后配套拖车、后配套拖车的转向方法和盾构机与流程
本申请涉及隧道施工,尤其涉及一种后配套拖车、后配套拖车的转向方法和盾构机。
背景技术:
1、随着经济发展,城市化进程的加快,城市地铁、水利水电、公路、铁路等隧道都需要盾构来进行开挖,盾构以其安全快速等诸多优势而逐渐普及。
2、盾构机在结构上包括刀盘、盾体、螺旋输送机、皮带机、后配套拖车等,盾构机施工过程中,后配套拖车的始发阶段采用直轮对进行支撑行走,进入隧道后需要更换为斜轮对,斜轮对沿已成隧管片的内壁面行走。其中,后配套拖车在隧道中行进时,由于受到拖车拉力、拖车整体偏载、管片内环平整度、沙土等环境因素影响,导致后配套拖车容易向一边倾斜,导致后配套拖车行进速度减缓,后配套拖车不能较好的稳健运行。
技术实现思路
1、本申请的实施例提供一种后配套拖车、后配套拖车的转向方法和盾构机,采用闭环式的方向调整方式,可在最大程度上实现包胶轮的自动转向,从而保证后配套拖车的稳健运行;同时,本申请的装置可适用于不同类型隧道内后配套拖车的方向调整。
2、为了实现上述目的,本申请的实施例第一方面提供一种后配套拖车,包括拖车、包胶轮行走机构和控制器,所述包胶轮行走机构连接在所述拖车的下方;所述拖车上设置倾角传感器,所述包胶轮行走机构上设置有调向油缸和位移传感器,所述调向油缸和所述位移传感器相连,所述控制器分别和所述倾角传感器、所述调向油缸和所述位移传感器电连接;所述倾角传感器被配置为当所述拖车倾斜时检测所述拖车的实时运动轨迹与水平方向之间的实时倾斜角度值,所述倾角传感器还被配置为发送所述实时倾斜角度值至所述控制器,所述拖车倾斜运动时带动所述包胶轮行走机构转动;所述位移传感器被配置为当所述包胶轮行走机构转动时检测所述包胶轮行走机构的实时转动位移值,并发送所述实时转动位移值至所述控制器;所述控制器被配置为接收所述实时转动位移值并发送调向信号至所述调向油缸,所述调向油缸被配置为接收所述调向信号并对所述包胶轮行走机构进行调向操作,所述包胶轮行走机构根据所述调向操作进行转动并反向带动所述拖车运动,所述倾角传感器被配置为继续检测所述拖车的实时运动轨迹与水平方向之间的所述实时倾斜角度值;当所述实时倾斜角度值大于预设倾角值时,重复上述步骤,当所述实时倾斜角度值小于或等于预设倾角值时,所述控制器被配置为发送复位信号至所述调向油缸。
3、在一种可能的实现方式中,所述位移传感器还被配置为当所述调向油缸未完全复位时继续发送所述包胶轮行走机构的实时转动位移值至所述控制器,所述控制器被配置为接收所述实时转动位移值并继续发送所述复位信号至所述调向油缸,直至所述调向油缸复位完全。
4、在一种可能的实现方式中,还包括液压泵站,所述液压泵站设置在所述拖车上,所述液压泵站和所述调向油缸相连,所述液压泵站被配置为所述调向油缸提供动力。
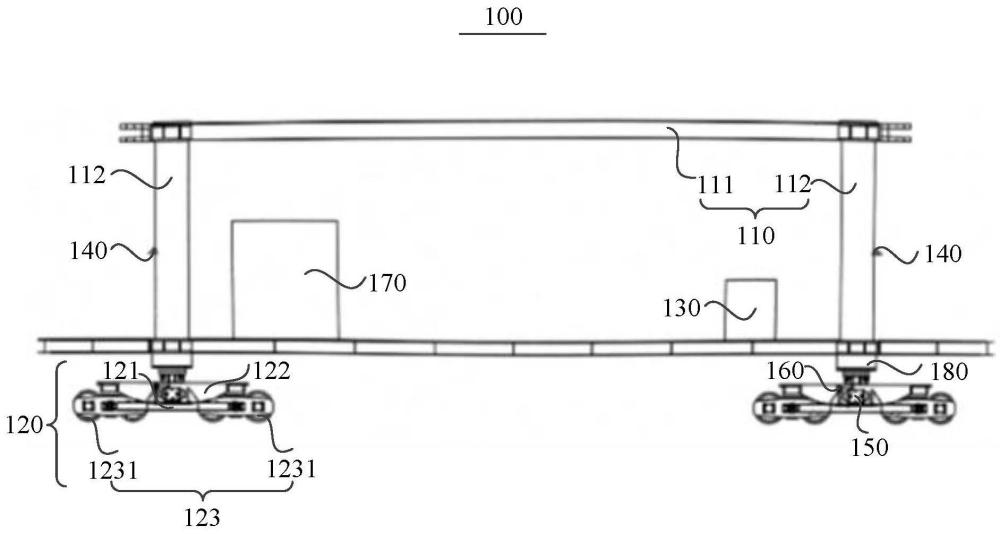
5、在一种可能的实现方式中,所述拖车包括拖车框架和设置在所述拖车框架上的立柱,所述倾角传感器设置在所述立柱上,所述包胶轮行走机构连接在所述拖车框架的下方。
6、在一种可能的实现方式中,所述包胶轮行走机构包括连杆、箱体和包胶轮对,所述包胶轮对包括两个包胶轮;所述箱体连接在所述拖车框架的下方,所述包胶轮对设置在所述箱体的背离所述拖车框架的一侧,所述连杆连接于两个所述包胶轮之间;所述拖车倾斜时带动所述包胶轮转动。
7、在一种可能的实现方式中,所述立柱包括两个,两个所述立柱相对设置在所述拖车框架上,所述倾角传感器包括两个,两个所述倾角传感器对应设置在两个所述立柱上;所述包胶轮行走机构包括两个,两个所述包胶轮行走机构对应设置在所述拖车框架的下方。
8、在一种可能的实现方式中,还包括连接座,所述拖车和所述包胶轮行走机构通过所述连接座相连。
9、本申请的实施例第二方面提供一种后配套拖车的转向方法,用于后配套拖车,所述后配套拖车的转向方法包括:当所述拖车倾斜时检测拖车的实时运动轨迹与水平方向之间的实时倾斜角度值,发送所述实时倾斜角度值至控制器;当所述包胶轮行走机构转动时检测包胶轮行走机构的实时转动位移值,并发送所述实时转动位移值至控制器;接收所述实时转动位移值并发送调向信号至调向油缸;接收所述调向信号并对所述包胶轮行走机构进行调向操作;根据所述调向操作进行转动并反向带动所述拖车运动;继续检测所述拖车的实时运动轨迹与水平方向之间的所述实时倾斜角度值;当所述实时倾斜角度值大于预设倾角值时,重复上述步骤,当所述实时倾斜角度值小于或等于预设倾角值时,发送复位信号至所述调向油缸。
10、在一种可能的实现方式中,在发送复位信号至所述调向油缸中,具体包括:当所述调向油缸未完全复位时继续发送所述包胶轮行走机构的实时转动位移值至所述控制器;接收所述实时转动位移值并继续发送所述复位信号至所述调向油缸,直至所述调向油缸复位完全。
11、本申请的实施例第三方面还提供一种盾构机,至少包括刀盘、盾体和后配套拖车;所述刀盘和所述盾体相连,所述刀盘位于所述盾构机的掘进端,所述后配套拖车设置于所述盾体后端。
12、本申请实施例提供的后配套拖车、后配套拖车的转向方法和盾构机,通过包括拖车、包胶轮行走机构和控制器,所述拖车上设置倾角传感器,所述包胶轮行走机构上设置有调向油缸和位移传感器。本申请采用闭环式的转向调节方式,可在最大程度上实现包胶轮的自动转向,从而保证后配套拖车的稳健运行;同时,本申请的装置可以适用于不同类型隧道内后配套拖车的方向调整。
13、本申请的构造以及它的其他申请目的及有益效果将会通过结合附图而对优选实施例的描述而更加明显易懂。
技术特征:
1.一种后配套拖车,其特征在于,包括拖车、包胶轮行走机构和控制器,所述包胶轮行走机构连接在所述拖车的下方;
2.根据权利要求1所述的后配套拖车,其特征在于,所述位移传感器还被配置为当所述调向油缸未完全复位时继续发送所述包胶轮行走机构的实时转动位移值至所述控制器,所述控制器被配置为接收所述实时转动位移值并继续发送所述复位信号至所述调向油缸,直至所述调向油缸复位完全。
3.根据权利要求2所述的后配套拖车,其特征在于,还包括液压泵站,所述液压泵站设置在所述拖车上,所述液压泵站和所述调向油缸相连,所述液压泵站被配置为所述调向油缸提供动力。
4.根据权利要求1-3中任一项所述的后配套拖车,其特征在于,所述拖车包括拖车框架和设置在所述拖车框架上的立柱,所述倾角传感器设置在所述立柱上,所述包胶轮行走机构连接在所述拖车框架的下方。
5.根据权利要求4所述的后配套拖车,其特征在于,所述包胶轮行走机构包括连杆、箱体和包胶轮对,所述包胶轮对包括两个包胶轮;
6.根据权利要求5所述的后配套拖车,其特征在于,所述立柱包括两个,两个所述立柱相对设置在所述拖车框架上,所述倾角传感器包括两个,两个所述倾角传感器对应设置在两个所述立柱上;
7.根据权利要求1-3中任一项所述的后配套拖车,其特征在于,还包括连接座,所述拖车和所述包胶轮行走机构通过所述连接座相连。
8.一种后配套拖车的转向方法,用于权利要求1-7中任一项所述的后配套拖车,其特征在于,所述后配套拖车的转向方法包括:
9.根据权利要求8所述的后配套拖车的转向方法,其特征在于,在发送复位信号至所述调向油缸中,具体包括:
10.一种盾构机,其特征在于,至少包括刀盘、盾体和上述权利要求1-7中任一项所述的后配套拖车;
技术总结
本申请提供一种后配套拖车、后配套拖车的转向方法和盾构机,涉及隧道施工技术领域,以解决相关技术的后配套拖车不能较好的稳健运行的问题。后配套拖车包括拖车、包胶轮行走机构和控制器;位移传感器检测包胶轮行走机构的实时转动位移值;控制器接收实时转动位移值并发送调向信号至调向油缸,调向油缸接收调向信号对包胶轮行走机构进行调向操作,包胶轮行走机构根据调向操作进行转动并带动拖车运动,倾角传感器继续检测拖车的实时运动轨迹与水平方向之间的实时倾斜角度值。本申请采用闭环式的方向调整方式,可在最大程度上实现包胶轮的自动转向,从而保证后配套拖车的稳健运行;同时,本申请的装置可适用于不同类型隧道内后配套拖车的方向调整。
技术研发人员:邓志强,王斌,李培,刘兴,王金华,陈仰辉,徐阳,丁一成,冉飞,李锋
受保护的技术使用者:中国铁建重工集团股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!