车辆转向控制装置及其控制方法与流程
本公开的示例性实施方式涉及车辆转向控制装置和控制该车辆转向控制装置的方法,并且更具体地,涉及能够在自动行驶期间补偿由于方向盘的旋转运动引起的行驶方向的变化并且保持车辆自动行驶的车辆转向控制装置以及控制该车辆转向控制装置的方法。
背景技术:
1、通过驾驶员的方向盘操作,电机驱动助力驱转向(motor-driven powersteering,mdps)装置操作以改变车轮的方向,从而改变车辆的行驶方向。
2、mdps装置帮助驾驶员更容易地操作方向盘,从而控制车辆的行驶方向。
3、近年来,存在应用自动行驶技术的趋势,该自动行驶技术在驾驶员不干涉的情况下检测障碍物并且通过控制车辆的行驶方向使车辆能够行驶至目的地。
4、因此,车辆配备有相机和多个传感器,并且被配置为识别周围环境中的障碍物、检测道路情况,并且根据周围环境中的障碍物和道路情况来控制行驶方向。
5、自动行驶技术分为五个水平。在第一水平中,水平驾驶员驾驶车辆。在比简单地辅助驾驶员的第一水平高的第二水平中,在车辆行驶期间部分地应用自动化以辅助驾驶员。在第三水平中,车辆在条件环境中自动行驶。即,在高速道路等特定的道路状况下,车辆自动行驶,并且在危险状况产生的情况下,驾驶员进行干涉。在第四水平中,车辆在正常道路上自动行驶。在第五水平中,车辆在驾驶员不干涉的情况下完全自主行驶。
6、自动行驶技术的第二水平(其中部分地应用自动化)和第三水平(其中车辆在条件环境中自动行驶)已经应用于车辆。此外,第四水平或第五水平的自动行驶技术已应用于不具有驾驶员座位的无人驾驶客车等。
7、转向装置起着一种重要作用,因为必须根据检测到的障碍物和道路状况来控制该自动行驶车辆的行驶方向。
8、在题为“用于自动车辆的转向系统(a steering system for autonomousvehicle)”的韩国专利申请公开号10-2022-0090233中公开了本公开的相关技术。
9、在车辆行驶中检测到危险状况或发生了异常的情况下,驾驶员干涉车辆行驶。
10、当驾驶员在自动行驶模式中操作方向盘时,自动行驶模式会被停用,并且车辆切换至与驾驶员相关的车辆行驶。然而,在突然操作方向盘时,无法反映目标转向角度,使得难以控制行驶方向。因此,车辆有可能偏离其预期的行驶路线,导致交通事故的发生。
11、当在车辆行驶期间驾驶员失去意识或者方向盘由于外部冲击而旋转运动的情形下而停用自动行驶模式时,驾驶员不能应对该情形,使得不可能控制自动行驶。因此,可能发生交通事故。
12、因此,需要在车辆保持自动行驶的同时确定驾驶员是否实际参与自动行驶,并且根据确定的结果逐步停用自动行驶模式,而不是当在自动行驶期间方向盘旋转运动时立即停用自动行驶模式。
13、因此,需要在自动行驶期间根据方向盘的旋转运动来校正行驶方向并且保持车辆自动行驶。
14、[专利文献]
15、韩国专利申请公开号10-2022-0090233
技术实现思路
1、各种实施方式涉及一种车辆转向控制装置以及控制车辆转向控制装置的方法,该车辆转向控制装置能够在自动行驶期间检测到方向盘的旋转运动时在不使自动行驶模式停用的情况下使车辆自动行驶预定时间,并且能够补偿由于方向盘的旋转运动引起的行驶方向的变化,从而保持车辆稳定地行驶。
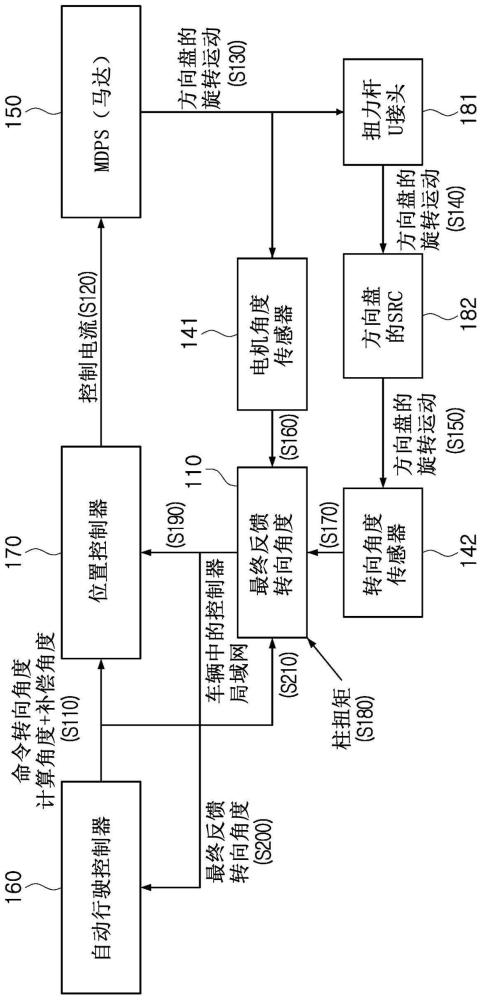
2、在本公开的实施方式中,车辆转向控制装置包括:转向装置,被配置为控制车辆的行驶方向;自动行驶控制器,被配置为计算用于在自动行驶模式中控制车辆的行驶方向的命令转向角度;位置控制器,被配置成响应于命令转向角度(commanded steering angle)控制转向装置;电机角度传感器,安装在转向装置中并且被配置为测量电机角度;转向角度传感器,安装在方向盘中并且被配置为测量与方向盘的旋转运动相对应的转向角度;以及处理器,被配置为以与车辆的自动行驶模式相对应的方式设置基准转向角度信号,使得基于从电机角度计算的第一转向角度信号和转向角度传感器的第二转向角度中的一个来控制转向装置,基于基准转向角度信号生成基于控制误差的反馈信号,并且将所生成的反馈信号应用于自动行驶控制器,其中,当在自动行驶模式中检测到方向盘的旋转运动时,处理器将基准转向角度信号改变为第二转向角度。
3、在本公开的实施方式中,在车辆转向控制装置中,当在自动行驶模式中检测到方向盘的旋转运动时,处理器可使车辆在自动行驶模式下保持预定时间并且可通过反馈信号补偿方向盘的旋转运动。
4、在本公开的实施方式中,在车辆转向控制装置中,当由于方向盘的旋转运动而维持柱扭矩所花费的时间超过预设时间并且由于方向盘的旋转运动而改变的命令转向角度的大小超过预设值时,处理器可将基准转向角度信号改变为第二转向角度信号。
5、在本公开的实施方式中,在车辆转向控制装置中,处理器可通过经由陷波滤波器、带阻滤波器和超前-滞后滤波器中的一个对柱扭矩进行滤波,来去除柱扭矩的谐振点。
6、在本公开的实施方式中,在车辆转向控制装置中,当由于方向盘的旋转运动而维持柱扭矩所花费的时间达到或者短于预设时间时或者当由于方向盘的旋转运动而改变的命令转向角度的大小达到或者小于预设值时,处理器可维持作为第一转向角度信号的基准转向角度信号。
7、在本公开的实施方式中,在车辆转向控制装置中,处理器可通过在指定时间内逐步调整反映率来改变基准转向角度信号。
8、在本公开的实施方式中,在车辆转向控制装置中,当在自动行驶模式中检测到方向盘的旋转运动时,处理器可通过改变使自动行驶模式停用的条件来使车辆保持在自动行驶模式下行驶。
9、在本公开的实施方式中,在车辆转向控制装置中,当方向盘的旋转运动满足改变后的条件或者当方向盘通过驾驶员的转向继续旋转运动时,处理器可停用自动行驶模式并且可切换至驾驶员转向模式。
10、在本公开的实施方式中,一种控制车辆转向控制装置的方法包括:以与车辆的自动行驶模式相对应的方式设置基准转向角度信号,使得基于从电机角度传感器的电机角度计算的第一转向角度信号和转向角度传感器的第二转向角度信号中的一个控制转向装置;在自动行驶模式中,由自动行驶控制器计算用于控制车辆的行驶方向的命令转向角度,并且通过位置控制器以与命令转向角度相对应的方式控制转向装置;由处理器基于第一转向角度信号生成控制误差的反馈信号,并且由处理器将所生成的反馈信号应用于位置控制器和自动行驶控制器;当在自动行驶模式中检测到方向盘的旋转运动时,将基准转向角度信号改变为第二转向角度信号;并且基于第二转向角度信号生成反馈信号并将所生成的反馈信号应用于位置控制器和自动行驶控制器。
11、在本公开的实施方式中,在该方法中,当在自动行驶模式中检测到方向盘的旋转运动时,可保持车辆在自动行驶模式下行驶,并且可通过反馈信号补偿方向盘的旋转运动。
12、在本公开的实施方式中,在该方法中,将基准转向角度信号改变为第二转向角度信号可包括:对由于方向盘的旋转运动而维持柱扭矩所花费的时间进行计数并且将所计数的维持柱扭矩所花费的时间与预设时间进行比较;将由于方向盘的旋转运动而改变的命令转向角度的大小与预设值进行比较;并且当维持柱扭矩所花费的时间超过预设时间并且命令转向角度的大小超过预设值时,将基准转向角度信号改变为第二转向角度信号。
13、在本公开的实施方式中,在该方法中,将基准转向角度信号改变为第二转向角度信号可进一步包括通过经由陷波滤波器、带阻滤波器和超前-滞后滤波器中的一个对柱扭矩进行滤波来去除柱扭矩的谐振点。
14、在本公开的实施方式中,该方法可进一步包括:当在自主模式中检测到方向盘的旋转运动时,当由于方向盘的旋转运动而维持柱扭矩所花费的时间达到或者短于预设时间时或者当由于方向盘的旋转运动而改变的命令转向角度的大小达到或者小于预设值时,维持作为第一转向角度信号的基准转向角度信号。
15、在本公开的实施方式中,在该方法中,在将基准转向角度信号改变为第二转向角度信号时,可以通过在指定时间内逐步调整反映率来将基准转向角度信号从第一转向角度信号改变为第二转向角度信号。
16、在本公开的实施方式中,方法还可包括:当在自动行驶模式中检测到方向盘的旋转运动时,通过改变使自动行驶模式停用的条件来使车辆保持在自动行驶模式下行驶;并且当方向盘的旋转运动满足改变后的条件时或者当方向盘通过驾驶员的转向继续旋转运动时,停用自动行驶模式并切换至驾驶员转向模式。
17、根据本公开的一方面,车辆转向控制装置和控制车辆转向控制装置的方法能够提供补偿由于在自动行驶期间检测到的方向盘的旋转运动而引起的车辆行驶方向的改变的效果。这种能力有助于防止车辆偏离其预期的行驶路线。因此,能够实现提高车辆行驶的稳定性的效果。
18、根据本公开的另一方面,车辆转向控制装置和控制车辆转向控制装置的方法能够响应于方向盘的旋转运动而保持车辆自动行驶而不停用自动行驶模式。这种能力有助于消除由行驶模式之间的切换引起的自动行驶的不稳定性,从而防止由于偏离车辆预期行驶路线和失去控制而导致的交通事故。
- 还没有人留言评论。精彩留言会获得点赞!