清洁设备的清洁控制方法、装置、清洁设备及介质与流程
本发明涉及家电设备,具体涉及清洁设备的清洁控制方法、装置、清洁设备及介质。
背景技术:
1、清洁机器人等清洁设备经过多年更新迭代,目前已进入扫拖一体式、基站清洗、基站集尘的模式。在扫地功能已基本完善的情况下,如何让拖地功能更好地贴合用户需求,成为各厂商聚焦的重点。
2、目前主流拖地方案采用双滚轮拖布或双圆盘拖布,也有少量使用传统整块拖地的设备。拖布可通过基站水洗、水箱加水的方式来补充湿度,也可以通过调整拖布加压来确定是否进入拖地模式。
3、然而,目前清洁设备的拖地方案存在模式设定单一、水量调节粗糙、智能化程度不高等问题,并不能通过清洁设备智能拖地为用户提供更舒适的生活环境。
技术实现思路
1、有鉴于此,本发明提供了一种清洁设备的清洁控制方法、装置、清洁设备及介质,以解决目前清洁设备模式单一、控制不精确的问题。
2、第一方面,本发明提供了一种清洁设备的清洁控制方法,清洁设备包括:基站和清洁机器人,该方法包括:
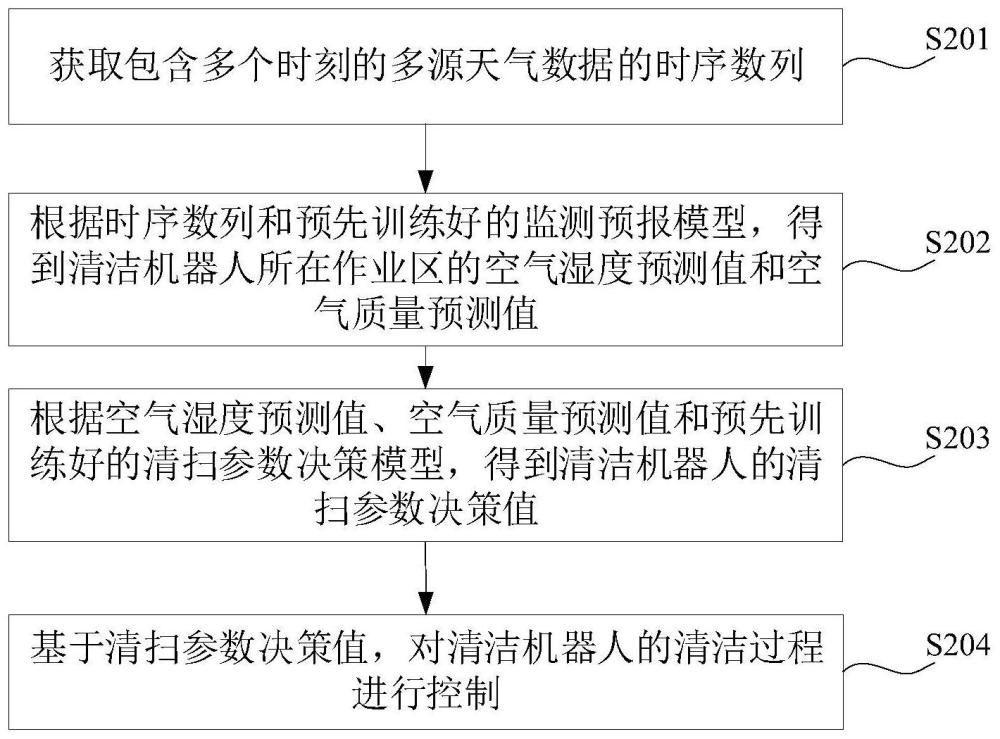
3、获取包含多个时刻的多源天气数据的时序数列;多源天气数据包括基站端采集的空气湿度和空气质量、清洁机器人端采集的空气湿度和空气质量以及云端采集的清洁设备所在区域的空气湿度和空气质量;
4、根据时序数列和预先训练好的监测预报模型,得到清洁机器人所在作业区的空气湿度预测值和空气质量预测值;
5、根据空气湿度预测值、空气质量预测值和预先训练好的清扫参数决策模型,得到清洁机器人的清扫参数决策值;
6、基于清扫参数决策值,对清洁机器人的清洁过程进行控制。
7、从而通过基于包含多个时刻的基站端、清洁机器人端和云端天气数据的时序数列,通过预先训练好的监测预报模型,对清洁机器人所在作业区的空气湿度预测值和空气质量预测值进行预测,鲁棒性强且性能稳定,最后基于空气湿度预测值和空气质量预测值通过预先训练好的清扫参数决策模型确定清扫参数,根据清扫参数对清洁机器人的清洁过程进行控制,从而使清洁机器人的水箱出水量和拖布压力更加符合清洁机器人所在作业区的环境,为用户提供更舒适的生活环境。
8、在一种可选的实施方式中,根据时序数列和预先训练好的监测预报模型,得到清洁机器人所在作业区的空气湿度预测值和空气质量预测值,包括:
9、随机产生与时序数列的数据结构相同的随机噪声序列,对时序数列和随机噪声序列分别进行位置编码,得到时序数列对应的第一位置信息和随机噪声序列对应的第二位置信息;
10、将与第一位置信息拼接后的时序数列输入预先训练好的监测预报模型中的编码器进行编码,得到编码结果;
11、将编码结果以及与第二位置信息拼接后的随机噪声序列输入监测预报模型中的解码器,得到目标解码结果;
12、对目标解码结果进行线性降维,得到清洁机器人所在作业区的空气湿度预测值和空气质量预测值。
13、从而通过将时序数列与对应的随机噪声序列进行位置编码,增强模型对时序数据的处理能力,然后将融合有位置编码的时序数列和随机噪声序列输入监测预报模型进行编码与解码得到目标解码结果,最后将目标解码结果进行线性降维,对清洁机器人所在作业区的空气湿度和空气质量进行预测,以便于后续结合清洁机器人作业区的环境对清洁机器人的清洁参数进行调整。
14、在一种可选的实施方式中,解码器包括第一多头注意力模块、第二多头注意力模块和全连接的前馈映射模块;将编码结果以及与第二位置信息拼接后的随机噪声序列输入监测预报模型中的解码器,得到目标解码结果,包括:
15、将编码结果输入第一多头注意力模块,得到第一解码结果;
16、将与第二位置信息拼接后的随机噪声序列输入第二多头注意力模块,得到第二解码结果;
17、将第一解码结果和第二解码结果输入全连接的前馈映射模块,得到目标解码结果。
18、从而通过将结合了位置编码信息的随机噪声序列与时序数列的解码结果进行融合,提高目标解码结果的准确度。
19、在一种可选的实施方式中,清扫参数决策模型为决策树模型,清扫参数决策模型是基于预先获取的清扫参数数据集训练得到的;其中,清扫参数数据集包括在不同空气湿度和不同空气质量下清洁机器人的水箱出水量和拖布压力。
20、在一种可选的实施方式中,清扫参数决策值包括在空气湿度预测值和空气质量预测值下,清洁机器人的目标水箱出水量和目标拖布压力;
21、基于清扫参数决策值,对清洁机器人的清洁过程进行控制,包括:
22、基于目标水箱出水量和目标拖布压力,对清洁机器人的清洁过程进行控制。
23、从而通过按照目标水箱出水量和目标拖布压力实时控制清洁机器人的水箱出水量和拖布压力,确保清洁机器人的清洁过程可控,使清洁机器人的清洁过程更加符合清洁机器人所在作业区的环境,从而为用户提供更舒适的生活环境。
24、在一种可选的实施方式中,该方法还包括:
25、基于空气湿度预测值和空气质量预测值,判断清洁机器人所在作业区的天气是否为预设的特殊情景;
26、在确定清洁机器人所在作业区的天气为预设的特殊情景后,控制清洁机器人按照预设的特殊情景模式进行清洁。
27、从而通过基于空气湿度预测值和空气质量预测值确定清洁机器人所在作业区的天气为预设的特殊情景后,控制清洁机器人按照预设的特殊情景模式进行清洁,简化了清扫参数的决策过程,更便捷高效地为用户提供更舒适的生活环境,提高了用户体验。
28、第二方面,本发明提供了一种清洁设备的清洁控制装置,清洁设备包括:基站和清洁机器人,该装置包括:
29、获取模块,用于获取包含多个时刻的多源天气数据的时序数列;多源天气数据包括基站端采集的空气湿度和空气质量、清洁机器人端采集的空气湿度和空气质量以及云端采集的清洁设备所在区域的空气湿度和空气质量;
30、第一处理模块,用于根据时序数列和预先训练好的监测预报模型,得到清洁机器人所在作业区的空气湿度预测值和空气质量预测值;
31、第二处理模块,用于根据空气湿度预测值、空气质量预测值和预先训练好的清扫参数决策模型,得到清洁机器人的清扫参数决策值;
32、第三处理模块,用于基于清扫参数决策值,对清洁机器人的清洁过程进行控制。
33、第三方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的清洁设备的清洁控制方法。
34、第四方面,本发明提供了一种清洁设备,清洁设备包括基站和清洁机器人,清洁机器人包括水箱、拖布和控制器,控制器包括存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的清洁设备的清洁控制方法。
35、在一种可选的实施方式中,清洁机器人为扫地机器人。
技术特征:
1.一种清洁设备的清洁控制方法,所述清洁设备包括:基站和清洁机器人,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述时序数列和预先训练好的监测预报模型,得到清洁机器人所在作业区的空气湿度预测值和空气质量预测值,包括:
3.根据权利要求2所述的方法,其特征在于,所述解码器包括第一多头注意力模块、第二多头注意力模块和全连接的前馈映射模块;所述将所述编码结果以及与所述第二位置信息拼接后的随机噪声序列输入所述监测预报模型中的解码器,得到目标解码结果,包括:
4.根据权利要求1所述的方法,其特征在于,所述清扫参数决策模型为决策树模型,所述清扫参数决策模型是基于预先获取的清扫参数数据集训练得到的;其中,所述清扫参数数据集包括在不同空气湿度和不同空气质量下所述清洁机器人的水箱出水量和拖布压力。
5.根据权利要求4所述的方法,其特征在于,所述清扫参数决策值包括在所述空气湿度预测值和所述空气质量预测值下,所述清洁机器人的目标水箱出水量和目标拖布压力;
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.一种清洁设备的清洁控制装置,所述清洁设备包括:基站和清洁机器人,其特征在于,所述装置包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至6中任一项所述的清洁设备的清洁控制方法。
9.一种清洁设备,其特征在于,所述清洁设备包括基站和清洁机器人,所述清洁机器人包括水箱、拖布和控制器;
10.根据权利要求9所述的清洁设备,其特征在于,所述清洁机器人为扫地机器人。
技术总结
本发明涉及家电设备技术领域,公开了清洁设备的清洁控制方法、装置、清洁设备及介质,本发明通过基于包含多个时刻的基站端、清洁机器人端和云端天气数据的时序数列,通过预先训练好的监测预报模型对清洁机器人所在作业区的空气湿度预测值和空气质量预测值进行预测,鲁棒性强且性能稳定,最后基于空气湿度预测值和空气质量预测值通过预先训练好的清扫参数决策模型确定清扫参数,根据清扫参数对清洁机器人的清洁过程进行控制,从而使清洁机器人的水箱出水量和拖布压力更加符合清洁机器人所在作业区的环境,为用户提供更舒适的生活环境。
技术研发人员:张詠钦,马磊,龚辉平,王志奎
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!