一种楼梯平面一体化巡航清洁机器人
一种楼梯平面一体化巡航清洁机器人,属于清洁机器人。
背景技术:
1、在各种高层住宅或高层写字楼内,需要定期对住宅或写字楼进行清扫,目前对住宅或写字楼一般都是人工清扫的,这导致保洁人员的劳动强度高。
2、清洁机器人能够辅助保洁人员进行地面的清理,从而大大减轻了保洁人员的工作强度。但是目前保洁机器人只能够在同一楼层上工作,其无法实现爬楼梯的动作,进而无法实现对楼梯的清洁,因此目前楼梯主要还是依靠保洁人员来清理。
技术实现思路
1、本实用新型要解决的技术问题是:克服现有技术的不足,提供一种能够自动完成台阶的清扫的楼梯平面一体化巡航清洁机器人。
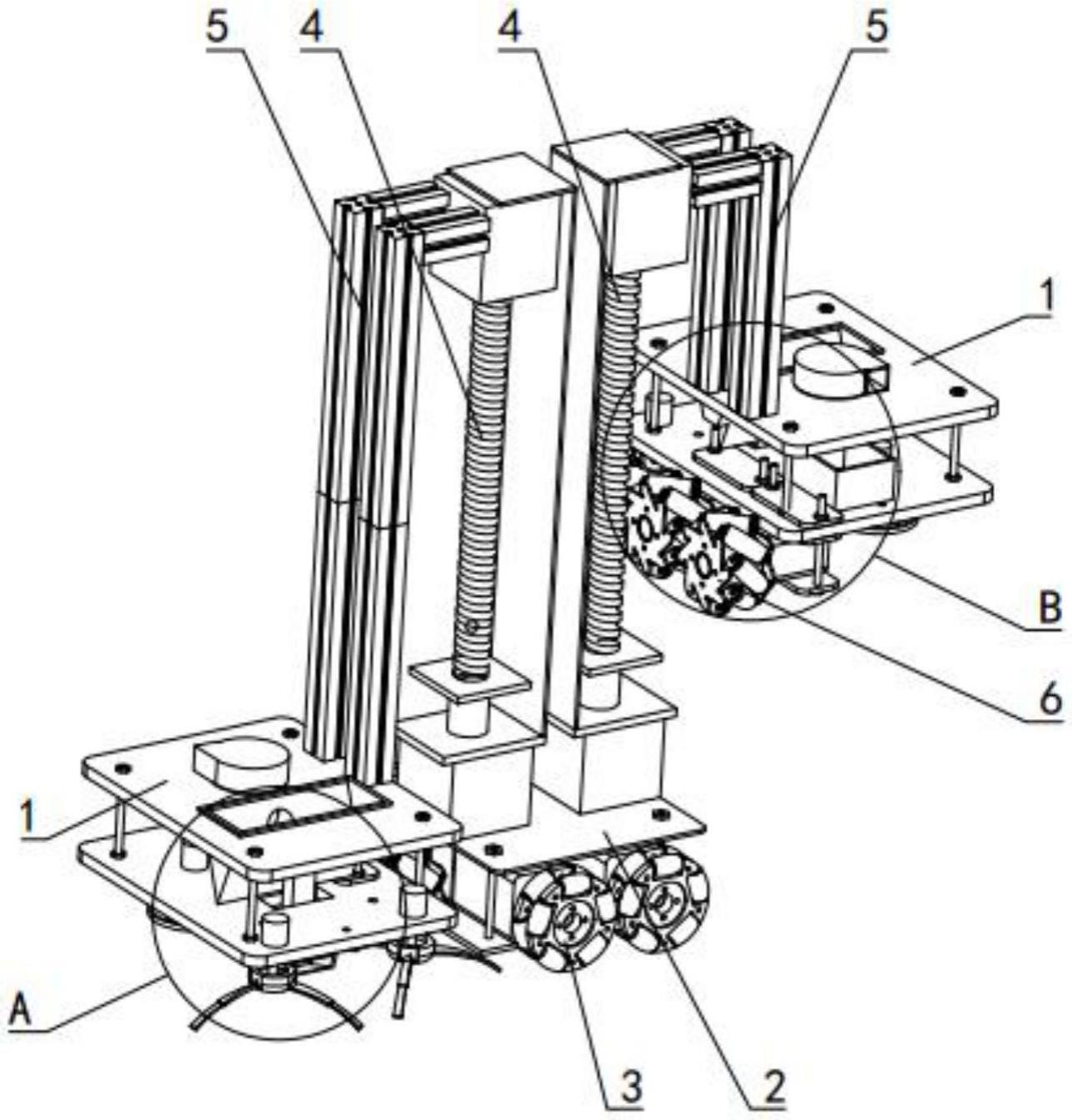
2、本实用新型解决其技术问题所采用的技术方案是:该楼梯平面一体化巡航清洁机器人,其特征在于:包括支撑装置、清扫装置以及升降装置,支撑装置相对的两侧均设置有清扫装置,各清扫装置与支撑装置之间均设置有升降装置,在支撑装置的底部和清扫装置的底部均设置有驱动装置。
3、优选的,所述的驱动装置包括驱动电机以及驱动轮,驱动电机与驱动轮连接,驱动轮为麦克纳姆轮。
4、优选的,位于所述支撑装置两侧的清扫装置在高度方向上依次设置。
5、优选的,所述的清扫装置包括清扫电机以及转盘,转盘安装在清扫电机的输出轴上,环绕转盘的侧部设置有若干边刷。
6、优选的,所述的边刷为沿远离转盘的方向逐渐向下的倾斜状。
7、优选的,所述的清扫装置还包括吸尘器,吸尘器的吸尘口设置在转盘的一侧。
8、优选的,所述的升降装置包括升降电机以及升降丝杠,升降丝杠竖向设置,升降电机的输出轴与升降丝杠连接,升降丝杠与对应侧的清扫装置螺纹连接。
9、与现有技术相比,本实用新型所具有的有益效果是:
10、本楼梯平面一体化巡航清洁机器人的支撑装置和清扫装置的底部均设置有驱动装置,使支撑装置以及各清扫装置能够分别实现驱动行进,各清扫装置与支撑装置之间均设置有升降装置,当行进到台阶处时,行进方向前侧的升降装置带动对应侧的清扫装置上升至高于对应的台阶,然后支撑装置继续向前行进,直至前侧的清扫装置位于对应的一阶台阶的上侧,该升降装置带动清扫装置下降,从而使前侧的清扫装置位于台阶上侧;两个升降装置同步动作,使支撑装置向上运动,此时前侧的清扫装置支撑在该阶台阶上,后侧的清扫装置支撑在上一阶台阶上,支撑装置上升至高于该阶台阶时,两清扫装置同步行进,直至支撑装置位于该阶台阶正上方,然后两升降装置带动支撑装置下降并支撑在该阶台阶上;后侧的升降装置带动后侧的清扫装置上升至高于该阶台阶,然后支撑装置和前侧的清扫装置行进,直至后侧的清扫装置位于该阶台阶的上侧,然后后侧的升降装置带动后侧的清扫装置下降,使后侧的清扫装置支撑在该阶台阶上,从而实现了沿台阶的爬升,爬升过程中各清扫装置对台阶进行清扫,整个过程不需要人工参与,减轻了保洁人员的劳动强度。
技术特征:
1.一种楼梯平面一体化巡航清洁机器人,其特征在于:包括支撑装置、清扫装置以及升降装置,支撑装置相对的两侧均设置有清扫装置,各清扫装置与支撑装置之间均设置有升降装置,在支撑装置的底部和清扫装置的底部均设置有驱动装置。
2.根据权利要求1所述的楼梯平面一体化巡航清洁机器人,其特征在于:所述的驱动装置包括驱动电机以及驱动轮,驱动电机与驱动轮连接,驱动轮为麦克纳姆轮。
3.根据权利要求1所述的楼梯平面一体化巡航清洁机器人,其特征在于:位于所述支撑装置两侧的清扫装置在高度方向上依次设置。
4.根据权利要求1或3所述的楼梯平面一体化巡航清洁机器人,其特征在于:所述的清扫装置包括清扫电机(9)以及转盘(10),转盘(10)安装在清扫电机(9)的输出轴上,环绕转盘(10)的侧部设置有若干边刷(11)。
5.根据权利要求4所述的楼梯平面一体化巡航清洁机器人,其特征在于:所述的边刷(11)为沿远离转盘(10)的方向逐渐向下的倾斜状。
6.根据权利要求4所述的楼梯平面一体化巡航清洁机器人,其特征在于:所述的清扫装置还包括吸尘器(7),吸尘器(7)的吸尘口(8)设置在转盘(10)的一侧。
7.根据权利要求1所述的楼梯平面一体化巡航清洁机器人,其特征在于:所述的升降装置包括升降电机以及升降丝杠(4),升降丝杠(4)竖向设置,升降电机的输出轴与升降丝杠(4)连接,升降丝杠(4)与对应侧的清扫装置螺纹连接。
技术总结
一种楼梯平面一体化巡航清洁机器人,属于清洁机器人技术领域。其特征在于:包括支撑装置、清扫装置以及升降装置,支撑装置相对的两侧均设置有清扫装置,各清扫装置与支撑装置之间均设置有升降装置,在支撑装置的底部和清扫装置的底部均设置有驱动装置。本楼梯平面一体化巡航清洁机器人实现了沿台阶的爬升,爬升过程中各清扫装置对台阶进行清扫,整个过程不需要人工参与,减轻了保洁人员的劳动强度。
技术研发人员:谢林袁,丁丽,黄磊,董泽恺,乔凯峰,刘启成
受保护的技术使用者:山东理工大学
技术研发日:20230418
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!