后配套拖车、后配套拖车的转向方法和盾构机与流程
本申请涉及隧道施工,尤其涉及一种后配套拖车、后配套拖车的转向方法和盾构机。
背景技术:
1、随着经济发展,城市化进程的加快,城市地铁、水利水电、公路、铁路等隧道都需要盾构来进行开挖,盾构以其安全快速等诸多优势而逐渐普及。
2、盾构机在结构上包括刀盘、盾体、螺旋输送机、皮带机、后配套拖车等,盾构机施工过程中,后配套拖车的始发阶段采用直轮对进行支撑行走,进入隧道后需要更换为斜轮对,斜轮对沿已成隧管片的内壁面行走。其中,后配套拖车在隧道中行进时,由于受到拖车拉力、拖车整体偏载、管片内环平整度、沙土等环境因素影响,导致后配套拖车容易跑偏,后配套拖车行进速度减缓,后配套拖车不能较好的稳健运行。
技术实现思路
1、本申请的实施例提供一种后配套拖车、后配套拖车的转向方法和盾构机,能够实时对后配套拖车进行纠偏,避免后配套拖车跑偏的问题,保证后配套拖车沿预设路线前行。同时,本申请的装置可适用于不同类型隧道内后配套拖车的方向调整。
2、为了实现上述目的,本申请的实施例第一方面提供一种后配套拖车,包括拖车、包胶轮、主控制器和子控制器,所述包胶轮连接在所述拖车的底部,所述主控制器和所述子控制器电连接,所述主控制器被配置为判断所述拖车在行驶过程中的实际跑偏值以及设置所述拖车的目标纠偏值,所述主控制器还被配置为将所述实际跑偏值和所述目标纠偏值发送至所述子控制器,所述目标纠偏值小于所述实际跑偏值;所述子控制器被配置为当所述拖车倾斜时获取所述拖车的倾斜角度值,所述子控制器还被配置为对所述拖车的倾斜角度值和所述拖车的实际跑偏值的大小进行判断,并调整所述拖车的倾斜角度值小于或等于所述目标纠偏值。
3、在一种可能的实现方式中,所述拖车上设置倾角传感器,所述倾角传感器和所述子控制器电连接;所述倾角传感器被配置为当所述拖车倾斜时获取所述拖车的倾角传感器信号,所述子控制器被配置为获取所述倾角传感器信号并对所述倾角传感器信号处理后得到所述拖车的倾斜角度值;所述子控制器还被配置为根据所述拖车的倾斜角度值计算所述包胶轮的跑偏量。
4、在一种可能的实现方式中,所述包胶轮和所述拖车之间连接有调向油缸,所述调向油缸用于对所述包胶轮进行调向操作;所述子控制器被配置为获取所述调向油缸的行程,所述子控制器还被配置为控制所述调向油缸的伸缩,以使所述调向油缸的伸缩量等于所述包胶轮的跑偏量进而实现对所述包胶轮的调向。
5、在一种可能的实现方式中,所述调向油缸上设置有行程传感器,所述行程传感器和所述子控制器电连接,所述子控制器被配置为通过所述行程传感器获取所述调向油缸的行程;和/或,所述调向油缸上设置有电液比例阀,所述电液比例阀和所述子控制器电连接,所述子控制器被配置为通过所述电液比例阀控制所述调向油缸的伸缩。
6、在一种可能的实现方式中,还包括导向装置,所述导向装置和所述子控制器电连接,所述导向装置被配置为获取所述拖车的行驶里程,并发送所述拖车的行程里程至所述子控制器;和/或,所述后配套拖车还包括触控装置,所述触控装置与所述主控制器电连接,所述主控制器被配置为通过所述触控装置获取现场操作人员的操作指令,并发送操作指令至所述子控制器。
7、在一种可能的实现方式中,所述包胶轮的数量包括多个,多个所述包胶轮连接在所述拖车底部的不同位置;所述倾角传感器的数量包括多个,多个所述倾角传感器至少设置在所述拖车的前端和后端;所述调向油缸的数量包括多个,多个所述调向油缸一一对应地连接在多个所述包胶轮和所述拖车之间;所述行程传感器的数量包括多个,多个所述行程传感器一一对应地设置在多个所述调向油缸上。
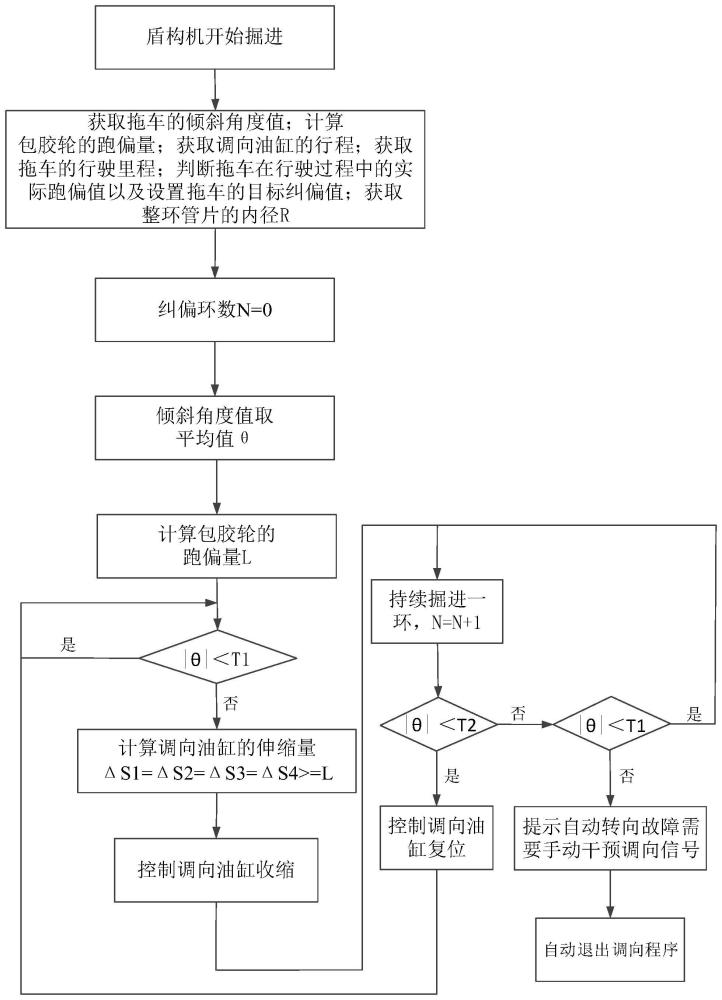
8、本申请的实施例第二方面提供一种后配套拖车的转向方法,用于后配套拖车,所述后配套拖车的转向方法包括:获取倾角传感器信号并对所述倾角传感器信号处理后得到拖车的倾斜角度值;计算包胶轮的跑偏量;获取调向油缸的行程;获取拖车的行驶里程;判断拖车在行驶过程中的实际跑偏值以及设置所述拖车的目标纠偏值;对所述拖车的倾斜角度值和所述拖车的实际跑偏值的大小进行判断;当所述拖车的倾斜角度值大于或等于所述拖车的实际跑偏值时,记录所述调向油缸当前的行程,控制所述调向油缸伸缩,当所述调向油缸当前的行程与上一个行程之差不小于所述包胶轮的跑偏量时,记录所述拖车当前的行驶里程,使纠偏环数n=0;当所述拖车的倾斜角度值小于所述拖车的实际跑偏值时,返回“对所述拖车的倾斜角度值和所述拖车的实际跑偏值的大小进行判断”的步骤;所述拖车持续向前,当所述拖车当前的行驶里程与所述拖车上一个行驶里程之差不小于拼装完成的1个整环管片的宽度时,记录所述调向油缸当前的行程;使纠偏环数n=n+1;当所述拖车的倾斜角度值小于所述拖车的目标纠偏值时,则纠偏成功,控制所述调向油缸复位,当所述调向油缸当前的行程与上一个行程之差不小于所述包胶轮的跑偏量时,返回“对所述拖车的倾斜角度值和所述拖车的实际跑偏值的大小进行判断”的步骤;当所述拖车的倾斜角度值大于所述拖车的目标纠偏值且小于所述拖车的实际跑偏值时,返回“所述拖车持续向前”的步骤;当所述拖车的倾斜角度值大于所述拖车的实际跑偏值时,提示自动转向故障需要手动干预调向,并自动退出调向程序。
9、在一种可能的实现方式中,在“获取倾角传感器信号并对所述倾角传感器信号处理后得到拖车的倾斜角度值”的步骤中,具体包括:倾角传感器信号为多个连续的信号值,对多个所述倾角传感器信号处理后得到多个连续的倾斜角度值,对多个倾斜角度值取平均值;在“计算包胶轮的跑偏量”的步骤中,具体包括:设置拼装完成的一个整环管片的内径,根据所述拖车的倾斜角度值计算包胶轮的跑偏量,包胶轮的跑偏量的计算公式为:l=2×r×sinθ/2,其中,l为包胶轮的跑偏量,θ为多个倾斜角度值的平均值,r为拼装完成的一个整环管片的内径。
10、在一种可能的实现方式中,在“当所述拖车当前的行驶里程与所述拖车上一个行驶里程之差不小于拼装完成的1个整环管片的宽度时”的步骤中,具体包括:设置一个整环管片的宽度,拖车在纠偏过程中的行驶里程的计算公式为:s=n×w,其中,s为拖车在纠偏过程中的行驶里程,n为纠偏环数,w为一个整环管片的宽度。
11、本申请的实施例第三方面还提供一种盾构机,至少包括刀盘、盾体和后配套拖车;所述刀盘和所述盾体相连,所述刀盘位于所述盾构机的掘进端,所述后配套拖车设置于所述盾体后端。
12、本申请实施例提供的后配套拖车、后配套拖车的转向方法和盾构机,后配套拖车包括拖车、包胶轮、主控制器和子控制器,所述子控制器还被配置为对所述拖车的倾斜角度值和所述拖车的实际跑偏值的大小进行判断,并调整所述拖车的倾斜角度值小于或等于所述目标纠偏值。这样,能够实时对后配套拖车进行纠偏,避免后配套拖车跑偏的问题,保证后配套拖车沿预设路线前行。同时,本申请的装置可适用于不同类型隧道内后配套拖车的方向调整。
13、本申请的构造以及它的其他申请目的及有益效果将会通过结合附图而对优选实施例的描述而更加明显易懂。
技术特征:
1.一种后配套拖车,其特征在于,包括拖车、包胶轮、主控制器和子控制器,所述包胶轮连接在所述拖车的底部,所述主控制器和所述子控制器电连接,所述主控制器被配置为判断所述拖车在行驶过程中的实际跑偏值以及设置所述拖车的目标纠偏值,所述主控制器还被配置为发送所述实际跑偏值和所述目标纠偏值至所述子控制器,所述目标纠偏值小于所述实际跑偏值;
2.根据权利要求1所述的后配套拖车,其特征在于,所述拖车上设置倾角传感器,所述倾角传感器和所述子控制器电连接;
3.根据权利要求2所述的后配套拖车,其特征在于,所述包胶轮和所述拖车之间连接有调向油缸,所述调向油缸用于对所述包胶轮进行调向操作;
4.根据权利要求3所述的后配套拖车,其特征在于,所述调向油缸上设置有行程传感器,所述行程传感器和所述子控制器电连接,所述子控制器被配置为通过所述行程传感器获取所述调向油缸的行程;和/或,所述调向油缸上设置有电液比例阀,所述电液比例阀和所述子控制器电连接,所述子控制器被配置为通过所述电液比例阀的电信号控制所述调向油缸的伸缩。
5.根据权利要求4所述的后配套拖车,其特征在于,还包括导向装置,所述导向装置和所述子控制器电连接,所述导向装置被配置为获取所述拖车的行驶里程,并发送所述拖车的行程里程至所述子控制器;和/或,所述后配套拖车还包括触控装置,所述触控装置与所述主控制器电连接,所述主控制器被配置为通过所述触控装置获取现场操作人员的操作指令,并发送操作指令至所述子控制器。
6.根据权利要求5所述的后配套拖车,其特征在于,所述包胶轮的数量包括多个,多个所述包胶轮连接在所述拖车底部的不同位置;所述倾角传感器的数量包括多个,多个所述倾角传感器至少设置在所述拖车的前端和后端;所述调向油缸的数量包括多个,多个所述调向油缸一一对应地连接在多个所述包胶轮和所述拖车之间;所述行程传感器的数量包括多个,多个所述行程传感器一一对应地设置在多个所述调向油缸上。
7.一种后配套拖车的转向方法,用于权利要求1-6中任一项所述的后配套拖车,其特征在于,所述后配套拖车的转向方法包括:
8.根据权利要求7所述的后配套拖车的转向方法,其特征在于,在“获取倾角传感器信号并对所述倾角传感器信号处理后得到拖车的倾斜角度值”的步骤中,具体包括:
9.根据权利要求8所述的后配套拖车的转向方法,其特征在于,在“当所述拖车当前的行驶里程与所述拖车上一个行驶里程之差不小于拼装完成的1个整环管片的宽度时”的步骤中,具体包括:
10.一种盾构机,其特征在于,至少包括刀盘、盾体和上述权利要求1-6中任一项所述的后配套拖车;所述刀盘和所述盾体相连,所述刀盘位于所述盾构机的掘进端,所述后配套拖车设置于所述盾体后端。
技术总结
本申请提供一种后配套拖车、后配套拖车的转向方法和盾构机,涉及隧道施工技术领域,以解决相关技术的后配套拖车跑偏的问题。后配套拖车包括拖车、包胶轮、主控制器和子控制器,子控制器被配置为当拖车倾斜时获取拖车的倾斜角度值,子控制器还被配置为对拖车的倾斜角度值和拖车的实际跑偏值的大小进行判断,并调整拖车的倾斜角度值小于或等于目标纠偏值。本申请能够实时对后配套拖车进行纠偏,避免后配套拖车跑偏的问题,保证后配套拖车沿预设路线前行。同时,本申请的装置可适用于不同类型隧道内后配套拖车的方向调整。
技术研发人员:蔡杰,钟雷辉,黄文韬,徐福宇,陈翠武,王凯,邓智勋,周帅华
受保护的技术使用者:中国铁建重工集团股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!