一种自动清洁设备的制作方法
本发明涉及清洁机器人,具体而言,涉及一种自动清洁设备。
背景技术:
1、清洁机器人目前主要包括扫地机器人和拖地机器人两种,扫地机器人和拖地机器人的功能比较单一,要么只能进行扫地要么只能进行拖地。若想同时进行扫地和拖地则必须同时准备两套设备,占用双倍的空间。
2、现有技术中,也有将扫地机器人和拖地机器人结合,在机器人尾端增设拖布从而实现扫地拖地一体清扫,但该一体清扫中的拖地功能仅采用一块拖布在地面平移,随着拖布的平移,在清洁机器人移动轨迹中进行单次的拖地,拖地效果和效率都大打折扣,特别是对于一些污渍比较多,地面比较脏的环境,一次移动拖地显然不能将地面清洁干净。另外,自动清洁设备还存在其他问题,例如,清洁设备上的清洁组件无法进行升降调节,而是始终贴紧被清洁面,造成设备在不进行清洁工作时,在被清洁面上自由移动困难或者移动阻力大。
技术实现思路
1、本发明的目的在于提供一种自动清洁设备,能够解决地面不能清理干净的技术问题。具体方案如下:
2、根据本发明的具体实施方式,本发明提供一种自动清洁设备,包括:
3、移动平台100,被配置为在操作面上自动移动;
4、清洁模组150,设置于所述移动平台100上,包括:
5、湿式清洁模组400,被配置为采用湿式清洁方式清洁所述操作面的至少一部分;
6、其中,所述湿式清洁模组400包括:用于清洁所述操作面的清洁头410,以及,用于驱动所述清洁头410中的部分区域沿着目标面往复运动的驱动单元420,所述目标面为所述操作面的一部分。
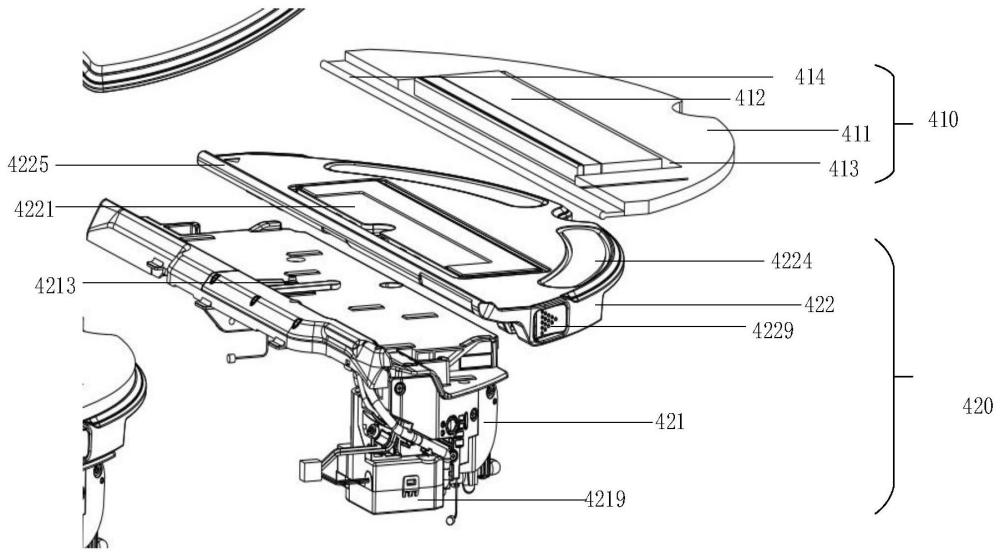
7、可选的,所述清洁头410包括:
8、固定区域411,配置为随着所述移动平台100的移动清洁所述操作面的至少一部分;
9、活动区域412,配置为在所述驱动单元的驱动下在与所述移动平台100移动方向大致垂直的方向上做基本上往复运动。
10、可选的,所述清洁头410还包括:柔性连接部(413),设置于所述固定区域411和所述活动区域412之间,连接所述固定区域(411)和所述活动区域(412)。
11、可选的,还包括:升降结构500,与所述湿式清洁模组400连接,被配置为能够使所述湿式清洁模组400相对于所述移动平台100上下移动。
12、可选的,所述升降结构500为平行四边形结构,包括:
13、第一连接端501,用于提供主动力使所述湿式清洁模组400在上升状态和下沉状态间切换;
14、第二连接端502,与所述第一连接端501相对设置,在所述主动力作用下旋转。
15、可选的,所述第一连接端501包括:第一支架5011,固定连接于所述移动平台100底部;所述第一支架5011包括:
16、横梁50111;
17、滑槽50112,沿所述横梁50111表面延伸,以及,
18、卡孔50113,贯穿所述横梁50111设置于所述滑槽50112延伸末端。
19、可选的,所述第一连接端501还包括:第一连接杆对5012,一端可转动地连接于所述移动平台100,另一端可转动地连接于所述湿式清洁模组400;所述第一连接杆对5012包括平行设置的第一连接杆50121和第二连接杆50122,所述第一连接杆50121和第二连接杆50122的第一端通过活动螺柱可转动地连接于所述移动平台100,所述第一连接杆50121和第二连接杆50122的第二端通过活动螺柱可转动地连接于所述湿式清洁模组400。
20、可选的,所述升降结构500还包括拉索42194,用于提供提拉动力,使所述第一连接杆对5012在预设角度内转动;所述拉索组件42194包括:
21、拉索电机端子50131,与所述驱动单元420相连接;拉索支架端子50132与所述第一支架5011相连接,所述电机通过所述拉索5013使所述第一连接杆50121和第二连接杆50122的第二端上升或下沉。
22、可选的,所述第二连接端502包括第二连接杆对5022,一端可转动地连接于所述移动平台100,另一端可转动地连接于所述湿式清洁模组400;所述第二连接杆对5022随着所述第一连接杆对5012的转动而转动。
23、可选的,所述第二连接杆对5022包括平行设置的第三连接杆50221和第四连接杆50222,所述第三连接杆50221和第四连接杆50222的第一端通过活动螺柱可转动地连接于所述移动平台100,所述第三连接杆50221和第四连接杆50222的第二端通过活动螺柱可转动地连接于所述湿式清洁模组400。
24、可选的,所述驱动单元420包括:
25、驱动平台421,连接于所述移动平台100,用于提供驱动力;
26、支撑平台422,连接于所述驱动平台421,用于支撑所述清洁头410。
27、可选的,所述驱动平台421包括:
28、驱动轮4212,与电机输出轴连接,所述驱动轮4212为非对称结构;
29、震动件4213,与所述驱动轮4212连接,在所述驱动轮4212非对称的转动下实现往复运动。
30、可选的,所述驱动平台421还包括:
31、连接杆4214,沿所述驱动平台421边缘延伸,连接所述驱动轮4212与所述震动件4213,使所述震动件4213延伸至预设位置。
32、可选的,所述驱动平台421还包括,震动缓冲装置4215,设置于所述连接杆4214上,用于减轻特定方向上的震动,其中,所述特定方向包括自动清洁设备目标方向垂直的移动分量方向。
33、可选的,所述支撑平台422包括:
34、清洁基板4221,活动的设置于所述支撑平台422,用于带着所述清洁头410的部分区域相对所述支撑平台422做基本上往复运动。
35、可选的,所述驱动平台421包括:
36、电机4211,设置于所述移动平台100,通过电机输出轴输出动力;
37、驱动轮4212,与所述电机输出轴连接,所述驱动轮4212为非对称结构,所述驱动轮4212用于驱动所述清洁基板运动。
38、可选的,所述支撑平台422还包括:
39、拆卸按钮4229,设置于所述支撑平台422的至少一侧,用于使所述支撑平台422可拆卸的连接于所述驱动平台421。
40、可选的,所述支撑平台422还包括:
41、至少一个装配区域4224,设置于所述支撑平台422,用于装配所述清洁头410。
42、可选的,所述清洁头410还包括:
43、滑动卡扣414,沿所述清洁头410边缘延伸,可拆卸的安装于所述支撑平台422。
44、与现有技术相比,本发明实施例具有如下的技术效果:
45、本发明提供的扫拖一体清洁设备,由于自动清洁设备的清洁模组设置有干式清洁模组和湿式清洁模组,能够提供更加全面的清洁功能。同时,在湿式清洁模组中,通过增加驱动单元、震动区域,使清洁头可以往复运动,从而可以在待清洁表面进行反复清洁,使得在清洁机器人运动轨迹中,一次通过某一区域可以实现多次清洁,从而大大增强了清洁效果,特别是对于污渍比较多的区域,清洁效果明显。
46、通过设置于清洁模组和移动平台之间的升降结构,能够使清洁模组相对于移动平台升降,在执行拖地任务的时候,将清洁模组降下使清洁模组与地面接触,当执行完毕拖地任务的时候,将清洁模组升起使清洁模组与地面分离,避免清洁设备在被清洁面上自由移动时由于清洁模组的存在而增大阻力。
- 还没有人留言评论。精彩留言会获得点赞!