一种机器人学步车的制作方法
本公开涉及学步车,尤其涉及一种机器人学步车。
背景技术:
1、学习站立和行走是人类成长的必经过程,通常情况下都需要学步车辅助幼儿站立行走直到其可以稳步前行。
2、目前许多学步车产品看起来很相似,具有抽象的结构/不同的功能,但是缺乏一致性。通过调研可以发现,市面上许多学步车都不适合12个月大的婴儿。如何设计出一个既可以满足不同年龄段且性能良好的学步辅助且吸引力强的产品,成为了玩具设计难题。
技术实现思路
1、本公开所要解决的一个技术问题是:怎样提供一种既满足不同年龄段且性能良好的学步辅助且吸引力强的学步车。
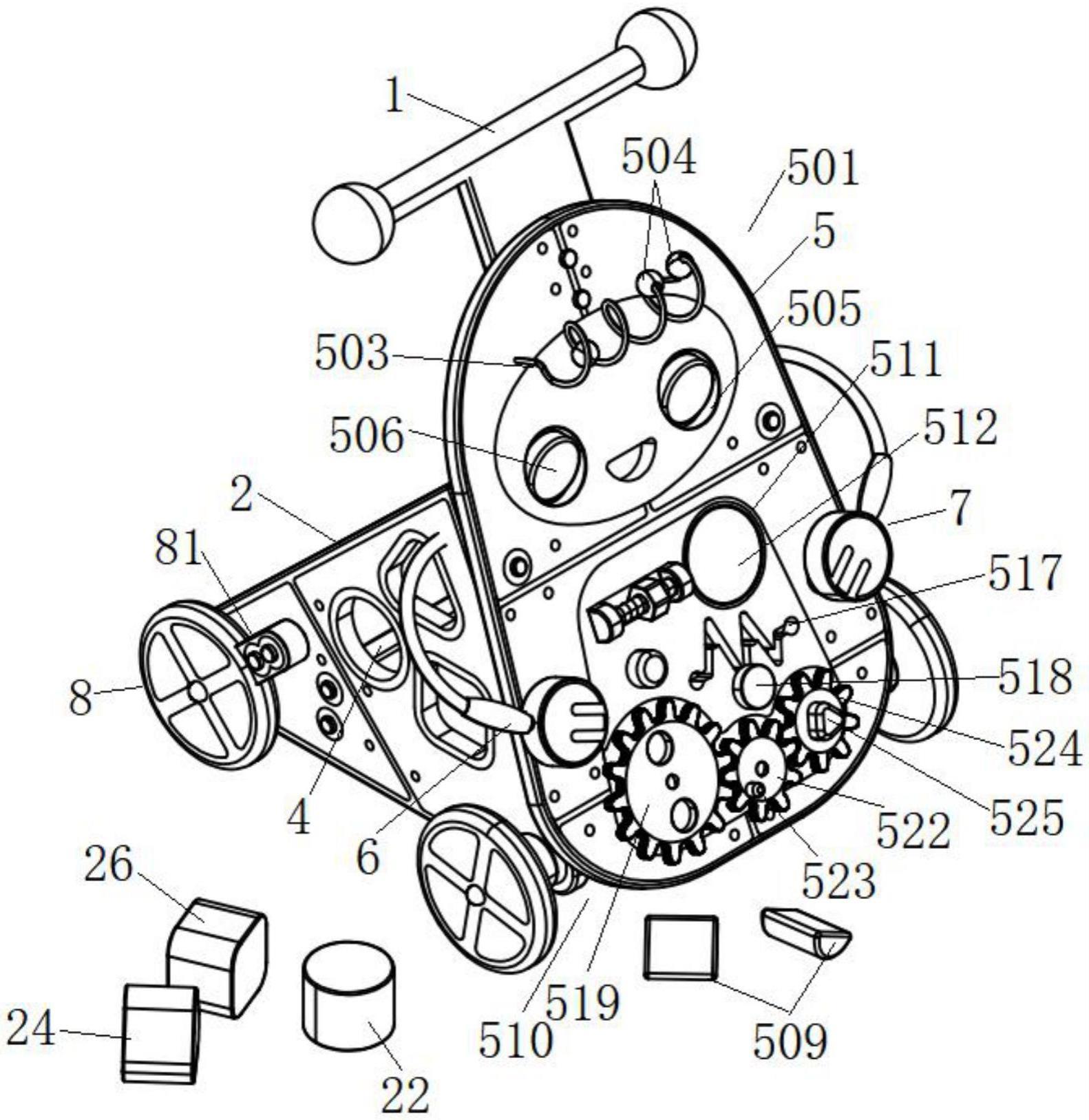
2、为解决上述技术问题,本公开实施例提供一种机器人学步车,包括:把手、右侧板、左侧板、底板、面板、右手臂、左手臂和车轮;其中,左侧板和右侧板分设于底板的左右相对两侧;面板设于底板的前侧且朝后倾斜设置以使底板的后侧空间形成行走空间,面板由上而下依次为具有头部造型的头部区域和具有躯干造型的躯干区域;把手安装在面板的上端且可沿面板的倾斜方向做往复运动;右手臂安装在右侧板;左手臂安装在左侧板;车轮分别安装在右侧板和左侧板的前端和后端且位于后端的一对车轮位于行走空间的左右两侧。
3、在一些实施例中,把手包括:握持部,其沿左右方向延展;以及,档位板,其沿面板的倾斜方向延展;其中,握持部和档位板呈t型设置,档位板设有安装孔;面板设有长条孔;连接件依次贯穿长条孔、安装孔以实现档位板安装在面板。
4、在一些实施例中,右侧板设有立体块安装洞以及可拆装于该立体块安装洞的立体块。
5、在一些实施例中,左侧板设有通过击打发生声音的音乐发生器,左手臂的活动区域覆盖音乐发生器。
6、在一些实施例中,车轮设有调节其自身速度的刹车机构。
7、在一些实施例中,右手臂和左手臂均包括安装端和活动端;其中,安装端安装在右侧板或左侧板;活动端可相对安装端运动。
8、在一些实施例中,右手臂和左手臂可抓取物品。
9、在一些实施例中,头部区域具有头发造型、脸部轮廓造型、眼睛造型和嘴巴造型。
10、在一些实施例中,头发造型包括弹簧和绕珠;其中,弹簧设置在脸部轮廓造型的上部;绕珠滑移安装在弹簧。
11、在一些实施例中,两个眼睛造型位于脸部轮廓造型的中部且沿左右方向对称设置,其包括眼洞、眼珠和转轴;其中,转轴安装在眼洞的内部;眼珠转动安装在转轴,且眼珠具有睁眼造型和闭眼造型,转动眼珠以使其自身于睁眼造型和闭眼造型之间切换。
12、在一些实施例中,嘴巴造型位于脸部轮廓造型的底部,其包括嘴洞和能量块;其中,能量块可拆装于嘴洞。
13、在一些实施例中,躯干区域设有镜面安装区,镜面安装在镜面安装区。
14、在一些实施例中,躯干区域设有安装洞,安装洞安装有螺纹杆,螺母螺接于螺纹杆。
15、在一些实施例中,躯干区域设有发声按钮,发声按钮用于启闭发声装置。
16、在一些实施例中,躯干区域设有心跳曲线槽,红心滑块滑动安装在心跳曲线槽。
17、在一些实施例中,躯干区域转动安装有旋转件,旋转件设有旋转其自身的驱动部,驱动部由限定数量的手指握持部。
18、在一些实施例中,躯干区域转动安装有旋转件,旋转件设有旋转其自身的驱动部,驱动部由限定数量的手指握持部,相邻设置的两个旋转件啮合连接。
19、通过上述技术方案,本公开提供的机器人学步车,包括如下有益效果:
20、本公开的前后两端分别设有四个车轮,且后端的一对车轮位于用于儿童站立行走的行走空间的两侧,使得儿童握持把手时所站立的位置的前后均有支撑,如此在儿童行走过程中,因前后均有车轮支撑(即儿童前后都有车轮支撑,本公开的受力点位于儿童的四周)不易发生翻车现象,结构稳定牢靠性能良好形成学步辅助,且本公开为拟人态(具有头部造型、躯干造型、手臂等)对儿童具有很强亲和力和吸引力,本公开还可根据儿童的身高(年龄段)调整把手的安装高度,适应性强且能够给儿童营造良好且不同的行走姿态。
技术特征:
1.一种机器人学步车,其特征在于,包括:
2.根据权利要求1所述的机器人学步车,其特征在于,所述把手(1)包括:
3.根据权利要求1所述的机器人学步车,其特征在于,所述右侧板(2)设有立体块安装洞以及可拆装于该立体块安装洞的立体块。
4.根据权利要求1所述的机器人学步车,其特征在于:
5.根据权利要求1所述的机器人学步车,其特征在于:
6.根据权利要求1所述的机器人学步车,其特征在于,所述头部区域(501)具有头发造型、脸部轮廓造型、眼睛造型和嘴巴造型。
7.根据权利要求6所述的机器人学步车,其特征在于:
8.根据权利要求1-7任意一项所述的机器人学步车,其特征在于:
9.根据权利要求1-7任意一项所述的机器人学步车,其特征在于,
10.根据权利要求1-7任意一项所述的机器人学步车,其特征在于:
技术总结
本公开提供一种机器人学步车,属于学步车技术领域。该机器人学步车包括:把手、右侧板、左侧板、底板、面板、右手臂、左手臂和车轮;其中,左侧板和右侧板分设于底板的左右相对两侧;面板设于底板的前侧且朝后倾斜设置以使底板的后侧空间形成行走空间,面板具有头部造型的头部区域和具有躯干造型的躯干区域;把手安装在面板的上端且可沿面板的倾斜方向做往复运动;右手臂安装在右侧板;左手臂安装在左侧板;车轮分别安装在右侧板和左侧板的前端和后端且位于后端的一对车轮位于行走空间的左右两侧。本公开结构稳定牢靠性能良好,拟人态对儿童具有很强亲和力和吸引力,适应不同儿童的身高(年龄段),适应性强且能够营造良好且不同的行走姿态。
技术研发人员:肖霞芬
受保护的技术使用者:宁波市恒兴玩具有限公司
技术研发日:20230526
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!