一种烹饪机器人炒锅驱动装置的制作方法
本技术涉及的是烹饪机器人用于驱动翻锅和驱动拨叉的装置,具体涉及的是一种烹饪机器人炒锅驱动装置。
背景技术:
1、炒锅是中国一种烹饪工具,为锅的一种,特征是顶部开口大,圆底,炒锅主要用作煎或炒食物,但也可以用作蒸、炖、炸等其他不同的烹饪方法。随着科技的进步,烹饪机器人已出现在社会生活中,烹饪机器人能自动炒、煎、烹、炸、爆、焖、蒸、煮、烙、炖、煲等一锅多用的功能,轻松实现了炒菜过程的自动化和趣味化。烹饪机器人中的锅具包括锅体,锅体与翻锅电机通过翻锅驱动轴连接,锅体设置有侧耳,侧耳水平伸出于锅体外侧,侧耳设置有轴孔,翻锅驱动轴通过穿过轴孔安装在锅体上,翻锅驱动轴与轴孔紧密配合,通过翻锅驱动轴驱动锅体翻转,将锅内炒制好的菜品倒出;锅体内的拨叉是炒菜过程中搅动锅体内菜品的,拨叉还需要驱动装置驱动,使拨叉搅拌菜品,这样,翻锅驱动轴驱动锅体翻转需要驱动装置,而驱动拨叉需要拨叉驱动轴驱动,拨叉驱动轴也需要驱动装置驱动,使得锅具的驱动需要两套驱动装置,每套驱动装置需要配备一台电机,导致锅具驱动比较复杂,驱动成本高,且安装维修工作任务重,同时导致烹饪机器人的控制系统也比较复杂。
技术实现思路
1、本实用新型的目的是提供一种烹饪机器人炒锅驱动装置,这种烹饪机器人炒锅驱动装置用于解决现有烹饪机器人锅具驱动装置比较复杂的问题。
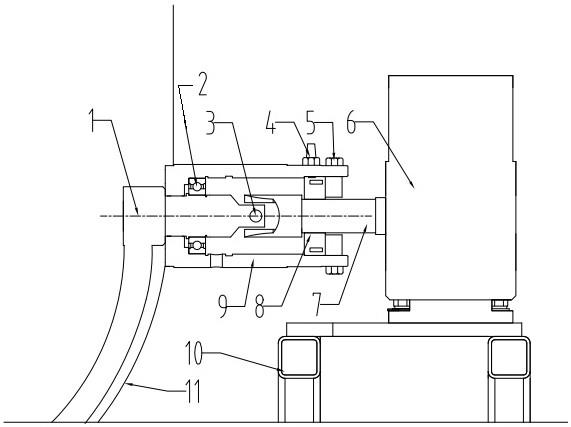
2、本实用新型解决其技术问题所采用的技术方案是:这种烹饪机器人炒锅驱动装置包括锅体、电机、减速机、传动轴、锅体轴、拨叉驱动轴、电磁离合器,锅体内设置有拨叉,锅体轴为筒形回转体,锅体轴具有轴孔的一端与锅体固定连接,锅体轴的另一端为开放的,拨叉驱动轴一端从轴孔伸入到锅体内与拨叉连接,拨叉驱动轴与锅体轴内壁之间设置轴承,拨叉驱动轴另一端连接传动轴,传动轴另一端连接减速机输出端;电磁离合器为牙嵌式电磁离合器,电磁离合器线圈端固定在传动轴上,电磁离合器吸合端通过固定螺栓固定在锅体轴的内壁上,电磁离合器吸合端与传动轴之间具有间隙,电极设置于锅体轴外壁上。
3、上述方案中拨叉驱动轴为变径轴,拨叉驱动轴与传动轴连接的一端缩径形成连接头,传动轴设置轴孔,拨叉驱动轴的连接头伸入到传动轴的轴孔中并通过联轴器与传动轴连接。
4、上述方案中轴承设置于靠近锅体轴的轴孔处。
5、上述方案中减速机设置于框架上。
6、上述方案中电磁离合器设置于锅体轴的开口端,传动轴经电磁离合器伸入到锅体轴内。
7、本实用新型具有以下有益效果:
8、本实用新型锅具驱动装置只通过一套驱动装置,一台电机和一台减速机,就可以实现驱动拨叉搅拌菜品,实现翻转锅体,将锅体内菜品倒出。
9、本实用新型结构简单,成本低,易损件少,可靠性高。
10、3、本实用新型可以简化烹饪机器人的控制系统,使控制系统简单。
11、4、本实用新型安装及维修都简单易行,安装维修工作量小。
技术特征:
1.一种烹饪机器人炒锅驱动装置,其特征在于:这种烹饪机器人炒锅驱动装置包括锅体、电机、减速机、传动轴、锅体轴、拨叉驱动轴、电磁离合器,锅体内设置有拨叉,锅体轴为筒形回转体,锅体轴具有轴孔的一端与锅体固定连接,锅体轴的另一端为开放的,拨叉驱动轴一端从轴孔伸入到锅体内与拨叉连接,拨叉驱动轴与锅体轴内壁之间设置轴承,拨叉驱动轴另一端连接传动轴,传动轴另一端连接减速机输出端;电磁离合器为牙嵌式电磁离合器,电磁离合器线圈端固定在传动轴上,电磁离合器吸合端通过固定螺栓固定在锅体轴的内壁上,电磁离合器吸合端与传动轴之间具有间隙,电极设置于锅体轴外壁上。
2.根据权利要求1所述的烹饪机器人炒锅驱动装置,其特征在于:所述的拨叉驱动轴为变径轴,拨叉驱动轴与传动轴连接的一端缩径形成连接头,传动轴设置轴孔,拨叉驱动轴的连接头伸入到传动轴的轴孔中并通过联轴器与传动轴连接。
3.根据权利要求2所述的烹饪机器人炒锅驱动装置,其特征在于:所述的轴承设置于靠近锅体轴的轴孔处。
4.根据权利要求3所述的烹饪机器人炒锅驱动装置,其特征在于:所述的减速机设置于框架上。
5.根据权利要求4所述的烹饪机器人炒锅驱动装置,其特征在于:所述的电磁离合器设置于锅体轴的开口端,传动轴经电磁离合器伸入到锅体轴内。
技术总结
本技术涉及的是一种烹饪机器人炒锅驱动装置,它包括锅体、电机、减速机、传动轴、锅体轴、拨叉驱动轴、电磁离合器,锅体内设置有拨叉,锅体轴为筒形回转体,锅体轴具有轴孔的一端与锅体固定连接,锅体轴的另一端为开放的,拨叉驱动轴一端从轴孔伸入到锅体内与拨叉连接,拨叉驱动轴与锅体轴内壁之间设置轴承,拨叉驱动轴另一端连接传动轴,传动轴另一端连接减速机输出端;电磁离合器线圈端固定在传动轴上,电磁离合器吸合端通过固定螺栓固定在锅体轴的内壁上,电磁离合器吸合端与传动轴之间具有间隙,电极设置于锅体轴外壁上。本技术只通过一套驱动装置,就可以实现驱动拨叉搅拌菜品,实现翻转锅体,将锅体内菜品倒出。
技术研发人员:贾志平,龙天华,邴玉春,孙磊,程明福
受保护的技术使用者:黑龙江省发现者机器人股份有限公司
技术研发日:20230518
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!