一种基于Stm32智能扫地机器人
本发明涉及智能扫地机器人领域,特别的,是一种基于stm32智能扫地机器人。
背景技术:
1、随着人口老龄化的到来和人民对提升生活品质的需要, 人们对在现实生活场景中取代人力的服务机器人有着迫切的需要, 同时,机电、自动控制、计算机、传感器等技术的发展也为制造服务机器人提供了技术支持, 扫地机器人是服务机器人中技术最成熟和最为广泛使用的机器人,它可以自动的在室内行走,通过刷扫和吸尘将地面上的碎屑吸收进吸尘槽中,完成清洁地面的任务,有效的减少了人们清洁地面这种简单重复的家务劳动,节约了劳动力,提高了生活品质,由于,房间之间一般设有与地面会有一定的高度落差的门槛,用来挡风防尘,但是在机器人基于stm32智能控制下移动跨越门槛时,将会先以倾斜的状态攀升上门槛,会使得主机前侧的刷把出现空转运行的翘头情况,且其后侧直接抵触地面,导致主机的前进进程会受到拖拽而在门槛上短暂停滞住,造成门槛上的毛絮状灰尘卫生死角无法一次性清除,降低机器人的智能扫地能力。
技术实现思路
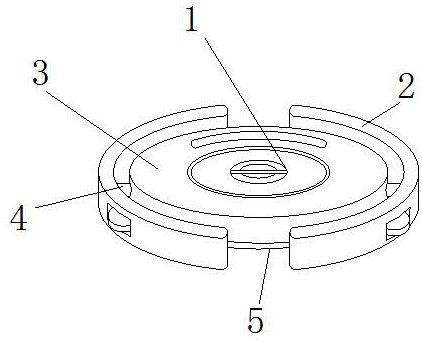
1、针对上述问题,本发明提供一种基于stm32智能扫地机器人,其结构包括主机、握把、防护罩、连杆、底盘,所述主机与底盘之间采用电性连接的方式相配合,且主机外部通过连杆固定连接有防护罩;
2、所述底盘包括移动轮、清扫结构、吸尘槽、感应盘体、越障组件,所述移动轮滚动配合在感应盘体下方,且移动轮内侧安装有越障组件,所述感应盘体底部设有两个清扫结构,且感应盘体开设有吸尘槽。
3、作为本发明的进一步改进,所述清扫结构包括转盘、薄刃、定向件、对接头、刷把,所述转盘转动配合在感应盘体下方,且转盘外部固定连接有对接头,所述对接头通过定向件安装有刷把,所述刷把两侧铰接连接有薄刃。
4、作为本发明的进一步改进,所述定向件包括半弧罩板、衔接套、圆杆、磨合层、转轴,所述半弧罩板和转轴固定连接在衔接套内部,且半弧罩板内部通过磨合层套接连接有圆杆,所述圆杆过盈配合在刷把和薄刃上方。
5、作为本发明的进一步改进,所述磨合层为褶皱结构,其内部滚动配合有圆杆,且磨合层过盈配合在刷把和薄刃上方,能在衔接套内部限制刷把和薄刃的摆动方向。
6、作为本发明的进一步改进,所述越障组件包括支杆、连轴、磨合层、跨越辊、固定环,所述支杆通过连轴和跨越辊活动卡合在感应盘体内部,且支杆一端通过固定环固定连接在移动轮内部,所述支杆另一端安装有跨越辊。
7、作为本发明的进一步改进,所述跨越辊包括外置环、穿孔、轮子、轴承、支撑件,所述外置环固定连接在轮子外部,且外置环通过穿孔安装有四个支撑件,所述轮子内部焊接连接有轴承,且通过轴承转动配合于支杆另一端。
8、作为本发明的进一步改进,所述支撑件包括弯折板、弹弓、串联杆、护板、交叉把,所述弯折板固定连接在串联杆和交叉把之间,且弯折板活动卡合在外置环之间,所述串联杆顶部焊接连接有弹弓,所述交叉把一端滑动配合在护板内部。
9、作为本发明的进一步改进,所述弹弓为形结构,过盈配合在轮子内壁,且弹弓两端与弯折板间隙配合,能与弯折的弯折板卡合在轮子内壁,并向外蓄力推挤出护板。
10、有益效果
11、与现有技术相比,本发明的有益效果:
12、本发明利用底盘的清扫结构和越障组件,当感应盘体基于stm32的智能控制下借助移动轮要攀升跨越上门槛时,感应盘体前侧的清扫结构将会顺势定向的收合下垂至门槛上,对门槛的毛絮状灰尘卫生死角进行有效的一次清洁清洁和改变主机的重心位置,能助力移动轮带动感应盘体前进,使得移动轮前后受力势能不一,会蓄力向后方释放越障组件,便于越障组件同步转动着扩圈抵触在地面,并一定高度的弹性牵引感应盘体后侧前移,更好的提高主机的前进对门槛流畅程度和清洁效果,确保机器人的智能扫地能力。
13、本发明由于半弧罩板为二分之一的锥台状结构,越往外开口越小,能单向限定和推挤刷把和薄刃的摆动方向,使得刷把和薄刃能受重力调动而摆动下垂至地面,进行有效清洁和改变主机的重心位置。
14、本发明通过跨越辊内部设有四个支撑件,能在主机倾斜跨上门槛时,借助支杆和连轴释放跨越辊的四个支撑件,让支撑件随之能向外延伸。
技术特征:
1.一种基于stm32智能扫地机器人,其特征在于:其结构包括主机(3)、握把(1)、防护罩(2)、连杆(4)、底盘(5),所述主机(3)与底盘(5)之间采用电性连接的方式相配合,且主机(3)外部通过连杆(4)固定连接有防护罩(2);
2.根据权利要求1所述的一种基于stm32智能扫地机器人,其特征在于:所述清扫结构(5w)包括转盘(w1)、薄刃(w5)、定向件(w2)、对接头(w3)、刷把(w4),所述转盘(w1)转动配合在感应盘体(5r)下方,且转盘(w1)外部固定连接有对接头(w3),所述对接头(w3)通过定向件(w2)安装有刷把(w4),所述刷把(w4)两侧铰接连接有薄刃(w5)。
3.根据权利要求2所述的一种基于stm32智能扫地机器人,其特征在于:所述定向件(w2)包括半弧罩板(w21)、衔接套(w22)、圆杆(w23)、磨合层(w24)、转轴(w25),所述半弧罩板(w21)和转轴(w25)固定连接在衔接套(w22)内部,且半弧罩板(w21)内部通过磨合层(w24)套接连接有圆杆(w23),所述圆杆(w23)过盈配合在刷把(w4)和薄刃(w5)上方。
4.根据权利要求3所述的一种基于stm32智能扫地机器人,其特征在于:所述磨合层(w24)内部滚动配合有圆杆(w23),且磨合层(w24)过盈配合在刷把(w4)和薄刃(w5)上方。
5.根据权利要求1所述的一种基于stm32智能扫地机器人,其特征在于:所述越障组件(5t)包括支杆(t2)、连轴(t3)、磨合层(t4)、跨越辊(t1)、固定环(t5),所述支杆(t2)通过连轴(t3)和跨越辊(t1)活动卡合在感应盘体(5r)内部,且支杆(t2)一端通过固定环(t5)固定连接在移动轮(5q)内部,所述支杆(t2)另一端安装有跨越辊(t1)。
6.根据权利要求5所述的一种基于stm32智能扫地机器人,其特征在于:所述跨越辊(t1)包括外置环(t11)、穿孔(t15)、轮子(t12)、轴承(t13)、支撑件(t14),所述外置环(t11)固定连接在轮子(t12)外部,且外置环(t11)通过穿孔(t15)安装有四个支撑件(t14),所述轮子(t12)内部焊接连接有轴承(t13),且通过轴承(t13)转动配合于支杆(t2)另一端。
7.根据权利要求6所述的一种基于stm32智能扫地机器人,其特征在于:所述支撑件(t14)包括弯折板(14z)、弹弓(14x)、串联杆(14c)、护板(14v)、交叉把(14b),所述弯折板(14z)固定连接在串联杆(14c)和交叉把(14b)之间,且弯折板(14z)活动卡合在外置环(t11)之间,所述串联杆(14c)顶部焊接连接有弹弓(14x),所述交叉把(14b)一端滑动配合在护板(14v)内部。
8.根据权利要求7所述的一种基于stm32智能扫地机器人,其特征在于:所述弹弓(14x)过盈配合在轮子(t12)内壁,且弹弓(14x)两端与弯折板(14z)间隙配合。
技术总结
本发明公开了一种基于Stm32智能扫地机器人,其结构包括主机、握把、防护罩、连杆、底盘,主机与底盘之间采用电性连接的方式相配合,且主机外部通过连杆固定连接有防护罩;利用底盘的清扫结构和越障组件,当感应盘体基于Stm32的智能控制下借助移动轮要攀升跨越上门槛时,感应盘体前侧的清扫结构将会顺势定向的收合下垂至门槛上,对门槛的毛絮状灰尘卫生死角进行有效的一次清洁清洁和改变主机的重心位置,能助力移动轮带动感应盘体前进,使得移动轮前后受力势能不一,会蓄力向后方释放越障组件,便于越障组件同步转动着扩圈抵触在地面,并一定高度的弹性牵引感应盘体后侧前移,更好的提高主机的前进对门槛流畅程度和清洁效果,确保机器人的智能扫地能力。
技术研发人员:闫淑梅,周旭航
受保护的技术使用者:长沙环境保护职业技术学院
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!