被动式清洁设备及其清洁控制方法与计算机可读存储介质与流程
本技术涉及清洁,特别涉及一种被动式清洁设备的清洁控制方法、被动式清洁设备及非易失性计算机可读存储介质。
背景技术:
1、清洁设备主要用于辅助用户对地面进行清洁,通常应用于家庭室内清洁、大型场所清洁等场景。通常,清洁设备包括主动式被动式清洁设备和被动式清洁设备。主动式清洁设备通常叫做清洁机器人,该种设备能够自主控制对待清洁地面进行清洁,无需用户过多介入。而对于被动式清洁设备通常叫做手持式被动式清洁设备,包括洗地机、手持吸尘器等,这种被动式清洁设备需要用户手持该设备控制被动式清洁设备进行清洁,例如,用户将被动式清洁设备推到客厅或卧室进行地面清洁,该被动式清洁设备是由用户对其进行控制。
2、对于这种被动式清洁设备,在面对狭窄区域的污渍的情况下,通常需要用户通过反复的调整被动式清洁设备的姿态,手动调整被动式清洁设备的工作参数诸如此类的方式进行清理,往往在狭窄区域进行清洁花费时间较长,并且清洁效果不好,被动式清洁设备的此种设计,对于用户来说不够智能,进而增加了用户的操作负担。
技术实现思路
1、本技术实施方式提供了一种被动式清洁设备的清洁控制方法、被动式清洁设备及非易失性计算机可读存储介质,至少用于解决上述的被动式清洁设备不够智能的问题。
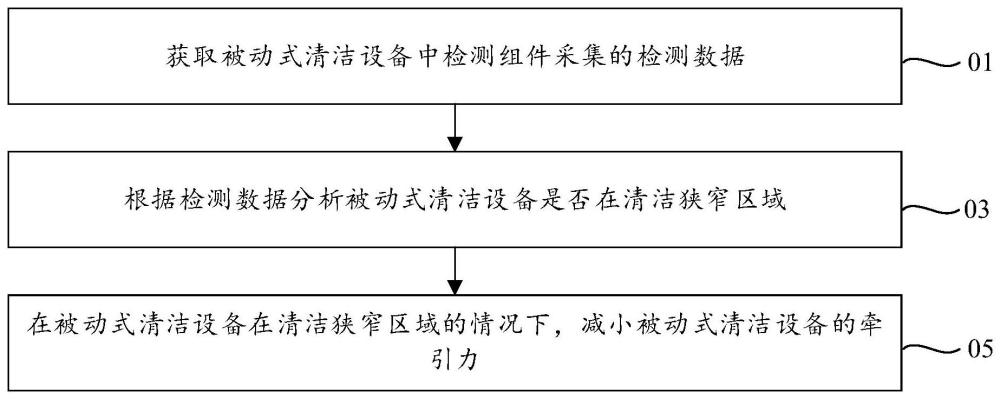
2、本技术实施方式的被动式清洁设备的清洁控制方法包括:获取所述被动式清洁设备中检测组件采集的检测数据;根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域;及在所述被动式清洁设备在清洁所述狭窄区域的情况下,减小所述被动式清洁设备的牵引力。
3、在某些实施方式中,所述检测数据包括:所述被动式清洁设备的姿态数据、运动参数数据、与参考物的相对位置数据及碰撞数据中的至少一种。
4、在某些实施方式中,所述被动式清洁设备包括底盘和可转动地设置于所述底盘的操作杆,所述检测数据包括所述操作杆的横滚角;所述根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域,包括:在所述操作杆的横滚角在预设的[x-a,x+b]的范围内往复变化的情况下,确定所述被动式清洁设备在清洁所述狭窄区域,其中,x是所述横滚角的基础值,a是所述横滚角的下浮量,b是所述横滚角的上浮量。
5、在某些实施方式中,所述被动式清洁设备包括底盘和可转动地设置于所述底盘的操作杆,所述检测数据包括所述操作杆的横滚角;所述根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域,包括:在所述操作杆的横滚角在预设的[x-m,x+n]的范围内往复变化,且所述操作杆的横滚角往复变化的频率大于或等于预设频率的情况下,确定所述被动式清洁设备在清洁所述狭窄区域,其中,x是所述横滚角的基础值,m是所述横滚角的下浮量,n是所述横滚角的上浮量。
6、在某些实施方式中,所述被动式清洁设备包括底盘,所述检测数据包括所述底盘与参考物之间的距离;所述根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域,包括:
7、在所述距离小于预设的第一距离阈值的情况下,确定所述被动式清洁设备在清洁所述狭窄区域。
8、在某些实施方式中,所述检测数据还包括所述底盘的运动速度;所述根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域,包括:在所述距离小于预设的第二距离阈值,且所述运动速度小于预设的速度阈值的情况下,确定所述被动式清洁设备在清洁所述狭窄区域。
9、在某些实施方式中,所述被动式清洁设备包括底盘,所述检测数据包括预设时长内所述底盘碰撞到环境中物体的碰撞次数;所述根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域,包括:在所述预设时长内,所述碰撞次数超过预设次数的情况下,确定所述被动式清洁设备在清洁所述狭窄区域。
10、在某些实施方式中,所述被动式清洁设备包括底盘和可转动地设置于所述底盘的操作杆,所述检测数据包括所述操作杆的仰俯角;所述根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域,包括:在所述操作杆的仰俯角大于预设的仰俯角阈值,且持续预定时长的情况下,确定所述被动式清洁设备在清洁所述狭窄区域。
11、在某些实施方式中,所述检测数据包括所述被动式清洁设备的周围环境的图像数据;所述根据所述检测数据分析所述被动式清洁设备是否在清洁狭窄区域,包括:识别所述图像数据中包含的物体;分析所述物体是否具有待清洁的狭窄区域;在所述图像数据中包含有待清洁的狭窄区域的情况下,分析形成所述狭窄区域的物体在所述图像数据中的占比;及在所述占比大于预设的占比阈值的情况下,确定所述被动式清洁设备在清洁所述狭窄区域。
12、在某些实施方式中,所述被动式清洁设备包括底盘,所述检测数据包括所述底盘与物体之间的距离;所述在所述占比大于预设的占比阈值的情况下,确定所述被动式清洁设备在清洁所述狭窄区域,包括:在所述占比大于预设的占比阈值,且所述距离小于预设的第三距离阈值的情况下,确定所述被动式清洁设备在清洁所述狭窄区域。
13、在某些实施方式中,所述被动式清洁设备包括底盘及设于所述底盘的用于清洁待清洁面的清洁组件,所述清洁组件包括设于底盘的清洁件及转动件,所述清洁件和所述转动件均能够相对所述底盘转动,以产生用于带动所述被动式清洁设备向前运动的驱动力,所述清洁件用于清扫脏污物;所述减小所述被动式清洁设备的牵引力,包括:驱动所述转动件向与所述清洁件的转动方向相反的方向转动。
14、在某些实施方式中,所述被动式清洁设备包括底盘及设于所述底盘的用于清洁待清洁面的清洁组件,所述清洁组件包括设于底盘的两个清洁件,所述清洁件能够相对所述底盘转动,以产生用于带动所述被动式清洁设备向前运动的驱动力,所述清洁件用于清扫脏污物;所述减小所述被动式清洁设备的牵引力,包括:驱动两个所述清洁件相向转动。
15、在某些实施方式中,所述被动式清洁设备包括底盘及设于所述底盘的用于清洁待清洁面的清洁组件,所述清洁组件包括设于底盘的清洁件,所述清洁件能够相对所述底盘转动,以产生用于带动所述被动式清洁设备向前运动的驱动力,所述清洁件用于清扫脏污物;所述清洁组件还包括设置于所述底盘的抬升组件;所述减小所述被动式清洁设备的牵引力,包括:所述抬升组件抬升所述清洁件。
16、本技术实施方式的被动式清洁设备包括底盘、操作杆、检测组件及安装于所述底盘或所述操作杆的一个或多个处理器。所述操作杆与所述底盘转动连接。所述检测组件设置于所述底盘和/或所述操作杆。一个或多个所述处理器用于执行上述任一实施方式所述的清洁控制方法。
17、本技术实施方式的非易失性计算机可读存储介质,存储有计算机程序,当所述计算机程序被一个或多个处理器执行时,实现上述任一实施方式所述的清洁控制方法。
18、本技术实施方式的被动式清洁设备的清洁控制方法、被动式清洁设备及计算机存储介质中,被动式清洁设备能够根据检测组件采集的检测数据分析被动式清洁设备是否在清洁狭窄区域的污渍,在被动式清洁设备在清洁狭窄区域的污渍的情况下,减小被动式清洁设备的牵引力,从而无需用户手动调整被动式清洁设备中部分部件的工作状态,以使得被动式清洁设备的运行状态更能使得清洁过程更加轻松,操作简单,减少了用户的操作步骤,提升用户体验,也提升了被动式清洁设备的智能属性。
19、本技术实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术实施方式的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!