一种应用于手持洗地机器的运行里程计算方法与流程
本发明涉及智能机器人领域,尤其涉及一种应用于手持洗地机器的运行里程计算方法。
背景技术:
1、洗地机器广泛应用于工业、商业和家庭环境,用于地面的清洁和维护。在实际使用过程中,洗地机器的运行里程是一个重要的参数,对于机器的维护、耗材使用寿命的统计、使用成本的计算以及工作计划的制定具有重要意义。然而,传统的手持洗地机器缺乏有效的里程估算方法,往往需要手动计数或者预估,效率低下且容易出错。因此,提出一种准确、自动的洗地机器里程估算方法具有重要意义。
2、目前针对于手持洗地机器缺乏有效的里程估算方法,主要是通过imu和编码器等多传感器进行数据融合计算出机器运行的里程。该方法主要包括以下步骤:1、数据采集:通过imu传感器测量得到线加速度、角速度等数据。同时,通过编码器记录轮子的圈数以及轮子的直径和轮间距等信息。2、数据预处理:对采集到的数据进行预处理,包括数据清洗、滤波等操作,以去除噪声和异常值。3、位姿初始化:在0时刻,设置位姿速度全为0,即位姿初始化为里程计起点。4、重力初始化:利用第一帧数据(假设当前载体处于静止状态)的加速度作为重力加速度项。5、位姿求解:根据imu和编码器的数据,求解位姿,包括位置和姿态。这一步需要将imu坐标系下的加速度转化到全局坐标系下的加速度。求解位姿的方法有很多,例如旋转矩阵表示方法等。但通过多传感器融合算法,推算出机器人的运行里程,软件算法复杂,不易实现;由于手持洗地机器是通过盘刷刷地的摩擦力和操作人员手动向前推的方式进行运行的,盘刷电机转动的圈数与机器实际运行的里程并不是一一对应的关系,所以不能通过盘刷电机安装编码器来计算里程;且需要高精度imu模块进行数据采集也增加了成本。
技术实现思路
1、本发明的目的是克服背景技术中存在的上述缺陷,提供一种应用于手持洗地机器的运行里程计算方法,通过利用里程检测传感器获取数据和其他参数进行计算,可以获得更准确、更客观的里程估算结果,进一步根据公式可以计算出已清扫的面积,且成本低,具有良好的实用性和广泛的应用前景。
2、本发明为解决上述技术问题采用以下技术方案:
3、一种应用于手持洗地机器的运行里程计算方法,其特征在于,通过安装在手持洗地机器上的里程计算传感器收集数据,将收集到的数据输入到预先设定的计算公式中,计算出手持洗地机器的运行里程,进一步通过公式计算出已清扫的面积,并将计算结果存储在机器的内置存储器中,可供用户或维护人员查阅,如果需要,用户或维护人员还可以根据实际需要调整计算公式的参数,以获得更准确的里程和面积估算结果。
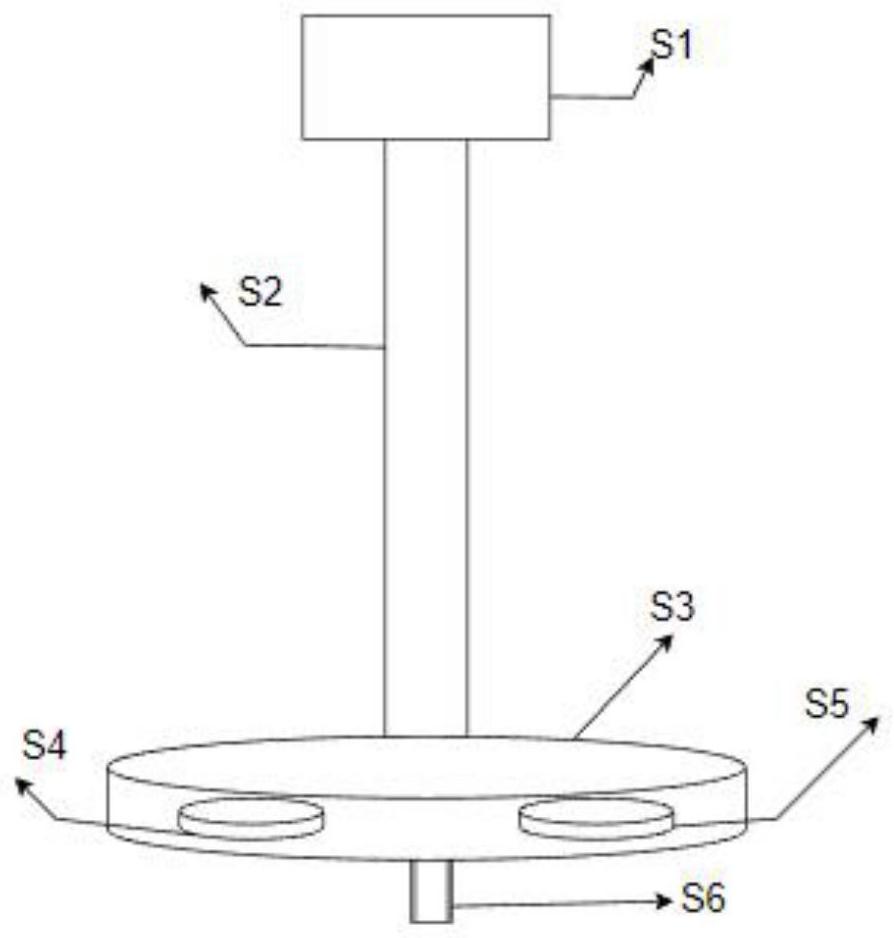
4、进一步的,在机器底盘结构上面合适位置安装里程计算传感器,其中滚轮上面安装有里程计算传感器的触发器,里程计算传感器的接收器安装在固定钣金上面,当机器在正常洗地过程中,当操作人按下整机控制系统上面的启动工作按键后,两个盘刷电机开始转动,左侧电机按顺时针转动,右侧电机按逆时针转动,机器在两个盘刷的运行下,外加操作人施加一个向前的推力,机器开始向前方进行洗地工作,这时里程计算传感器上面的滚轮就会由于地面摩擦力的作用,开始向前滚动,当滚轮每转动一圈,滚轮上的里程计算传感器的触发器就会有一次机会和里程计算传感器的接收器重合,从而使里程计算传感器的接收器的信号由低电平变化为高电平,整机控制系统检测到里程计算传感器接收器的信号发生了变化,变量trigger_count就会进行累加计数。
5、进一步的,当操作人员按下整机控制系统上面的停止工作按键后,软件就会得到当前已经统计的电平变化的次数trigger_count的值,由此可计算出当前手持洗地机器的运行里程,计算公式:
6、l=π*d*trigger_count (1)
7、其中:l为运行里程,单位:m;π为3.14159;d为滚轮k4的直径,单位:m;trigger_count为检测到的电平触发次数。
8、进一步的,当前已清扫的面积计算公式:
9、s=l*w (2)
10、其中:l为计算出的运行里程,单位:m;w为机器底盘的宽度,单位:m。
11、进一步的,计算公式还可以根据不同型号、不同用途的洗地机器进行调整。
12、进一步的,软件程序将上述计算出的当前运行里程l和当前已清扫的面积s,存储到内存,并上报给远程控制平台,方便用户或维护人员查阅,为机器日后的维护提供数据支撑。
13、本发明采用以上技术方案与现有技术相比,具有以下有益效果:
14、1、本发明通过利用里程计算传感器数据和其他参数进行计算,可以获得更准确、更客观的里程估算结果。
15、2、用户或维护人员可以随时查阅估算的里程数和已清扫面积,从而更好地了解机器的运行状况和使用效率。
16、3、本发明可以根据实际需要调整计算公式,以适应不同型号、不同用途的洗地机器。
17、4、本发明能够降低实现洗地机器里程估算的设备成本,技术实现更简单。
技术特征:
1.一种应用于手持洗地机器的运行里程计算方法,其特征在于,通过安装在手持洗地机器上的里程计算传感器收集数据,将收集到的数据输入到预先设定的计算公式中,计算出手持洗地机器的运行里程,进一步通过公式计算出已清扫的面积,并将计算结果存储在机器的内置存储器中,可供用户或维护人员查阅,如果需要,用户或维护人员还可以根据实际需要调整计算公式的参数,以获得更准确的里程和面积估算结果。
2.根据权利要求1所述的一种应用于手持洗地机器的运行里程计算方法,其特征在于,在机器底盘结构(s3)上面合适位置安装里程计算传感器(s6),其中滚轮(k4)上面安装有里程计算传感器的触发器(k3),里程计算传感器的接收器(k2)安装在固定钣金(k1)上面,当机器在正常洗地过程中,当操作人按下整机控制系统(s1)上面的启动工作按键后,两个盘刷电机(s4)和(s5)开始转动,其中盘刷电机(s4)顺时针转动,盘刷电机(s5)逆时针转动,机器在两个盘刷的运行下,外加操作人施加一个向前的推力,机器开始向前方进行洗地工作,这时里程计算传感器(s6)上面的滚轮(k4)就会由于地面摩擦力的作用,开始向前滚动,当滚轮(k4)每转动一圈,(k4)上的里程计算传感器的触发器(k3)就会有一次机会和(k2)重合,从而使里程计算传感器的接收器(k2)的信号由低电平变化为高电平,整机控制系统(s1)检测到(k2)的信号发生了变化,变量trigger_count就会进行累加计数。
3.根据权利要求1所述的一种应用于手持洗地机器的运行里程计算方法,其特征在于,当操作人员按下整机控制系统(s1)上面的停止工作按键后,软件就会得到当前已经统计的电平变化的次数trigger_count的值,由此可计算出当前手持洗地机器的运行里程,计算公式:
4.根据权利要求1所述的一种应用于手持洗地机器的运行里程计算方法,其特征在于,当前已清扫的面积计算公式:
5.根据权利要求3和4所述的一种应用于手持洗地机器的运行里程计算方法,其特征在于,计算公式还可以根据不同型号、不同用途的洗地机器进行调整。
6.根据权利要求1所述的一种应用于手持洗地机器的运行里程计算方法,其特征在于,软件程序将上述计算出的当前运行里程l和当前已清扫的面积s,存储到内存,并上报给远程控制平台,方便用户或维护人员查阅,为机器日后的维护提供数据支撑。
技术总结
本发明公开了一种应用于手持洗地机器的运行里程计算方法,通过安装在手持洗地机器上的里程计算传感器收集数据,将收集到的数据输入到预先设定的计算公式中,计算出手持洗地机器的运行里程,进一步通过公式计算出已清扫的面积,并将计算结果存储在机器的内置存储器中,可供用户或维护人员查阅,如果需要,用户或维护人员还可以根据实际需要调整计算公式的参数,以获得更准确的里程和面积估算结果。本发明能够方便用户或维护人员随时查阅估算的里程数和已清扫面积,从而更好地了解机器的运行状况和使用效率。本发明能够降低实现洗地机器里程估算的设备成本,技术实现更简单,具有良好的实用性和广泛的应用前景。
技术研发人员:张贵禹
受保护的技术使用者:霞智科技有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!