机器人基站和机器人系统的制作方法
本技术属于清洁设备相关,具体涉及一种机器人基站和机器人系统。
背景技术:
1、随着生活条件和科技水平的不断进步,清洁设备具有方便使用、清洁效果好的优点,因此,清洁设备逐渐开始取代人工清洁广泛的出现在生活和工作中。随着清洁设备的普及,机器人基站的功能也越来越多,单一的功能模块已经远远不能满足用户的需求,机器人基站通常需要多个功能模块进行叠加,这就导致基站的尺寸越来越大,高度越来越高。
2、目前,现有的功能模块通常沿竖直方向移动,功能模块从基站的上方进行更换耗材,这就需要基站的上方具有足够的竖直操作空间,导致基站的适应性较差,比如无法安装在低矮的空间内,例如橱柜、台盆柜、阳台柜等下面。
3、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本实用新型所要解决的技术问题是功能模块从机器人基站的上方更换导致机器人基站占用的竖直空间较大、无法适配低矮的空间。
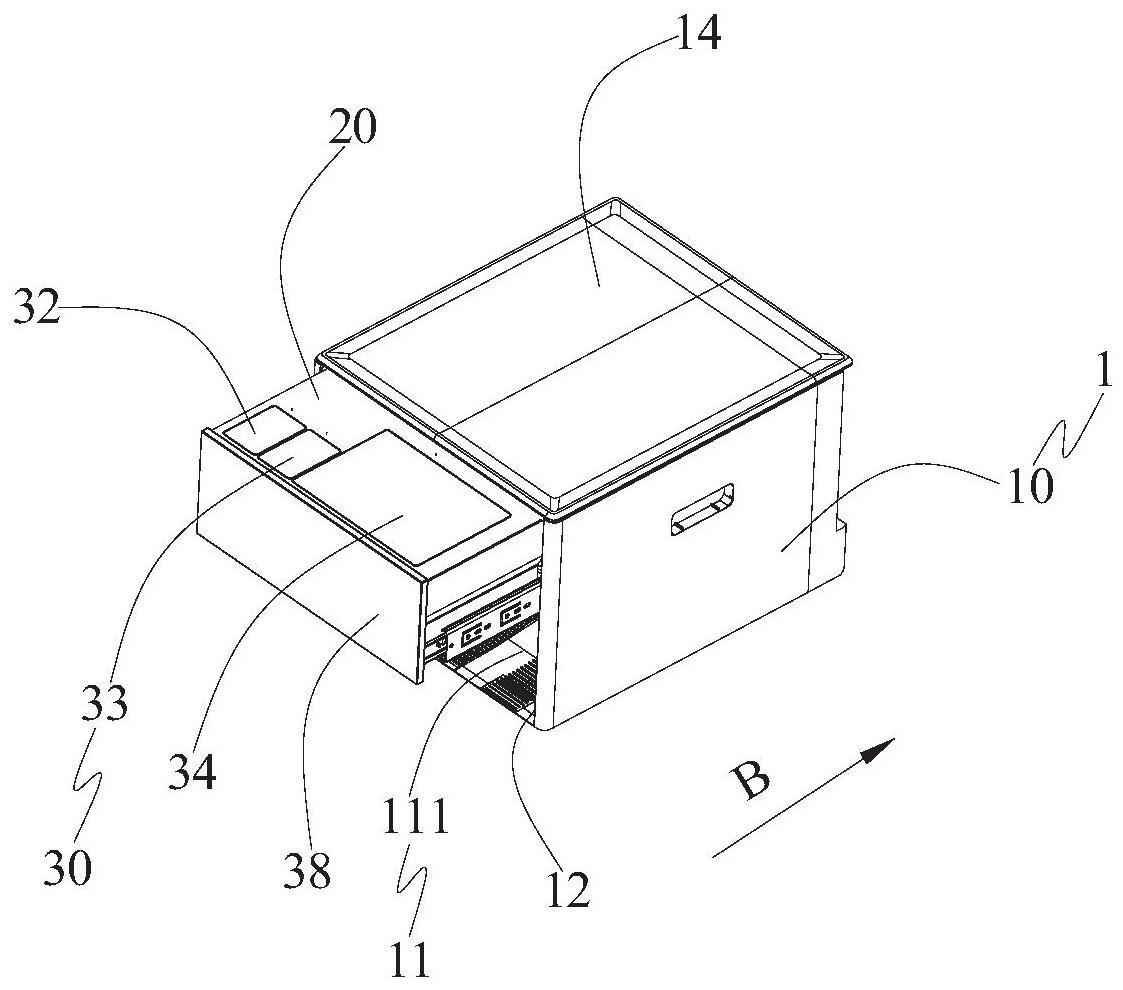
2、为解决上述技术问题,本实用新型提供一种机器人基站,至少包括第一腔体和第二腔体,其中,第一腔体用于供机器人停靠;第二腔体用于设置至少一个功能模块,第二腔体与第一腔体上下堆叠;机器人基站还包括顶壁,顶壁所在的平面与水平面之间大致平行,第二腔体相较于第一腔体邻近顶壁设置,至少一个功能模块可沿第一方向在第一位置和第二位置之间移动,第一方向与顶壁所在的平面之间大致平行,第一方向与机器人进出机器人基站的方向之间大致平行。
3、可选地,至少一个功能模块具有至少一个操作窗口,当功能模块位于第一位置时,操作窗口位于机器人基站内,当功能模块位于第二位置时,操作窗口露出机器人基站外。
4、可选地,至少一个功能模块设置于一个容纳结构中,容纳结构带动至少一个功能模块在第一位置和第二位置之间移动。
5、可选地,容纳结构具有能封住第二腔体侧面的整体化面板,且至少一个操作窗口邻近整体化面板设置。
6、可选地,功能模块至少为两个,且每个功能模块对应设置有至少一个操作窗口;每个功能模块可单独在第一位置和第二位置之间移动。
7、可选地,功能模块至少为三个,且至少两个功能模块可同步在第一位置和第二位置之间移动,剩余至少一个功能模块可单独移动。
8、可选地,操作窗口的数量为至少两个,且至少两个操作窗口的排布方向大致垂直于第一方向。
9、可选地,至少两个操作窗口在大致同一水平面上。
10、可选地,功能模块与机器人基站之间设置有滑动机构,滑动机构供功能模块在第一位置和第二位置之间移动,滑动机构设置在功能模块的侧壁或底壁或顶壁上。
11、可选地,功能模块包括清水箱、清洁液箱、污水箱、集尘箱中的至少一个。
12、可选地,至少一个操作窗口可操作地向清水箱注水、向清洁液箱注入清洁液、清理污水箱的滤网、为集尘箱更换尘袋。
13、可选地,第二腔体的高度不超过第一腔体的高度的2倍。
14、可选地,至少一个功能模块可手动或自动地在第一位置和第二位置之间移动。
15、本实用新型还提供一种机器人系统,包括清洁机器人和上述的机器人基站。
16、本实用新型提供的技术方案,具有以下优点:
17、本实用新型提供的机器人基站,至少包括第一腔体和第二腔体,第一腔体用于供机器人停靠;第二腔体用于设置至少一个功能模块,第二腔体与第一腔体上下堆叠;机器人基站还包括顶壁,顶壁所在的平面与水平面之间大致平行,第二腔体相较于第一腔体邻近顶壁设置,至少一个功能模块可沿第一方向在第一位置和第二位置之间移动,第一方向与顶壁所在的平面之间大致平行,第一方向与机器人进出机器人基站的方向之间大致平行。
18、本实用新型中的机器人基站将至少一个功能模块沿水平方向在第一位置和第二位置之间移动,功能模块从机器人基站的侧面进行更换耗材,不需要占用机器人基站上方的过多空间,机器人基站的适应性更强,可以安装在低矮的空间内,例如橱柜、台盆柜、阳台柜等下面。
技术特征:
1.一种机器人基站,至少包括:
2.根据权利要求1所述的机器人基站,其特征在于:至少一个所述功能模块(30)具有至少一个操作窗口(37),当所述功能模块(30)位于所述第一位置时,所述操作窗口(37)位于所述机器人基站(1)内,当所述功能模块(30)位于所述第二位置时,所述操作窗口(37)露出所述机器人基站(1)外。
3.根据权利要求2所述的机器人基站,其特征在于:至少一个所述功能模块(30)设置于一个容纳结构(20)中,所述容纳结构(20)带动至少一个所述功能模块(30)在所述第一位置和所述第二位置之间移动。
4.根据权利要求3所述的机器人基站,其特征在于:所述容纳结构(20)具有能封住所述第二腔体(112)侧面的整体化面板(38),且至少一个所述操作窗口(37)邻近所述整体化面板(38)设置。
5.根据权利要求2所述的机器人基站,其特征在于:所述功能模块(30)至少为两个,且每个所述功能模块(30)对应设置有至少一个操作窗口(37);每个所述功能模块(30)可单独在所述第一位置和所述第二位置之间移动。
6.根据权利要求5所述的机器人基站,其特征在于:所述功能模块(30)至少为三个,且至少两个所述功能模块(30)可同步在所述第一位置和所述第二位置之间移动,剩余至少一个功能模块(30)可单独移动。
7.根据权利要求2所述的机器人基站,其特征在于:所述操作窗口(37)的数量为至少两个,且至少两个所述操作窗口(37)的排布方向大致垂直于所述第一方向。
8.根据权利要求7所述的机器人基站,其特征在于:至少两个所述操作窗口(37)在大致同一水平面上。
9.根据权利要求1所述的机器人基站,其特征在于:所述功能模块(30)与所述机器人基站(1)之间设置有滑动机构(13),所述滑动机构(13)供所述功能模块(30)在所述第一位置和所述第二位置之间移动,所述滑动机构(13)设置在所述功能模块(30)的侧壁或底壁或顶壁上。
10.根据权利要求2所述的机器人基站,其特征在于:所述功能模块(30)包括清水箱、清洁液箱(33)、污水箱(32)、集尘箱(34)中的至少一个。
11.根据权利要求10所述的机器人基站,其特征在于:至少一个所述操作窗口(37)可操作地向所述清水箱注水、向清洁液箱(33)注入清洁液、清理所述污水箱(32)的滤网、为集尘箱(34)更换尘袋。
12.根据权利要求1所述的机器人基站,其特征在于:所述第二腔体(112)的高度不超过所述第一腔体(111)的高度的2倍。
13.根据权利要求1所述的机器人基站,其特征在于:所述至少一个功能模块(30)可手动或自动地在所述第一位置和所述第二位置之间移动。
14.一种机器人系统,包括清洁机器人(2)和如权利要求1至13任一项所述的机器人基站(1)。
技术总结
本技术了公开一种机器人基站和机器人系统,机器人基站至少包括第一腔体和第二腔体,其中,第一腔体用于供机器人停靠;第二腔体用于设置至少一个功能模块,第二腔体与第一腔体上下堆叠;机器人基站还包括顶壁,顶壁所在的平面与水平面之间大致平行,第二腔体相较于第一腔体邻近顶壁设置,至少一个功能模块可沿第一方向在第一位置和第二位置之间移动,第一方向与顶壁所在的平面之间大致平行,第一方向与机器人进出机器人基站的方向之间大致平行。本技术公开的机器人基站能够解决现有技术中的功能模块从基站的上方更换导致基站占用的竖直空间较大、无法适配低矮的空间的问题。
技术研发人员:薛金龙,李东
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:20230428
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!