拖布清洗方法、装置、清洗基座和存储介质与流程
本申请涉及清洁机器人,特别是涉及一种拖布清洗方法、装置、清洗基座、存储介质和计算机程序产品。
背景技术:
1、随着科学技术的快速发展和人民生活水平的不断提高,以扫地机为代表的各类清洗设备,在日常生产、生活中的使用越来越广泛,给人们带来了极大的便利。清洗设备往往配备清洗基座,清洗设备回到清洗基座后可实现拖布清洗。
2、然而,相关技术中拖布很容易出现清洗不干净或者过度清洗的问题。
技术实现思路
1、基于此,有必要提供一种拖布清洗方法、装置、清洗基座、存储介质和计算机程序产品,以解决清洗设备的拖布容易清洗不干净或者清洗过度的问题。
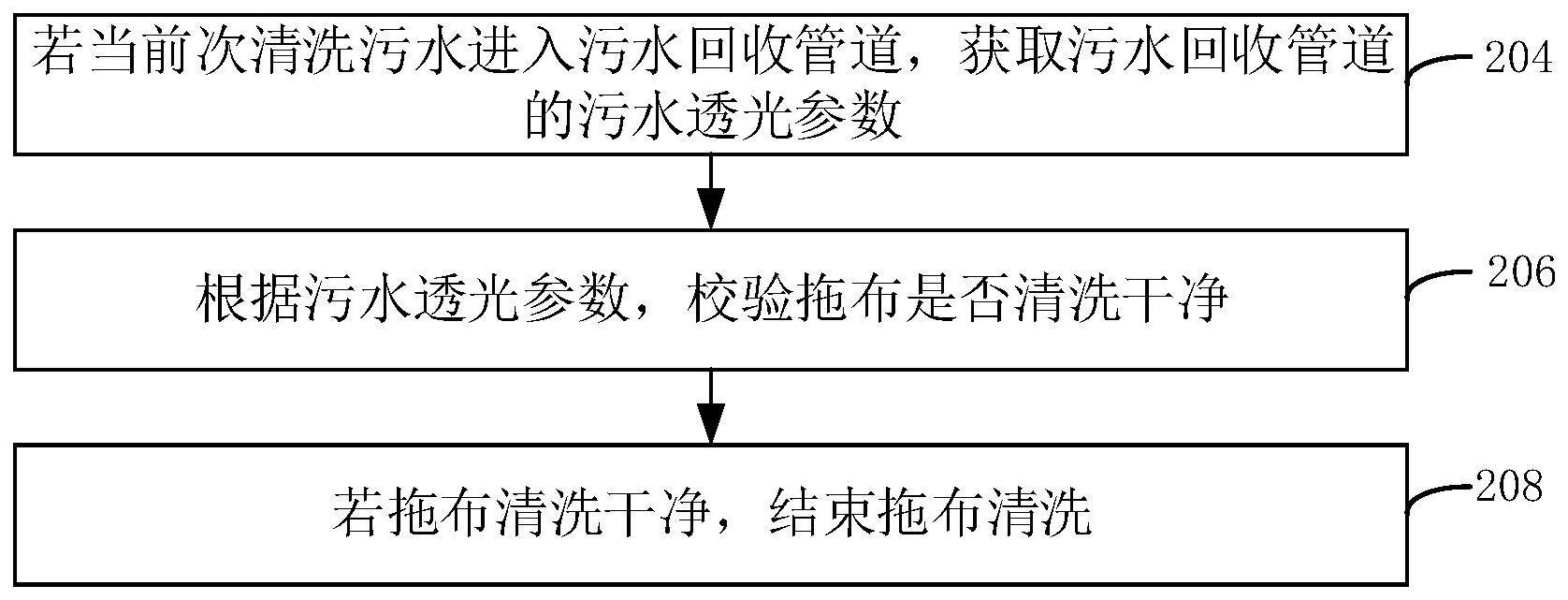
2、一种拖布清洗方法,包括:若当前次清洗污水进入污水回收管道,获取所述污水回收管道的污水透光参数;根据所述污水透光参数,校验拖布是否清洗干净;若所述拖布清洗干净,结束拖布清洗。
3、上述拖布清洗方法,在拖布进行当前次清洗结束,当前次清洗污水进入污水回收管道的情况下,能够获取污水回收管道的污水透光参数。最终以污水透光参数,分析拖布是否清洗干净,在拖布清洗干净的情况下,结束拖布清洗。该方案能够在每一次拖布清洗时,结合清洗得到的实际污水情况,判断当前次清洗是否已经把拖布清洗干净,在清洗干净的情况下直接结束清洗。相对固定清洗次数的方式,既能保证拖布清洗干净,还能避免过度清洗,造成不必要的水资源浪费。
4、在一个实施例中,所述获取所述污水回收管道的污水透光参数,包括:控制设置于所述污水回收管道的侧壁的红外发射管开启运行;获取设置于所述红外发射管相对一侧的红外接收管采集的红外接收信号;根据所述红外接收信号,确定所述污水回收管道的污水透光参数。
5、在一个实施例中,所述根据所述红外接收信号,确定所述污水回收管道的污水透光参数,包括:根据所述红外接收信号,以及预设的红外接收信号和透光参数的对应关系,确定所述污水回收管道的污水透光参数。
6、在一个实施例中,所述若当前次清洗污水进入污水回收管道,获取所述污水回收管道的污水透光参数之前,还包括:若当前次拖布清洗结束,且当前次清洗污水未进入污水回收管道,获取所述污水回收管道的初始透光参数;
7、所述根据所述污水透光参数,校验拖布是否清洗干净,包括:根据所述污水透光参数和所述初始透光参数,校验拖布是否清洗干净。
8、在一个实施例中,所述初始透光参数包括初始阻值,所述污水透光参数包括污水阻值。
9、在一个实施例中,所述根据所述污水透光参数和所述初始透光参数,校验拖布是否清洗干净,包括:获取所述污水透光参数和所述初始透光参数的透光参数差值;根据所述透光参数差值校验拖布是否清洗干净。
10、在一个实施例中,所述根据所述透光参数差值校验拖布是否清洗干净,包括:校验所述透光参数差值是否满足预设清洁条件;若所述透光参数差值满足所述预设清洁条件,确定拖布清洗干净。
11、在一个实施例中,所述校验所述透光参数差值是否满足预设清洁条件,包括:判断所述透光参数差值是否小于预设透光参数阈值;若所述透光参数差值小于所述预设透光参数阈值,确定所述透光参数差值满足预设清洁条件。
12、在一个实施例中,所述获取所述污水回收管道的初始透光参数,包括:每间隔第一预设时长获取一个透光参数;根据各所述透光参数确定所述污水回收管道的初始透光参数;
13、和/或,所述获取所述污水回收管道的污水透光参数,包括:每间隔第二预设时长获取一个透光参数;根据各所述透光参数确定所述污水回收管道的污水透光参数。
14、在一个实施例中,所述若当前次拖布清洗结束,且当前次清洗污水未进入污水回收管道,获取所述污水回收管道的初始透光参数之前,还包括:若检测满足拖布清洗条件,控制清水流入清洗仓进行拖布清洗。
15、在一个实施例中,所述根据所述污水透光参数和所述初始透光参数,校验拖布是否清洗干净之后,还包括:若所述拖布未清洗干净,且检测当前次清洗污水回抽完成,返回所述控制清水流入清洗仓进行拖布清洗的步骤。
16、一种拖布清洗装置,包括:污水透光检测模块,用于若当前次清洗污水进入污水回收管道,获取所述污水回收管道的污水透光参数;清洗检测模块,用于根据所述污水透光参数,校验拖布是否清洗干净;结束控制模块,用于若所述拖布清洗干净,结束拖布清洗。
17、一种清洗基座,包括基座本体、透光检测器和处理器,所述基座本体开设有清水仓、清洗仓和污水回收仓,所述清水仓连接所述清洗仓,所述清洗仓通过污水回收管道连接所述污水回收仓,所述透光检测器设置于所述污水回收管道,所述透光检测器连接所述处理器,所述透光检测器用于采集透光数据并发送至所述处理器,所述处理器用于根据所述透光数据确定污水透光参数,并执行上述拖布清洗方法的步骤。
18、在一个实施例中,所述透光检测器包括红外发射管和红外接收管,所述红外发射管和所述红外接收管分别设置于所述污水回收管道的相对两侧,所述红外发射管和所述红外接收管分别连接所述处理器。
19、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述拖布清洗方法的步骤。
20、一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述拖布清洗方法的步骤。
技术特征:
1.一种拖布清洗方法,其特征在于,包括:
2.根据权利要求1所述的拖布清洗方法,其特征在于,所述获取所述污水回收管道的污水透光参数,包括:
3.根据权利要求2所述的拖布清洗方法,其特征在于,所述根据所述红外接收信号,确定所述污水回收管道的污水透光参数,包括:
4.根据权利要求1-3任意一项所述的拖布清洗方法,其特征在于,所述若当前次清洗污水进入污水回收管道,获取所述污水回收管道的污水透光参数之前,还包括:
5.根据权利要求4所述的拖布清洗方法,其特征在于,所述初始透光参数包括初始阻值,所述污水透光参数包括污水阻值。
6.根据权利要求4所述拖布清洗方法,其特征在于,所述根据所述污水透光参数和所述初始透光参数,校验拖布是否清洗干净,包括:
7.根据权利要求6所述的拖布清洗方法,其特征在于,所述根据所述透光参数差值校验拖布是否清洗干净,包括:
8.根据权利要求7所述的拖布清洗方法,其特征在于,所述校验所述透光参数差值是否满足预设清洁条件,包括:
9.根据权利要求4所述拖布清洗方法,其特征在于,所述获取所述污水回收管道的初始透光参数,包括:每间隔第一预设时长获取一个透光参数;根据各所述透光参数确定所述污水回收管道的初始透光参数;
10.根据权利要求4所述拖布清洗方法,其特征在于,所述若当前次拖布清洗结束,且当前次清洗污水未进入污水回收管道,获取所述污水回收管道的初始透光参数之前,还包括:
11.根据权利要求10所述的拖布清洗方法,其特征在于,所述根据所述污水透光参数和所述初始透光参数,校验拖布是否清洗干净之后,还包括:
12.一种拖布清洗装置,其特征在于,包括:
13.一种清洗基座,其特征在于,包括基座本体、透光检测器和处理器,所述基座本体开设有清水仓、清洗仓和污水回收仓,所述清水仓连接所述清洗仓,所述清洗仓通过污水回收管道连接所述污水回收仓,所述透光检测器设置于所述污水回收管道,所述透光检测器连接所述处理器,所述透光检测器用于采集透光数据并发送至所述处理器,所述处理器用于根据所述透光数据确定污水透光参数,并执行权利要求1-11任意一项所述拖布清洗方法的步骤。
14.根据权利要求13所述的清洗基座,其特征在于,所述透光检测器包括红外发射管和红外接收管,所述红外发射管和所述红外接收管分别设置于所述污水回收管道的相对两侧,所述红外发射管和所述红外接收管分别连接所述处理器。
15.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至11中任一项所述拖布清洗方法的步骤。
16.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至11中任一项所述拖布清洗方法的步骤。
技术总结
本申请涉及一种拖布清洗方法、装置、清洗基座、存储介质和计算机程序产品,在拖布进行当前次清洗结束,当前次清洗污水进入污水回收管道的情况下,能够获取污水回收管道的污水透光参数。最终以污水透光参数,分析拖布是否清洗干净,在拖布清洗干净的情况下,结束拖布清洗。该方案能够在每一次拖布清洗时,结合清洗得到的实际污水情况,判断当前次清洗是否已经把拖布清洗干净,在清洗干净的情况下直接结束清洗。相对固定清洗次数的方式,既能保证拖布清洗干净,还能避免过度清洗,造成不必要的水资源浪费。
技术研发人员:巢珺,宁瀛锋,张祝宾,王锦辉,李硕磊,罗嘉
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!