一种清扫方法、装置、设备及存储介质与流程
本技术涉及清扫领域,尤其涉及一种清扫方法、装置、设备及存储介质。
背景技术:
1、现有的清洁设备在需要执行清洁任务清洁一个区域时,通常会根据区域的边界、障碍物等情况生成清洁的规划路线,例如一种规划路线为先对区域进行回字形贴边清扫,然后再对回字形区域内部进行清扫。然而,当清扫区域突然出现新的障碍物时,由于现有清洁设备只能按照事先生成的规划路线行走,当新的障碍物对规划路线产生阻碍时,清洁设备只会不断地在新的障碍物前转圈,导致清扫无法进行下去,影响清洁效果。
技术实现思路
1、本技术实施例提供一种清扫方法、装置、设备及存储介质,以解决相关技术存在的至少一个问题,技术方案如下:
2、第一方面,本技术实施例提供了一种清扫的方法,包括:
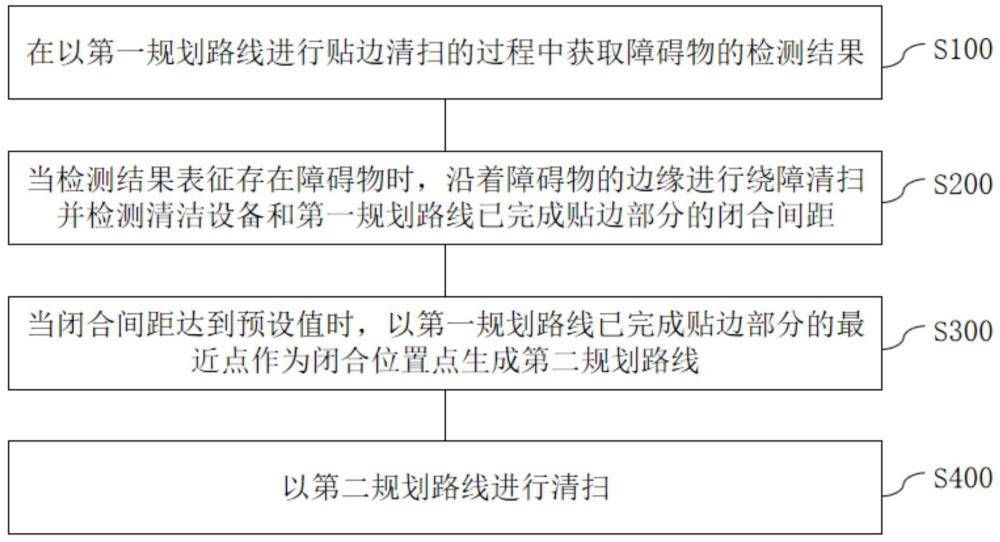
3、在以第一规划路线进行贴边清扫的过程中获取障碍物的检测结果;
4、当所述检测结果表征存在障碍物时,沿着障碍物的边缘进行绕障清扫并检测清洁设备和所述第一规划路线已完成贴边部分的闭合间距;
5、当所述闭合间距达到预设值时,以所述第一规划路线已完成贴边部分的最近点作为闭合位置点生成第二规划路线;
6、以所述第二规划路线进行清扫。
7、在一种实施方式中,所述检测所述清洁设备和所述第一规划路线已完成贴边部分的闭合间距包括:
8、在所述第一规划路线已完成贴边部分中,滤除所述清洁设备刚行驶完的预设长度或者预设时间内的部分,得到剩余部分;
9、检测所述清洁设备当前位置与所述剩余部分中的最近点的距离。
10、在一种实施方式中,所述以所述第二规划路线进行清扫的步骤包括:
11、沿着所述清洁设备当前位置至所述闭合位置点之间的贴边路线完成贴边清扫;
12、对所述第二规划路线的贴边路线围绕的部分进行覆盖清扫,所述第二规划路线的贴边路线包括所述第一规划路线贴边路线自所述闭合位置点至所述清洁设备遇到障碍物的位置之间的部分,沿着障碍物的边缘进行绕障清扫的部分和自清洁设备当前位置到所述闭合位置点的部分。
13、在一种实施方式中,所述方法还包括:
14、当所述闭合间距未达到预设值时,在沿着障碍物的边缘进行绕障清扫并绕开障碍物后继续以所述第一规划路线完成贴边清扫;
15、在完成所述贴边清扫后,以所述第一规划路线进行覆盖清扫。
16、在一种实施方式中,所述方法还包括:
17、在完成所述第二规划路线的清扫后获取障碍物的第一检测结果;
18、当所述第一检测结果表征存在障碍物时,执行指定动作。
19、在一种实施方式中,所述执行指定动作包括:
20、停止清扫并发送提醒信息;
21、或者,
22、获取所述障碍物的图像,将所述图像发送至用户终端,响应于用户终端生成的控制指令,停止清扫;
23、或者,
24、撞击所述障碍物并获取所述障碍物的第二检测结果,当所述第二检测结果不满足障碍条件时,根据所述第一规划路线对应的第一清扫区域以及所述第二规划路线对应的第二清扫区域,确定剩余清扫区域,根据所述剩余清扫区域生成第三规划路线并以所述第三规划路线进行清扫;
25、或者,
26、停止清扫并发送提醒信息,并在停止清扫并发送提醒信息后间隔预设时间获取所述障碍物的第三检测结果,当所述第三检测结果不满足所述障碍条件时,根据所述第一规划路线对应的第一清扫区域以及所述第二规划路线对应的第二清扫区域,确定剩余清扫区域,根据所述剩余清扫区域生成第三规划路线并以所述第三规划路线进行清扫;
27、其中,所述第三规划路线包括对所述剩余清扫区域进行贴边清扫的路线以及对所述剩余清扫区域进行覆盖清扫的路线,所述障碍条件为障碍物阻挡所述清洁设备继续完成所述第一规划路线。
28、在一种实施方式中,所述方法还包括:
29、当所述第一检测结果表征不存在障碍物时,根据所述第一规划路线对应的第一清扫区域以及所述第二规划路线对应的第二清扫区域,确定剩余清扫区域;
30、根据所述剩余清扫区域生成第三规划路线,以所述第三规划路线进行清扫;
31、其中,所述第三规划路线包括对所述剩余清扫区域进行贴边清扫的路线以及对所述剩余清扫区域进行覆盖清扫的路线。
32、第二方面,本技术实施例提供了一种清扫装置,包括:
33、获取模块,用于在以第一规划路线进行贴边清扫的过程中获取障碍物的检测结果;
34、检测模块,当所述检测结果表征存在障碍物时,沿着障碍物的边缘进行绕障清扫并检测清洁设备和所述第一规划路线已完成贴边部分的闭合间距;
35、生成模块,用于当所述闭合间距达到预设值时,以所述第一规划路线已完成贴边部分的最近点作为闭合位置点生成第二规划路线;
36、清扫模块,用于以所述第二规划路线进行清扫。
37、在一些实施方式中,清扫模块还用于:
38、当所述闭合间距未达到预设值时,在沿着障碍物的边缘进行绕障清扫并绕开障碍物后继续以所述第一规划路线完成贴边清扫;
39、在完成所述贴边清扫后,以所述第一规划路线进行覆盖清扫。
40、在一些实施方式中,清扫模块还用于:
41、在完成所述第二规划路线的清扫后获取障碍物的第一检测结果;
42、当所述第一检测结果表征存在障碍物时,执行指定动作。
43、在一些实施方式中,清扫模块还用于:
44、当所述第一检测结果表征不存在障碍物时,根据所述第一规划路线对应的第一清扫区域以及所述第二规划路线对应的第二清扫区域,确定剩余清扫区域;
45、根据所述剩余清扫区域生成第三规划路线,以所述第三规划路线进行清扫;
46、其中,所述第三规划路线包括对所述剩余清扫区域进行贴边清扫的路线以及对所述剩余清扫区域进行覆盖清扫的路线。
47、第三方面,本技术实施例提供了一种电子设备,包括:处理器和存储器,该存储器中存储指令,该指令由该处理器加载并执行,以实现上述各方面任一种实施方式中的方法。
48、第四方面,本技术实施例提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被执行时实现上述各方面任一种实施方式中的方法。
49、上述技术方案中的有益效果至少包括:
50、通过在以第一规划路线进行贴边清扫的过程中获取障碍物的检测结果,当检测结果表征存在障碍物时,沿着障碍物的边缘进行绕障清扫并检测清洁设备和第一规划路线已完成贴边部分的闭合间距,当闭合间距达到预设值时,以第一规划路线已完成贴边部分的最近点作为闭合位置点生成第二规划路线,即使出现新的障碍物,并且在绕障碍物清扫后仍然无法通过障碍物时,也能够生成第二规划路线进行清扫,先完成部分清扫,相对现有方案清洁设备因无法绕过障碍物完成第一规划路线的贴边清扫,而在障碍物处不断转圈的方式,能够提高清洁效果。
51、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本技术进一步的方面、实施方式和特征将会是容易明白的。
- 还没有人留言评论。精彩留言会获得点赞!