一种双喷水擦窗机器人的制作方法
本技术涉及擦窗机器人,具体涉及一种双喷水擦窗机器人。
背景技术:
1、擦窗机器人作为服务机器人的一类,它的出现将使大面积玻璃窗的清洁维护变得简单,而且相对于人工清洁,机器人清洁效率高、成本低,具有一定的应用价值和商业前景。
2、现有的擦窗机器人(例如现有专利《清洁机及其路径控制方法》,公告号cn102920393b)包括机体、一到两个清洁轮,清洁轮内有行走装置和真空吸附装置,清洁布通过清洁环套在清洁轮上。擦窗机器人是一种在平整表面上按路径自动清理窗户的机器,如果遇到窗户上灰尘较多或窗户表面比较干燥的情况,灰尘因附着在窗户表面上太过牢固,而难以清理,为了增强清洁效果,需要对干燥的表面做湿润处理以达到清洁效果。
3、干燥的表面做湿润处理是擦窗机器人清洁关键之一,所以擦窗机器人对干燥的表面做湿润处理要求非常高。现有技术中擦窗机器人有的不具备水箱,且有的水箱容积较小且方向单一,目前没有对干燥表面做湿润处理的合适结构。
技术实现思路
1、本实用新型的目的在于公开了一种双喷水擦窗机器人,解决了现有擦窗机器人水箱容积较小且喷水方向单一,湿润处理效果差的问题。
2、为达到上述目的,本实用新型采用如下技术方案:
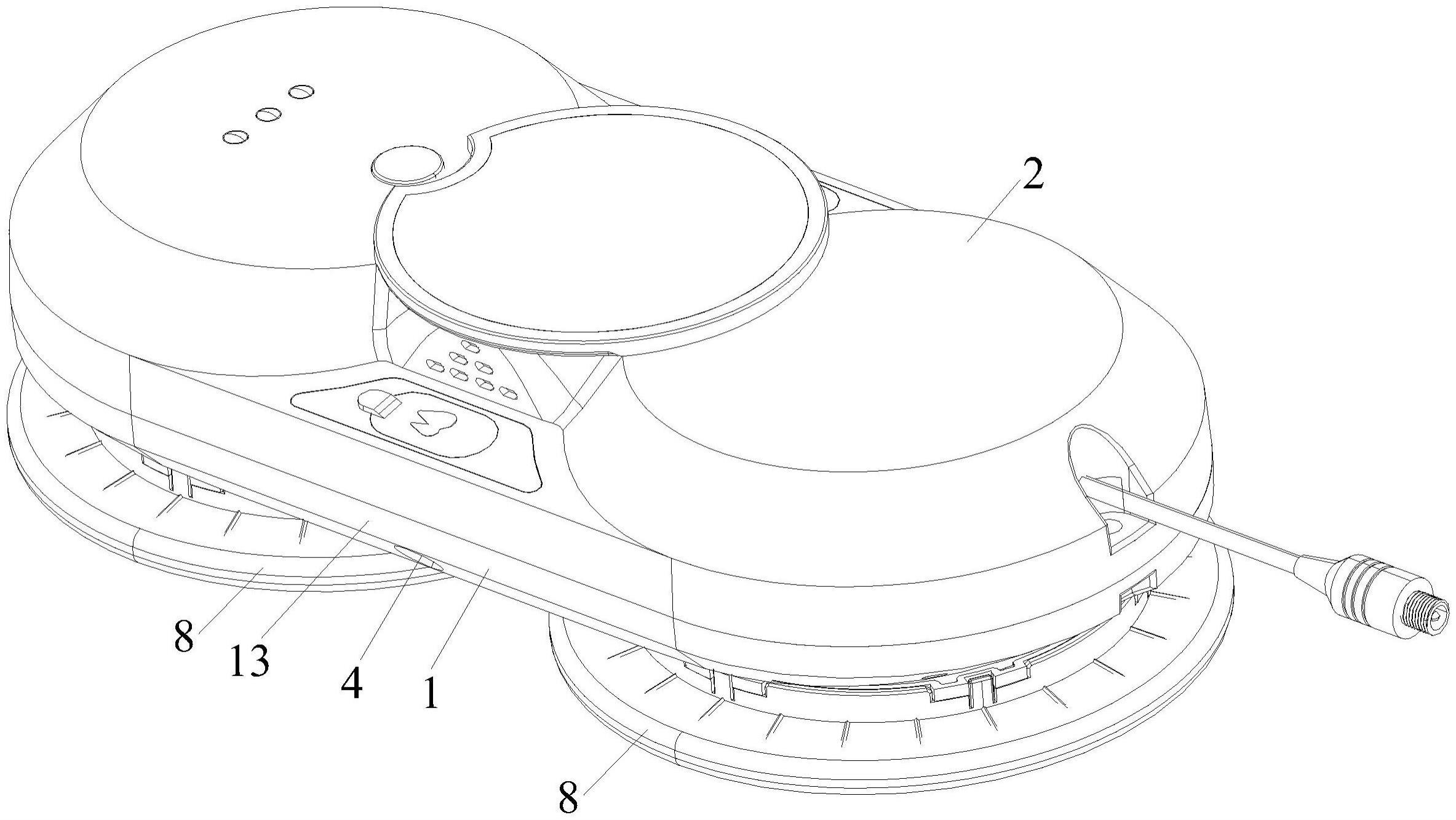
3、一种双喷水擦窗机器人,包括底座、与底座连接的上盖、第一水箱、连接第一水箱的第一雾化片、与底座连接的第二水箱和连接第二水箱的第二雾化片;底座和上盖形成安装腔,第一水箱和第二水箱设于安装腔中;第一雾化片和第二雾化片分别嵌设于底座的外壁上;底座设有相对设置的底座前壁和底座后壁;第一水箱设于临近底座前壁的位置,第一雾化片设于底座前壁的下部位置;第二水箱设于临近底座后壁的位置,第二雾化片设于底座后壁的下部位置。
4、进一步,所述第一水箱和所述第二水箱对称设置。
5、进一步,所述底座呈8字形的对称结构;所述第一水箱设于底座的腰部位置,所述第二水箱设于底座的腰部位置。
6、进一步,所述底座的内壁设有第一水箱安装槽和第二水箱安装槽,所述第一水箱插入第一水箱安装槽中,第一水箱的形状和第一水箱安装槽的形状相互配合;所述第二水箱插入第二水箱安装槽中,第二水箱的形状和第二水箱安装槽的形状相互配合。
7、进一步,所述第一水箱包括第一箱体和第一水箱盖,第一箱体的顶面设有第一入水口,第一水箱盖和第一入水口配合连接;第一箱体的侧壁下方位置设有第一倾斜面,第一倾斜面倾斜向下设置;第一箱体的第一出水口设于第一倾斜面上;所述第一雾化片和第一出水口配合连接。
8、进一步,所述第一倾斜面和所述第一箱体的底面的夹角a是120°~140°。
9、进一步,所述第二水箱包括第二箱体和第二水箱盖;第二箱体的顶面设有第二入水口,第二水箱盖和第二入水口配合连接;第二箱体的侧壁下方位置设有第二倾斜面,第二倾斜面倾斜向下设置;第二箱体的第二出水口设于第二倾斜面上,所述第二雾化片和第二出水口配合连接。
10、进一步,所述第二倾斜面上和所述第二箱体的底面的夹角b是120°~140°。
11、进一步,所述第一雾化片和所述第二雾化片分别是压电陶瓷雾化片。
12、进一步,包括嵌入式微控制器,所述第一雾化片和所述第二雾化片分别连接嵌入式微控制器。
13、与现有技术相比,本实用新型的有益效果:
14、本实用新型采用第一水箱与第一雾化片连接、第二水箱和第二雾化片连接的结构,采用双水箱设计增大储水量,同时采用第一雾化片和第二雾化片倾斜朝下设计,对干燥表面(例如玻璃)做预先的湿润处理,增强清洁效果。第一雾化片和第二雾化片分别是压电陶瓷雾化片通过高频振荡把液态的水振散,产生一种水雾化,形成非常细小的水珠,通过喷嘴给喷出来,形成雾状,更有利于水均匀喷射在在干燥表面,进一步增强清洁效果。
技术特征:
1.一种双喷水擦窗机器人,其特征在于:包括底座(1)、与底座连接的上盖(2)、第一水箱(3)、连接第一水箱的第一雾化片(4)、与底座连接的第二水箱(5)和连接第二水箱的第二雾化片(6);底座和上盖形成安装腔(7),第一水箱和第二水箱设于安装腔中;第一雾化片和第二雾化片分别嵌设于底座的外壁上;底座设有相对设置的底座前壁(13)和底座后壁(14);第一水箱设于临近底座前壁的位置,第一雾化片设于底座前壁的下部位置;第二水箱设于临近底座后壁的位置,第二雾化片设于底座后壁的下部位置。
2.根据权利要求1所述一种双喷水擦窗机器人,其特征在于:所述第一水箱(3)和所述第二水箱(5)对称设置。
3.根据权利要求1所述一种双喷水擦窗机器人,其特征在于:所述底座(1)呈8字形的对称结构;所述第一水箱(3)设于底座的腰部位置,所述第二水箱(5)设于底座的腰部位置。
4.根据权利要求1所述一种双喷水擦窗机器人,其特征在于:所述底座(1)的内壁设有第一水箱安装槽(11)和第二水箱安装槽(12),所述第一水箱(3)插入第一水箱安装槽中,第一水箱的形状和第一水箱安装槽的形状相互配合;所述第二水箱(5)插入第二水箱安装槽中,第二水箱的形状和第二水箱安装槽的形状相互配合。
5.根据权利要求1~4任意一项所述一种双喷水擦窗机器人,其特征在于:所述第一水箱(3)包括第一箱体(31)和第一水箱盖(32),第一箱体的顶面设有第一入水口,第一水箱盖和第一入水口配合连接;第一箱体的侧壁下方位置设有第一倾斜面(311),第一倾斜面倾斜向下设置;第一箱体的第一出水口设于第一倾斜面上;所述第一雾化片(4)和第一出水口配合连接。
6.根据权利要求5所述一种双喷水擦窗机器人,其特征在于:所述第一倾斜面(311)和所述第一箱体(31)的底面的夹角a是120°~140°。
7.根据权利要求1~4任意一项所述一种双喷水擦窗机器人,其特征在于:所述第二水箱(5)包括第二箱体(51)和第二水箱盖(52);第二箱体的顶面设有第二入水口,第二水箱盖和第二入水口配合连接;第二箱体的侧壁下方位置设有第二倾斜面(511),第二倾斜面倾斜向下设置;第二箱体的第二出水口设于第二倾斜面上,所述第二雾化片(6)和第二出水口配合连接。
8.根据权利要求7所述一种双喷水擦窗机器人,其特征在于:所述第二倾斜面(511)上和所述第二箱体(51)的底面的夹角b是120°~140°。
9.根据权利要求7所述一种双喷水擦窗机器人,其特征在于:所述第一雾化片(4)和所述第二雾化片(6)分别是压电陶瓷雾化片。
10.根据权利要求9所述一种双喷水擦窗机器人,其特征在于:包括嵌入式微控制器,所述第一雾化片(4)和所述第二雾化片(6)分别连接嵌入式微控制器。
技术总结
本技术公开了一种双喷水擦窗机器人,包括底座、与底座连接的上盖、第一水箱、连接第一水箱的第一雾化片、与底座连接的第二水箱和连接第二水箱的第二雾化片;底座和上盖形成安装腔,第一水箱和第二水箱设于安装腔中;第一雾化片和第二雾化片分别嵌设于底座的外壁上;底座设有相对设置的底座前壁和底座后壁;第一水箱设于临近底座前壁的位置,第一雾化片设于底座前壁的下部位置;第二水箱设于临近底座后壁的位置,第二雾化片设于底座后壁的下部位置。本技术采用以上结构,增大储水量,同时更有利于水均匀喷射在在干燥表面,进一步增强清洁效果。
技术研发人员:张丰,何虹均
受保护的技术使用者:东莞市昱婕智能科技有限公司
技术研发日:20230412
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!