目标对象进行援助的位置,所述设备位置信息用于指示所述摄像设备在所述采集区域所属的目标区域内的位置;控制单元,用于控制所述清洁设备移动至所述援助目标点;提供单元,用于在所述清洁设备到达所述援助目标点之后,向所述目标对象提供所述清洁设备的储存仓内的物品。
11、在一个示例性实施例中,所述装置还包括:第一执行单元,用于控制所述清洁设备对所述目标区域的地面进行清洁,并通过所述清洁设备建立所述目标区域的目标区域地图;标注单元,用于在所述目标区域地图内标注出所述设备位置信息,其中,所述设备位置信息包括以下至少之一:所述摄像设备在所述目标区域地图内的位置信息,所述摄像设备的安装角度信息,所述摄像设备的高度信息。
12、在一个示例性实施例中,所述装置还包括:提取单元,用于对所述摄像设备采集的对象画面中的所述目标对象进行对象特征提取,得到所述目标对象的对象特征,其中,所述目标对象的对象特征用于标识所述目标对象的姿态;确定单元,用于根据所述目标对象的对象特征,确定所述目标对象是否处于所述待援助状态,其中,所述待援助状态与指定姿态对应。
13、在一个示例性实施例中,所述确定单元包括:提取模块,用于从所述目标对象的对象特征中提取所述目标对象的人体关键点,其中,所述人体关键点用于标识所述目标对象的第一指定部位;第一确定模块,用于通过对所述目标对象的所述人体关键点的位置信息进行分析,确定所述目标对象所处的姿态;标记模块,用于在所述目标对象所处的姿态为所述指定姿态、且处于所述指定姿态的时长达到第一预设时间的情况下,将所述目标对象标记为所述待援助状态。
14、在一个示例性实施例中,所述确定单元还包括:发送模块,用于向所述目标对象发送援助提示信息,其中,所述援助提示信息用于确定所述目标对象是否需要援助;第二确定模块,用于在第二预设时间内接收到所述目标对象返回的、用于指示所述目标对象需要援助的响应,或者在所述第二预设时间内未接收到所述目标对象返回的响应的情况下,确定所述目标对象处于所述待援助状态。
15、在一个示例性实施例中,所述获取单元包括:第三确定模块,用于在所述目标对象处于所述待援助状态的情况下,基于所述摄像设备获取到的第一位置信息和所述设备位置信息,确定所述目标对象的第二位置信息,其中,所述第一位置信息用于指示所述目标对象与所述摄像设备的相对位置信息,所述第二位置信息用于指示所述目标对象在所述目标区域内的位置;第四确定模块,用于基于所述第二位置信息以及所述目标对象所处的姿态的姿态参数,确定所述援助目标点,其中,所述目标对象所处的姿态的姿态参数用于表示在所述目标对象所处的姿态下,所述目标对象的第二指定部位的部位位置。
16、在一个示例性实施例中,所述装置还包括:第二执行单元,用于在所述目标对象处于所述待援助状态的情况下,控制所述清洁设备进入应急模式,并控制所述清洁设备中断当前正在执行的任务;发送单元,用于将待援助信息发送至第一指定对象和指定处理机构中的至少之一,其中,所述待援助信息用于指示所述目标对象处于所述待援助状态。
17、在一个示例性实施例中,所述装置还包括:交互单元,用于在所述清洁设备到达所述援助目标点之后,通过所述清洁设备与所述目标对象进行语音交互;播放单元,用于在第三预设时间内未采集到所述目标对象的语音交互数据的情况下,播放提示语音,其中,所述提示语音用于提示所述目标对象的位置。
18、根据本技术实施例的又一方面,还提供了一种清洁设备,包括清洁设备本体;设置在所述清洁设备本体内部的储存仓,用于存储物品;存储器和处理器,所述存储器中存储有计算机程序,所述处理器被设置为通过所述计算机程序执行上述的清洁设备的设备控制方法。
19、根据本技术实施例的又一方面,还提供了一种计算机可读的存储介质,该计算机可读的存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述清洁设备的设备控制方法。
20、根据本技术实施例的又一方面,还提供了一种电子装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,上述处理器通过计算机程序执行上述的清洁设备的设备控制方法。
21、在本技术实施例中,采用通过摄像设备辅助对目标对象进行状态检测、并在检测到异常时由清洁设备主动对目标对象进行援助的方式,通过在目标对象处于待援助状态的情况下,获取目标对象的援助目标点,其中,待援助状态是根据摄像设备对摄像设备的采集区域内的目标对象进行画面采集得到的对象画面确定的,援助目标点为基于摄像设备获取到的信息和摄像设备的设备位置信息确定出的、对目标对象进行援助的位置,设备位置信息用于指示摄像设备在采集区域所属的目标区域内的位置;控制清洁设备移动至援助目标点;在清洁设备到达援助目标点之后,向目标对象提供清洁设备的储存仓内的物品,由于根据摄像设备对其采集区域内的目标对象进行画面采集得到的对象画面,可以确定目标对象是否处于特定的待援助状态,并且可以在目标对象处于待援助状态的情况下,由清洁设备主动对待援助对象进行援助,可以实现无需用户触发即可进行援助的目的,从而可以达到提高清洁设备进行援助的可靠性的技术效果,进而解决了相关技术中的清洁设备的设备控制方法存在由于清洁设备需要通过用户指令进行触发导致清洁设备进行援助的可靠性低的问题。
- 还没有人留言评论。精彩留言会获得点赞!