一种扫地机器人及扫地机器人的清理模块的制作方法
本技术涉及智能家电,具体涉及一种扫地机器人及扫地机器人的清理模块。
背景技术:
1、扫地机器人是一种常见的智能家电,用于自动地完成对于房间地板的清理。
2、在相关技术中,扫地机器人配置有走行模块和清理模块,扫地机器人可以通过走行模块在房间内进行位移,并可通过清理模块对房间地板进行清理。一般而言,清理模块的结构形式固定,清理范围有限,在对房间进行清理时,容易存在清理死角,例如墙角处、墙体拐弯处等,导致用户的使用体验相对较差。
3、因此,如何提供一种方案,以克服或者缓解上述缺陷,仍是本领域技术人员亟待解决的技术问题。
技术实现思路
1、本实用新型的目的是提供一种扫地机器人及扫地机器人的清理模块,其中,该清理模块配置有可相对位移的扩展部件,能够形成不同的清理范围,可减少清理死角,有利于提升清理效率以及清理死角,并能够提升用户的使用体验。
2、为解决上述技术问题,本实用新型提供一种扫地机器人的清理模块,包括旋转盘和扩展部件,所述旋转盘转动设置,所述扩展部件安装于所述旋转盘,并能够相对所述旋转盘进行位置移动,以在第一工作位置和第二工作位置之间进行切换;处于所述第一工作位置的所述扩展部件的转动覆盖范围小于处于所述第二工作位置的所述扩展部件的转动覆盖范围。
3、上述的方案中,扩展部件可以移动地装配于旋转盘,以在第一工作位置和第二工作位置之间进行切换,扩展部件在第一工作位置时的转动覆盖范围小于在第二工作位置时的转动覆盖范围,这样,扩展部件可以形成不同的清理范围,能够实现对于不同区域的清理,有利于减少清理死角、提升清理效率以及清理效果,并能够提升用户的使用体验。
4、可选地,还包括第一弹性部件,所述第一弹性部件设置在所述旋转盘和所述扩展部件之间,所述第一弹性部件被配置为能够驱使所述扩展部件切换至所述第一工作位置或者所述第二工作位置。
5、可选地,所述扩展部件被配置为能够在旋转离心力的作用下切换至所述第二工作位置,所述第一弹性部件被配置为能够驱使所述扩展部件切换至所述第一工作位置。
6、可选地,所述扩展部件被配置为在碰撞障碍物时能够相对地朝向所述旋转盘进行位移,以切换至所述第一工作位置;所述第一弹性部件被配置为在所述障碍物消除时驱使所述扩展部件远离所述旋转盘进行位移,以切换至所述第二工作位置。
7、可选地,所述扩展部件可转动地装配于所述旋转盘。
8、可选地,所述旋转盘配置有铰接轴,所述扩展部件外套装配于所述铰接轴,所述铰接轴还配置有阻挡件,所述阻挡件位于所述扩展部件背离所述旋转盘的一侧。
9、可选地,所述旋转盘的外缘部设置有缺口,在所述第一工作位置时,所述扩展部件能够转入所述缺口内,在所述第二工作位置时,所述扩展部件能够转出所述缺口。
10、可选地,所述旋转盘配置有第二清理部。
11、可选地,所述旋转盘包括主盘体、浮动轴和第二弹性部件,所述第一清理部以及所述扩展部件均安装于所述主盘体,所述浮动轴沿轴向滑动连接于所述主盘体,所述浮动轴和所述主盘体能够同步转动,所述第二弹性部件设置在所述浮动轴和所述主盘体之间。
12、可选地,所述清理模块还配置有驱转部,所述驱转部配置有驱动轴,所述浮动轴可拆卸地连接于所述驱动轴。
13、本实用新型还提供一种扫地机器人,包括机器主体和清理模块,所述清理模块安装于所述机器主体,所述清理模块为上述的扫地机器人的清理模块。
14、由于上述的扫地机器人的清理模块已经具备如上的技术效果,那么,具有该清理模块的扫地机器人亦当具备相类似的技术效果,故在此不做赘述。
15、可选地,所述机器主体具有障碍壁,所述障碍壁被配置为能够驱使所述扩展部件切换至所述第一工作位置。
16、可选地,所述旋转盘的数量为多个;相邻的两所述旋转盘中,一者被配置为能够驱使另一者的所述扩展部件切换至所述第一工作位置。
技术特征:
1.一种扫地机器人的清理模块,其特征在于,包括旋转盘(31)和扩展部件(32),所述旋转盘(31)转动设置,所述扩展部件(32)安装于所述旋转盘(31),并能够相对所述旋转盘(31)进行位置移动,以在第一工作位置和第二工作位置之间进行切换;
2.根据权利要求1所述扫地机器人的清理模块,其特征在于,还包括第一弹性部件(33),所述第一弹性部件(33)设置在所述旋转盘(31)和所述扩展部件(32)之间,所述第一弹性部件(33)被配置为能够驱使所述扩展部件(32)切换至所述第一工作位置或者所述第二工作位置。
3.根据权利要求2所述扫地机器人的清理模块,其特征在于,所述扩展部件(32)被配置为能够在旋转离心力的作用下切换至所述第二工作位置,所述第一弹性部件(33)被配置为能够驱使所述扩展部件(32)切换至所述第一工作位置。
4.根据权利要求2所述扫地机器人的清理模块,其特征在于,所述扩展部件(32)被配置为在碰撞障碍物时能够相对地朝向所述旋转盘(31)进行位移,以切换至所述第一工作位置;所述第一弹性部件(33)被配置为在所述障碍物消除时驱使所述扩展部件(32)远离所述旋转盘(31)进行位移,以切换至所述第二工作位置。
5.根据权利要求1-4中任一项所述扫地机器人的清理模块,其特征在于,所述扩展部件(32)可转动地装配于所述旋转盘(31)。
6.根据权利要求5所述扫地机器人的清理模块,其特征在于,所述旋转盘(31)配置有铰接轴(311),所述扩展部件(32)外套装配于所述铰接轴(311),所述铰接轴(311)还配置有阻挡件(35),所述阻挡件(35)位于所述扩展部件(32)背离所述旋转盘(31)的一侧。
7.根据权利要求5所述扫地机器人的清理模块,其特征在于,所述旋转盘(31)的外缘部设置有缺口(31a),在所述第一工作位置时,所述扩展部件(32)能够转入所述缺口(31a)内,在所述第二工作位置时,所述扩展部件(32)能够转出所述缺口(31a)。
8.根据权利要求1-4中任一项所述扫地机器人的清理模块,其特征在于,所述旋转盘(31)配置有第二清理部(36)。
9.根据权利要求1-4中任一项所述扫地机器人的清理模块,其特征在于,所述旋转盘(31)包括主盘体(312)、浮动轴(313)和第二弹性部件(314),所述扩展部件(32)安装于所述主盘体(312),所述浮动轴(313)沿轴向滑动连接于所述主盘体(312),所述浮动轴(313)和所述主盘体(312)能够同步转动,所述第二弹性部件(314)设置在所述浮动轴(313)和所述主盘体(312)之间。
10.根据权利要求9所述扫地机器人的清理模块,其特征在于,所述清理模块(3)还配置有驱转部(37),所述驱转部(37)配置有驱动轴,所述浮动轴(313)可拆卸地连接于所述驱动轴。
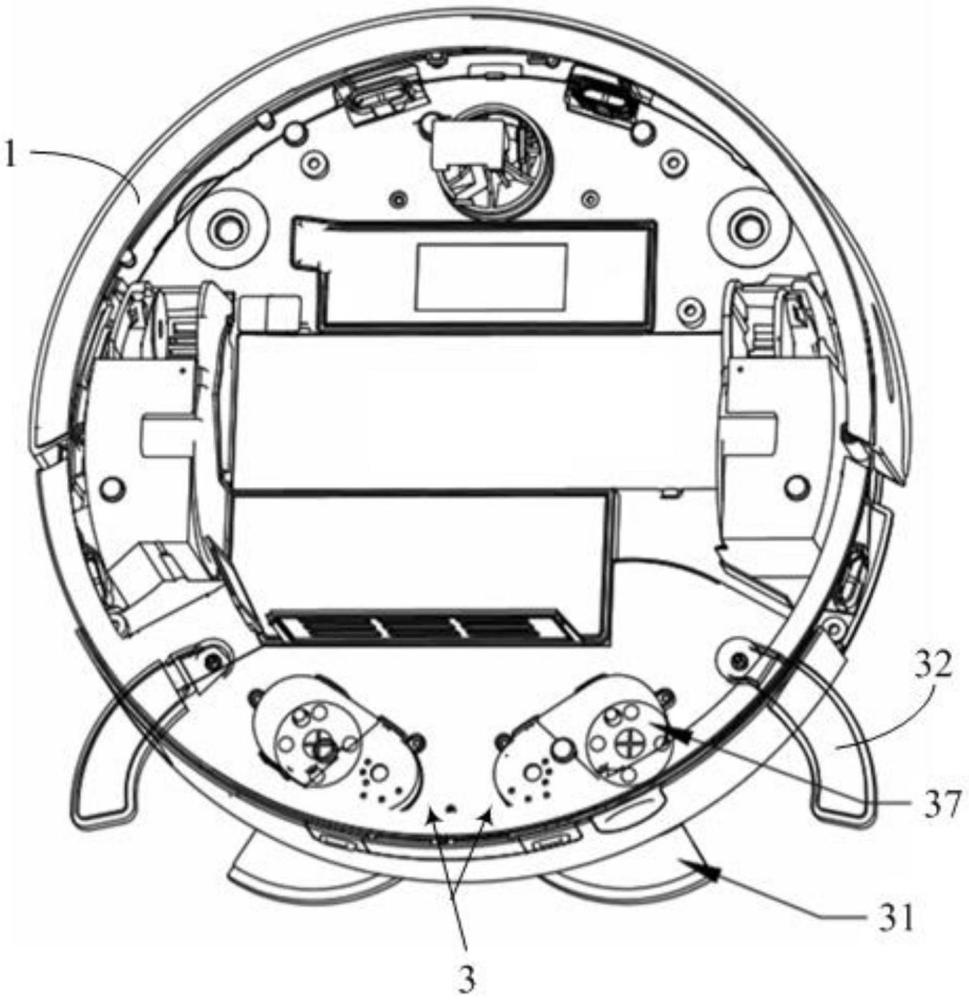
11.一种扫地机器人,包括机器主体(1)和清理模块(3),所述清理模块(3)安装于所述机器主体(1),其特征在于,所述清理模块(3)为权利要求1-10中任一项所述扫地机器人的清理模块。
12.根据权利要求11所述扫地机器人,其特征在于,所述机器主体(1)具有障碍壁(11),所述障碍壁(11)被配置为能够驱使所述扩展部件(32)切换至所述第一工作位置。
13.根据权利要求11或12所述扫地机器人,其特征在于,所述旋转盘(31)的数量为多个;相邻的两所述旋转盘(31)中,一者被配置为能够驱使另一者的所述扩展部件(32)切换至所述第一工作位置。
技术总结
本技术公开一种扫地机器人及扫地机器人的清理模块,其中,该清理模块包括旋转盘和扩展部件,旋转盘转动设置,扩展部件安装于旋转盘,并能够相对旋转盘进行位置移动,以在第一工作位置和第二工作位置之间进行切换;处于第一工作位置的扩展部件的转动覆盖范围小于处于第二工作位置的扩展部件的转动覆盖范围。上述扫地机器人的清理模块配置有可相对位移的扩展部件,能够形成不同的清理范围,可减少清理死角,有利于提升清理效率以及清理死角,并能够提升用户的使用体验。
技术研发人员:朱亮亮,王箭
受保护的技术使用者:科大讯飞股份有限公司
技术研发日:20230512
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!