一种风机控制方法与智能清洁机器人与流程
本申请涉及清洁机器人的,尤其涉及一种风机控制方法与智能清洁机器人。
背景技术:
1、擦窗机产品在清洁面上工作过程中会存在漏气的现象,包括擦窗机的负压腔(也称之为真空腔)漏气使其与外部的大气压相连通、擦窗机行走到出现漏气的位置(例如,越过缝隙、移动到台阶区域、被抬举起来等)、擦窗机所吸附的清洁面出现漏气,会引起风机的负载增大,风机的转速下降,风机的吸力也下降,而现有技术采用功率环路控制(电机输出功率闭环调节为主)的电机进行吸力控制的方式,仍不能够满足擦窗机维持于合理的负压状态以达成稳定清洁效果和安全吸附的要求。
技术实现思路
1、本申请公开一种风机控制方法与智能清洁机器人,具体技术方案如下:
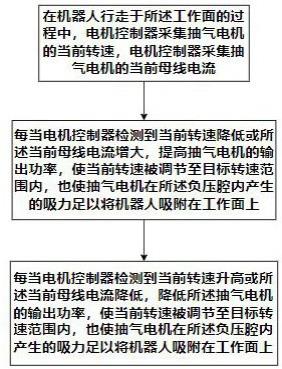
2、一种风机控制方法,机器人包括主控器和风机,风机包括抽气电机和电机控制器,抽气电机所在装配空间与机器人的底座构成负压腔,风机用于控制机器人吸附在工作面上;所述风机控制方法包括:在机器人行走于所述工作面的过程中,电机控制器采集抽气电机的当前转速,电机控制器采集抽气电机的当前母线电流;每当电机控制器检测到当前转速降低或所述当前母线电流增大,提高抽气电机的输出功率,使当前转速被调节至目标转速范围内,也使抽气电机在所述负压腔内产生的吸力足以将机器人吸附在工作面上;每当电机控制器检测到当前转速升高或所述当前母线电流降低,降低所述抽气电机的输出功率,使当前转速被调节至目标转速范围内,也使抽气电机在所述负压腔内产生的吸力足以将机器人吸附在工作面上。因此本技术方案通过改变抽气电机的输出功率来调节转速,配合闭环调节以动态获得适用场景广的转速,提高动态调节的转速的准确性,保证当前气压环境下风机可达到有效吸附所述工作面的所需风力;可以克服:现有技术中风机保持输出功率不变的闭环控制方式不能保持所述负压腔处于负压状态,导致装配风机的机器人不能实现稳定行走效果和安全吸附的问题。
3、智能清洁机器人,智能清洁机器人包括主控器和风机,风机包括抽气电机和电机控制器,抽气电机所在装配空间与机器人的底座构成负压腔,风机用于控制机器人吸附在工作面上;智能清洁机器人的底座左右两侧各安装一个清洁转盘,用于支持智能清洁机器人在其所吸附的工作面上进行清洁作业;智能清洁机器人被配置为所述风机控制方法。
4、相对于现有技术,本技术方案公开的智能清洁机器人通过执行前述实施例公开的风机控制方法,减少因外部控制器(本申请中的主控器)和气压传感器的检测数据漂移而造成系统的延迟,而且,结合风机所在腔体环境(负压腔和工作面)的漏气情况,对抽气电机的转速进行调节,适应于腔体各种气压情况,在提高抽气电机的输出功率的情况下将当前转速动态调节到一个稳定状态下,保证抽气电机在任何腔体气压状态变化情况(包括出现漏气和不出现漏气的情况)下使用时按照稳定状态下的转速运行便可达到吸附到工作面所需的吸力。不论负压腔体气密性如何变化,都实现时刻保持转速稳定,保持当前转速稳定就可以使负压腔内部形成的腔体气压保持稳定,可以克服:现有技术中风机保持输出功率不变的闭环控制方式不能保持所述负压腔处于负压状态,导致装配风机的机器人不能实现稳定行走效果和安全吸附的问题。
技术特征:
1.一种风机控制方法,机器人包括主控器和风机,风机包括抽气电机和电机控制器,抽气电机所在装配空间与机器人的底座构成负压腔,风机用于控制机器人吸附在工作面上;其特征在于,所述风机控制方法包括:
2.根据权利要求1所述风机控制方法,其特征在于,当所述电机控制器检测到所述当前转速大于或等于参考转速时,确定所述负压腔内部形成的气压被调节到目标气压,然后降低抽气电机的输出功率,使当前转速被调节至等于参考转速,也使抽气电机在所述负压腔内产生的吸力足以将机器人吸附在工作面上;
3.根据权利要求2所述风机控制方法,其特征在于,当所述电机控制器检测到所述当前转速大于参考转速时,执行:
4.根据权利要求1所述风机控制方法,其特征在于,所述电机控制器检测到出现漏气时,确定机器人当前所处位置出现漏气,并确定当前转速小于基准风机转速,然后提高所述抽气电机的输出功率以增大所述当前转速,实现对风机的当前转速进行闭环调节;并触发主控器发出相应的动作指令,以控制机器人避开当前所处位置,直至检测到不出现漏气。
5.根据权利要求3所述风机控制方法,其特征在于,所述电机控制器检测漏气情况的方法包括:
6.根据权利要求5所述风机控制方法,其特征在于,所述电机控制器根据当前转速与基准电机转速之间的大小关系检测漏气情况的方法包括:
7.根据权利要求6所述风机控制方法,其特征在于,所述电机控制器根据当前母线电流与基准母线电流之间的大小关系检测漏气情况的方法包括:
8.根据权利要求7所述风机控制方法,其特征在于,所述风机控制方法还包括:所述电机控制器判断到所述当前转速大于或等于所述待比较电机转速,和/或判断到所述当前母线电流小于或等于所述待比较母线电流时,检测到没有出现漏气,然后降低所述抽气电机的输出功率,以降低抽气电机产生的当前转速,并将机器人保持吸附在所述工作面。
9.根据权利要求2所述风机控制方法,其特征在于,在采集所述当前转速和所述当前母线电流之前,还包括:
10.根据权利要求9所述风机控制方法,其特征在于,所述主控器通过预处理获得基准电机转速和基准风机电流的方法包括:
11.智能清洁机器人,智能清洁机器人包括主控器和风机,风机包括抽气电机和电机控制器,抽气电机所在装配空间与机器人的底座构成负压腔,风机用于控制机器人吸附在工作面上;智能清洁机器人的底座左右两侧各安装一个清洁转盘,用于支持智能清洁机器人在其所吸附的工作面上进行清洁作业;其特征在于,智能清洁机器人被配置为执行权利要求1至10中任一项所述风机控制方法。
12.根据权利要求11所述智能清洁机器人,其特征在于,所述抽气电机采用无刷电机在所述负压腔内部抽气形成相应气压,以将所述智能清洁机器人吸附到所述工作面中;在执行权利要求1至10中任一项所述风机控制方法的过程中,电机控制器支持对所述当前转速进行闭环调节。
技术总结
本申请公开一种风机控制方法与智能清洁机器人,所述风机控制方法包括:在机器人行走于所述工作面的过程中,电机控制器采集抽气电机的当前转速,电机控制器采集抽气电机的当前母线电流;每当电机控制器检测到当前转速降低或所述当前母线电流增大,提高抽气电机的输出功率,使当前转速被调节至目标转速范围内,也使抽气电机在所述负压腔内产生的吸力足以将机器人吸附在工作面上;每当电机控制器检测到当前转速升高或所述当前母线电流降低,降低所述抽气电机的输出功率,使当前转速被调节至目标转速范围内,克服现有技术中风机保持输出功率不变的闭环控制方式存在的行走稳定性问题和安全吸附问题。
技术研发人员:王悦林,梁铧杰,赖钦伟
受保护的技术使用者:珠海一微半导体股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!