一种玻璃清洁机器人
本技术属玻璃清洁装置,具体涉及一种玻璃清洁机器人。
背景技术:
1、玻璃幕墙是当今世界最重要的装饰材料之一,已经被广泛地作为各类建筑物的户外墙体来使用,其赋予建筑物的最大特点是将建筑美学、建筑功能、建筑节能和建筑结构等因素有机地统一起来,使建筑物能够从不同角度呈现出不同的色调,随阳光、月色、灯光的变化给人以动态的美。由于空气中的粉尘、雨水中所夹带的灰尘、飞禽的排泄物等会逐渐地沉积到建筑物的幕墙表面,从而影响幕墙的美观性及建筑物外表的清洁程度;因此,对玻璃幕墙的清洁已经越来越受到人们的关注并逐渐形成了巨大的幕墙清洗市场。
2、目前,市面上虽然出现了一些能够对玻璃幕墙进行自动清洗的清洁机器人,然而存在实用性较差、使用成本高、清洗效果差等缺陷,而从事这种清洁工作的人员一般被称为“蜘蛛人”,清洁工作危险性极高,而且由于只能进行定期的集中作业,导致幕墙的清洁成本极高,且清洁后的幕墙的清洁度维持时间较短。因此,有必要研发一种实用性强、清洁效果好的玻璃清洁机器人。
技术实现思路
1、为了解决上述技术问题,本实用新型提供了一种玻璃清洁机器人。
2、本实用新型的一种玻璃清洁机器人的技术方案是:
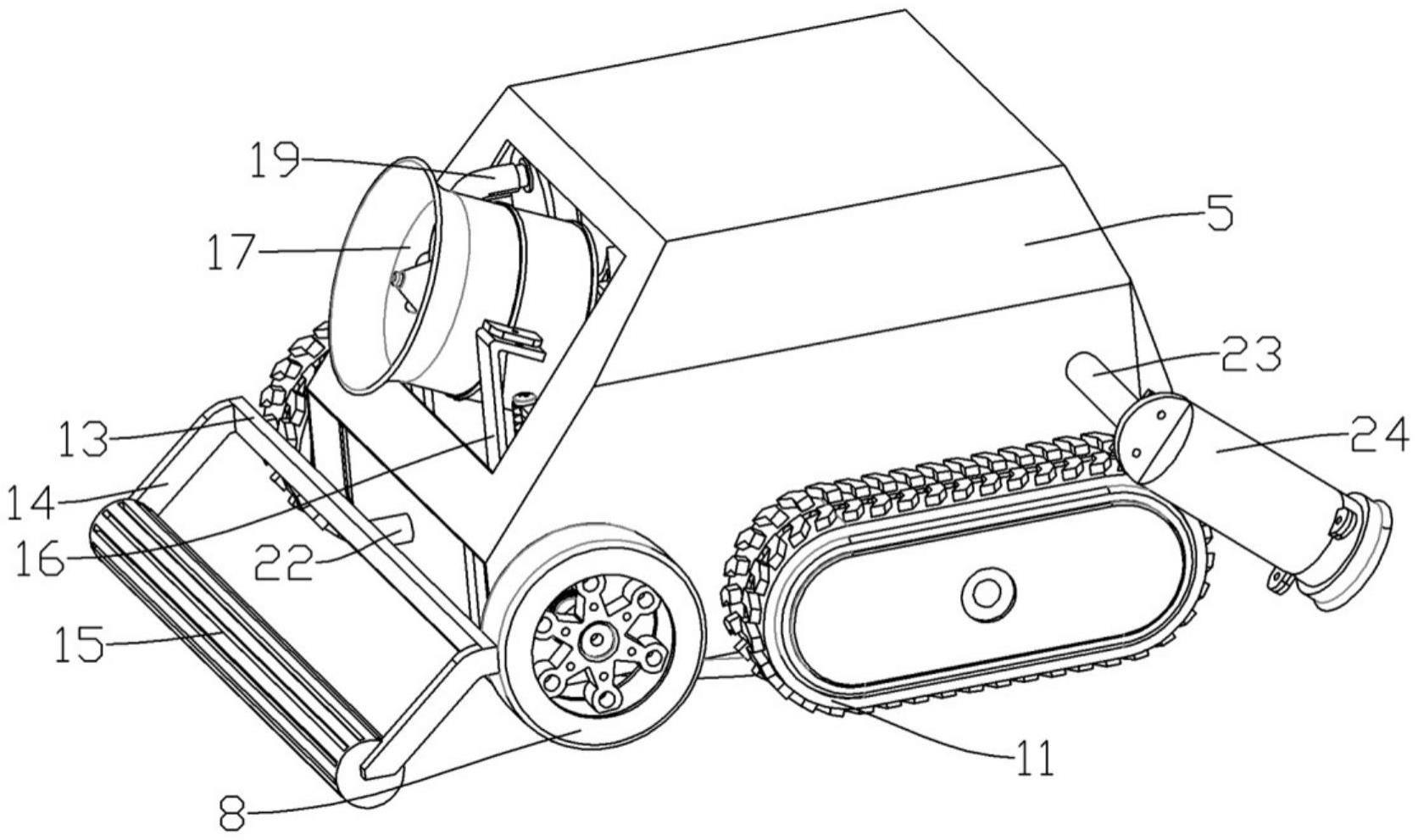
3、一种玻璃清洁机器人,包括机架,所述机架的前后两侧分别转动安装有履带组件以及行走轮,所述机架上设有驱动所述履带组件行走的第一驱动机构,所述机架上转动安装有轴线沿前后方向延伸的转轴,所述机架上设有驱动所述转轴转动的第二驱动机构,所述转轴的两端分别设有气爪,所述机架的下侧设有吸盘,所述机架上设真空泵,所述真空泵的进气口与所述吸盘通过连接管连接,所述机架上设有为所述玻璃清洁机器人提供斜下方推进力的推进风扇,所述机架的右侧通过支架安装有清扫辊,所述清扫辊的轴线沿前后方向延伸,所述机架的下侧面左端设有清扫球。
4、作为对上述技术方案的进一步改进,所述机架包括上下平行间隔布置的顶板以及底板,所述顶板前侧右端以及所述底板后侧左端分别设有折弯部,所述顶板前侧左端以及所述底板前侧右端分别设有l形的连接板,所述连接板的水平部固定连接在所述顶板下侧面上,所述行走轮具有两个,两个所述行走轮分别转动安装在所述折弯部的外侧面上,所述履带组件包括主动履带轮、从动履带轮以及履带,所述主动履带轮以及从动履带轮转动安装在所述连接板的外侧面上,所述履带环绕在所述主动履带轮与所述从动履带轮之间。
5、作为对上述技术方案的进一步改进,所述顶板的右端设有竖直向下延伸的折弯板,所述支架包括连接杆以及一体连接在所述连接杆两端的端杆,所述端杆向斜下方延伸,所述清扫辊通过轴承转动安装在两个所述端杆之间,所述连接杆的中间位置通过固定柱固定连接在所述折弯板的右侧面上。
6、作为对上述技术方案的进一步改进,所述底板的左侧面上端安装有两个第一舵机,两个所述舵机前后间隔布置,所述底板上设有供所述第一舵机的输出轴穿出的穿孔,所述清扫球固定连接在所述第一舵机的输出轴端部。
7、作为对上述技术方案的进一步改进,所述机架包括罩壳,所述罩壳固定连接在所述顶板上,所述罩壳罩上设有观察窗。
8、作为对上述技术方案的进一步改进,所述第一驱动机构包括第二舵机,所述第二舵机固定连接在所述连接板的竖直部内侧,所述第二舵机的转轴与所述主动履带轮固定连接。
9、作为对上述技术方案的进一步改进,所述底板的中心位置设有圆形的通孔,所述吸盘呈喇叭状,所述吸盘位于所述通孔内,所述吸盘的下端位于所述底板下侧,所述吸盘上设有安装套,所述吸盘上套装有弹簧,所述弹簧的下端与所述安装套抵接,所述弹簧的上端与所述顶板抵接,所述吸盘的上端通过固定套固定连接在所述顶板上,所述真空泵固定连接在所述顶板上。
10、作为对上述技术方案的进一步改进,所述转轴通过安装座转动安装在所述顶板上,所述第二驱动机构包括第三舵机、主动齿轮以及从动齿轮,所述第三舵机通过固定座固定连接在所述顶板上,所述主动齿轮固定连接在所述第三舵机的输出轴端部,所述从动齿轮同轴固定连接在所述转轴上。
11、作为对上述技术方案的进一步改进,所述气爪包括固定筒、抽气泵以及吸附罩,所述固定筒的上端与所述转轴固定连接,所述吸附罩安装在所述固定筒下端,所述抽气泵位于所述固定筒内,所述抽气泵的进气孔通过连接管与所述吸附罩连通,所述连接管上设有进气阀。
12、作为对上述技术方案的进一步改进,所述推进风扇通过支架固定连接在所述顶板上,所述推进风扇的转轴的轴线朝右上方延伸。
13、本实用新型提供了一种玻璃清洁机器人,相比于现有技术,其有益效果在于:
14、本实用新型的玻璃清洁机器人启动后,遇到墙壁,机器人会进入自身调整状态,这个过程中机器人的结构会有一定的变化,主动齿轮在第三舵机的作用下,与从动齿轮转动,在此齿轮结构中,主动齿轮与从动齿轮力矩之比为3:5。从而带动气爪发生转动。使气爪的硅胶材料的吸附罩与墙壁充分接触,形成硅胶密封,便于吸附。接着,抽气泵开始工作,使气爪牢牢的吸附在墙面上。之后主动齿轮在第三舵机的作用下,与从动齿轮转动,同时气爪也进行转动,从而带动机器人掀起,同第二舵机驱动时履带与行走轮转动,使机器人贴近墙面。重复操作,直至小车贴附墙面。此刻抽气泵开始工作,通过连接管使吸盘空气逐渐减少,形成类似于真空状态。利用真空负压原理,给机器人提高吸附力。同时气爪和推进风扇配合机器人工作,分别提供吸附力和向上的推力,帮助机器人完成顺利到达工作区域,并牢牢的吸附在玻璃面,顺利完成各种清洁工作。接着,清扫辊便开始工作,清洁机器人途径的玻璃区域;当遇到难以清理的污渍时,第一舵机驱动清扫球转动,便可辅助完成清洁。本实用新型的玻璃清洁机器人通过设置气爪和推进风扇,可以给机器人提供向墙面倾斜的向下的推力。气爪和推进风扇配合,保证机器人在进行清洁任务的过程中能牢牢吸附在玻璃面,大大提高安全性。清扫球与清扫辊配合进行清洁,保证清洁任务高效快速的完成。机器人可通过履带和行走轮完成在墙面上的前进和后退的运动,通过履带和行走轮不同速度,通过差动转向方式实现机器的转弯与旋转。相比于现有技术中的玻璃清洁机器人,本实用新型的玻璃清洁机器人实用性强,清洁效果好。
技术特征:
1.一种玻璃清洁机器人,其特征在于,包括机架,所述机架的前后两侧分别转动安装有履带组件以及行走轮,所述机架上设有驱动所述履带组件行走的第一驱动机构,所述机架上转动安装有轴线沿前后方向延伸的转轴,所述机架上设有驱动所述转轴转动的第二驱动机构,所述转轴的两端分别设有气爪,所述机架的下侧设有吸盘,所述机架上设真空泵,所述真空泵的进气口与所述吸盘通过连接管连接,所述机架上设有为所述玻璃清洁机器人提供斜下方推进力的推进风扇,所述机架的右侧通过支架安装有清扫辊,所述清扫辊的轴线沿前后方向延伸,所述机架的下侧面左端设有清扫球。
2.根据权利要求1所述的玻璃清洁机器人,其特征在于,所述机架包括上下平行间隔布置的顶板以及底板,所述顶板前侧右端以及所述底板后侧左端分别设有折弯部,所述顶板前侧左端以及所述底板前侧右端分别设有l形的连接板,所述连接板的水平部固定连接在所述顶板下侧面上,所述行走轮具有两个,两个所述行走轮分别转动安装在所述折弯部的外侧面上,所述履带组件包括主动履带轮、从动履带轮以及履带,所述主动履带轮以及从动履带轮转动安装在所述连接板的外侧面上,所述履带环绕在所述主动履带轮与所述从动履带轮之间。
3.根据权利要求2所述的玻璃清洁机器人,其特征在于,所述顶板的右端设有竖直向下延伸的折弯板,所述支架包括连接杆以及一体连接在所述连接杆两端的端杆,所述端杆向斜下方延伸,所述清扫辊通过轴承转动安装在两个所述端杆之间,所述连接杆的中间位置通过固定柱固定连接在所述折弯板的右侧面上。
4.根据权利要求3所述的玻璃清洁机器人,其特征在于,所述底板的左侧面上端安装有两个第一舵机,两个所述舵机前后间隔布置,所述底板上设有供所述第一舵机的输出轴穿出的穿孔,所述清扫球固定连接在所述第一舵机的输出轴端部。
5.根据权利要求2所述的玻璃清洁机器人,其特征在于,所述机架包括罩壳,所述罩壳固定连接在所述顶板上,所述罩壳罩上设有观察窗。
6.根据权利要求5所述的玻璃清洁机器人,其特征在于,所述第一驱动机构包括第二舵机,所述第二舵机固定连接在所述连接板的竖直部内侧,所述第二舵机的转轴与所述主动履带轮固定连接。
7.根据权利要求6所述的玻璃清洁机器人,其特征在于,所述底板的中心位置设有圆形的通孔,所述吸盘呈喇叭状,所述吸盘位于所述通孔内,所述吸盘的下端位于所述底板下侧,所述吸盘上设有安装套,所述吸盘上套装有弹簧,所述弹簧的下端与所述安装套抵接,所述弹簧的上端与所述顶板抵接,所述吸盘的上端通过固定套固定连接在所述顶板上,所述真空泵固定连接在所述顶板上。
8.根据权利要求2所述的玻璃清洁机器人,其特征在于,所述转轴通过安装座转动安装在所述顶板上,所述第二驱动机构包括第三舵机、主动齿轮以及从动齿轮,所述第三舵机通过固定座固定连接在所述顶板上,所述主动齿轮固定连接在所述第三舵机的输出轴端部,所述从动齿轮同轴固定连接在所述转轴上。
9.根据权利要求8所述的玻璃清洁机器人,其特征在于,所述气爪包括固定筒、抽气泵以及吸附罩,所述固定筒的上端与所述转轴固定连接,所述吸附罩安装在所述固定筒下端,所述抽气泵位于所述固定筒内,所述抽气泵的进气孔通过连接管与所述吸附罩连通,所述连接管上设有进气阀。
10.根据权利要求2所述的玻璃清洁机器人,其特征在于,所述推进风扇通过支架固定连接在所述顶板上,所述推进风扇的转轴的轴线朝右上方延伸。
技术总结
本技术涉及一种玻璃清洁机器人。该玻璃清洁机器人包括机架,所述机架的前后两侧分别转动安装有履带组件以及行走轮,机架上设有驱动所述履带组件行走的第一驱动机构,机架上转动安装有轴线沿前后方向延伸的转轴,机架上设有驱动所述转轴转动的第二驱动机构,转轴的两端分别设有气爪,所述机架的下侧设有吸盘,所述机架上设真空泵,所述真空泵的进气口与所述吸盘通过连接管连接,所述机架上设有为所述玻璃清洁机器人提供斜下方推进力的推进风扇,所述机架的右侧通过支架安装有清扫辊,所述清扫辊的轴线沿前后方向延伸,所述机架的下侧面左端设有清扫球。相比于现有技术中的玻璃清洁机器人,本技术的玻璃清洁机器人实用性强,清洁效果好。
技术研发人员:李宇坤,宋庚桓,吴桐,申泽铭,刘天恩
受保护的技术使用者:郑州大学
技术研发日:20230110
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!