一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅的制作方法
本发明涉及座椅领域,尤指一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅。
背景技术:
1、腰椎病的病因表面上看千差万别,但其根源可以追溯到人类进化的原始阶段。人类从3亿年前的爬行类脊椎动物进化而来,但人类直立行走后,脊椎骨骼形态并没有多少变化,直立导致腰椎承受的压力增加4倍。而现代人的工作状态以坐位为主,坐位导致腰椎的承受压力增加6倍,所以腰椎承受的压力才是人类腰痛疾病的终极因。
2、为了使腰部舒适,缓解腰椎病,现有的腰椎病患者一般选用腰部舒适型的椅子,如中国专利公开了一种可调节腰椎部位的座椅(申请号:cn202020978024.5),包括椅背和椅座,椅背包括椅背后板与腰椎调节组件,椅背后板与椅座连接,腰椎调节组件包括底板、腰椎靠板和限位调节机构,底板前置安装在椅背后板上,且对应于腰椎部位,底板和椅背后板之间设有上下移动锁位机构,腰椎靠板呈拱形向前凸起,且上端与底板铰接,下端与底板之间通过限位调节机构连接,形成腰椎靠板相对底板的垂直摆动。通过上下移动锁位机构可以上下调节腰椎靠板的高度,通过限位调节机构可以调节腰椎靠板凸起的高度,能适应于不同人的腰椎高度和弯度,使人体背部与椅背的贴合程度更高,使倚靠在椅背上更舒适。虽然该座椅能调整脊椎到更佳的曲度,但并不能从根本上降低腰椎所承受的力,从而无法达到良好的预防及保健腰椎的效果。
3、因此,发明人致力于设计一种座椅以解决上述问题。
技术实现思路
1、为解决上述问题,本发明提供一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,以克服背景技术中出现的技术问题。
2、为实现上述目的,本发明采用的技术方案是:一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,包括座椅本体;
3、到位检测装置,该到位检测装置安装在座椅本体的椅座上,且该座椅上还安装有提醒装置;
4、夹持机械臂,用于夹持人体腋窝以下及胁肋部位,且该夹持机械臂上设置有用于检测夹持力度的夹持力度传感装置;
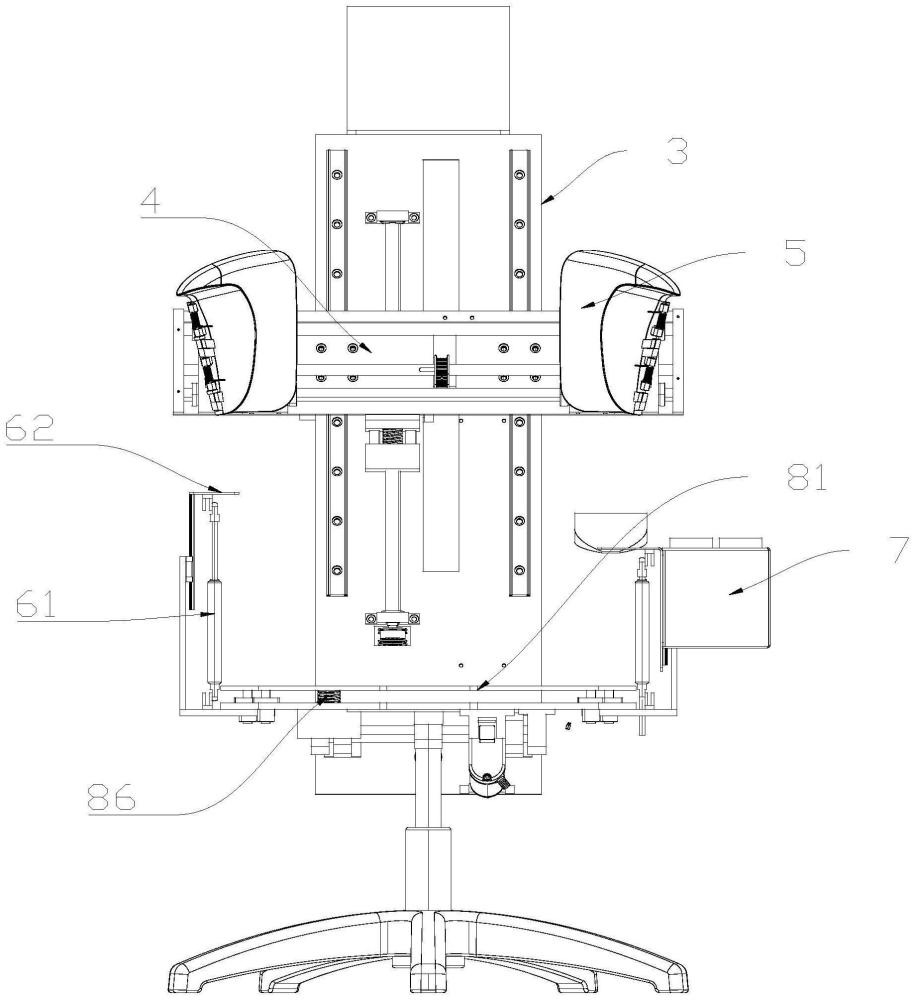
5、纵向驱动模块,该纵向驱动模块配装在座椅本体的靠背,且纵向驱动模块驱动夹持机械臂沿靠背方向上下移动;
6、纵向承托力度传感装置,配装在纵向驱动模块与纵向驱动模块的连接处;
7、扶手支撑装置,该扶手支撑装置与座椅本体的扶手驱动连接,并驱动扶手沿竖直方向移动,扶手上设置压力传感装置;
8、主控装置,到位检测装置、提醒装置、纵向驱动模块、夹持机械臂、扶手支撑装置、夹持力度传感装置、纵向承托力度传感装置均与主控装置进行数据通信连接;
9、供电装置,该供电装置分别与主控装置、到位检测装置、提醒装置、纵向驱动模块、夹持机械臂、扶手支撑装置、夹持力度传感装置、纵向承托力度传感装置连接并为其供电。
10、还包括一个主控机构、供电装置,其中到位检测装置、提醒装置、纵向驱动模块、夹持机械臂、扶手支撑装置、夹持力度传感装置、纵向承托力度传感装置均与主控芯片以及供电装置电性连接。
11、作为进一步的优化方案,纵向驱动模块包括纵向驱动电机、纵向丝杆、活动螺接在纵向丝杆上的第一丝杆螺母滑块、与丝杆螺母滑块连接的承托底板,纵向驱动电机固定在靠背上,且纵向驱动电机带动纵向丝杆旋转,并使得第一丝杆螺母滑块带动承托底板沿纵向丝杆方向移动,且承托底板带动夹持机械臂沿纵向丝杆方向。
12、作为进一步的优化方案,纵向承托力度传感装置包括第一拉压力传感器、第一导杆,其中第一丝杆螺母滑块上设置有第一配装槽,且该第一拉压力传感器安装在第一配装槽内,承托底板配装在第一拉压力传感器检测端上。
13、作为进一步的优化方案,所述夹持机械臂包括横置驱动板、固定在横置驱动板上的横置驱动电机、横置正反牙丝杆、两个活动螺接在横置正反牙丝杆两端的第二丝杆螺母滑块;其中每个第二丝杆螺母滑块上配装有一夹持臂;其中横置驱动电机带动横置正反牙丝杆旋转,使得两个夹持臂相互靠近或相互远离,且承托底板位于横置驱动板的底部。
14、作为进一步的优化方案,夹持力度传感装置的数量为两个,两个分别安装在横置驱动板表面的两侧,其中每个夹持力度传感装置包括第二拉压力传感器、固定在横置驱动板上的第二支撑板,其中第二支撑板设置有第二配装槽,且该第二拉压力传感器安装在第二配装槽内,且第二拉压力传感器的检测端与第二丝杆螺母滑块连接。
15、作为进一步的优化方案,靠背表面两侧安装有沿靠背长度方向延伸的纵向滑轨,纵向滑块滑动设置在纵向滑轨上,其中纵向滑块与横置驱动板的背面固定连接。
16、作为进一步的优化方案,扶手支撑装置包括扶手气弹簧、扶手板,扶手气弹簧配装在椅座的一侧,且扶手板安装在扶手气弹簧的活动端上。
17、作为进一步的优化方案,所述提醒装置包括偏心振动马达,该偏心振动马达与主控机构通信连接,所述到位检测装置包括重量传感器,该重量传感器与主控机构通信连接。
18、作为进一步的优化方案,靠背底部与椅座后侧相互铰接;椅座的底部活动设置有一个推动电缸,该推动电缸的活动端与靠背底部活动连接,而且该推动电缸与主控机构通信连接。
19、作为进一步的优化方案,每个夹持臂包括前臂、中臂、后臂,中臂的两侧分别通过扭簧转轴分别与前臂、后臂活动连接。。
20、本发明的有益效果在于:通过夹持机械臂从腋下到后背进行抓握,能够提供更全面和稳固的支撑,从而降低腰椎承受的压力。这个设计创新了传统座椅的支撑方式,为用户提供更好的腰部舒适度和稳定性。
21、同时通过纵向驱动模块对夹持机械臂进行向上托举,可以减轻用户腰椎的受力,从而降低腰椎病的风险。对于长时间坐着工作的人群有很好的应用潜力。
22、座椅上的提醒装置可以帮助用户避免长时间久坐,以提高用户的坐姿质量和腰椎健康。而采用扶手支撑装置可以根据用户手的运动自动调整高度,提供更加符合人体工程学的支撑。
23、总体来说,可以改善用户在座位上的腰椎承受力和舒适度,进而预防和缓解腰椎病。对于现代人长时间坐着工作的情况,这样的座椅设计具有很好的应用前景。。
技术特征:
1.一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:包括座椅本体;
2.根据权利要求1所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:纵向驱动模块包括纵向驱动电机、纵向丝杆、活动螺接在纵向丝杆上的第一丝杆螺母滑块、与丝杆螺母滑块连接的承托底板,纵向驱动电机固定在靠背上,且纵向驱动电机带动纵向丝杆旋转,并使得第一丝杆螺母滑块带动承托底板沿纵向丝杆方向移动,且承托底板带动夹持机械臂沿纵向丝杆方向。
3.根据权利要求2所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:纵向承托力度传感装置包括第一拉压力传感器、第一导杆,其中第一丝杆螺母滑块上设置有第一配装槽,且该第一拉压力传感器安装在第一配装槽内,承托底板配装在第一拉压力传感器检测端上。
4.根据权利要求3所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:所述夹持机械臂包括横置驱动板、固定在横置驱动板上的横置驱动电机、横置正反牙丝杆、两个活动螺接在横置正反牙丝杆两端的第二丝杆螺母滑块;其中每个第二丝杆螺母滑块上配装有一夹持臂;其中横置驱动电机带动横置正反牙丝杆旋转,使得两个夹持臂相互靠近或相互远离,且承托底板位于横置驱动板的底部。
5.根据权利要求4所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:夹持力度传感装置的数量为两个,两个分别安装在横置驱动板表面的两侧,其中每个夹持力度传感装置包括第二拉压力传感器、固定在横置驱动板上的第二支撑板,其中第二支撑板设置有第二配装槽,且该第二拉压力传感器安装在第二配装槽内,且第二拉压力传感器的检测端与第二丝杆螺母滑块连接。
6.根据权利要求5所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:靠背表面两侧安装有沿靠背长度方向延伸的纵向滑轨,纵向滑块滑动设置在纵向滑轨上,其中纵向滑块与横置驱动板的背面固定连接。
7.根据权利要求6所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:扶手支撑装置包括扶手气弹簧、扶手板,扶手气弹簧配装在椅座的一侧,且扶手板安装在扶手气弹簧的活动端上。
8.根据权利要求1所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:所述提醒装置包括偏心振动马达,该偏心振动马达与主控机构通信连接,所述到位检测装置包括重量传感器,该重量传感器与主控机构通信连接。
9.根据权利要求1所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:靠背底部与椅座后侧相互铰接;椅座的底部活动设置有一个推动电缸,该推动电缸的活动端与靠背底部活动连接,而且该推动电缸与主控机构通信连接。
10.根据权利要求4所述的一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,其特征在于:每个夹持臂包括前臂、中臂、后臂,中臂的两侧分别通过扭簧转轴分别与前臂、后臂活动连接。
技术总结
本发明涉及座椅领域,尤指一种通过托举胁肋部位及手臂而减轻腰椎压力的电动座椅,包括座椅本体、到位检测装置、提醒装置、夹持机械臂、纵向驱动模块、纵向承托力度传感装置、扶手支撑装置;通过夹持机械臂从腋下到后背进行抓握,能够提供更全面和稳固的支撑,从而降低腰椎承受的压力。这个设计创新了传统座椅的支撑方式,为用户提供更好的腰部舒适度和稳定性。同时通过纵向驱动模块对夹持机械臂进行向上托举,可以减轻用户腰椎的受力,从而降低腰椎病的风险。对于长时间坐着工作的人群有很好的应用潜力。座椅上的提醒装置可以帮助用户避免长时间久坐,而采用扶手支撑装置可以根据用户手的运动自动调整高度,提供更加符合人体工程学的支撑。
技术研发人员:徐目云
受保护的技术使用者:徐目云
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!