清洁机器人的制作方法
本申请属于清洁机器,尤其涉及一种清洁机器人。
背景技术:
1、清洁机器人在清扫的过程中,碰撞挡杆经常会碰到如桌椅、茶几、衣柜等物件,当碰撞挡杆发生碰撞且被驱动转动时,控制装置将根据碰撞信号控制清洁机器人及时转向清扫,但是,由于碰撞挡杆套装于机壳上的固定柱上,在碰撞过程中,碰撞挡杆将与固定柱不断摩擦,导致固定柱磨损,影响碰撞的触发精度。
技术实现思路
1、本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出一种清洁机器人,解决现有技术中在碰撞过程中,碰撞挡杆与固定柱不断摩擦,导致固定柱磨损,影响碰撞的触发精度的问题。
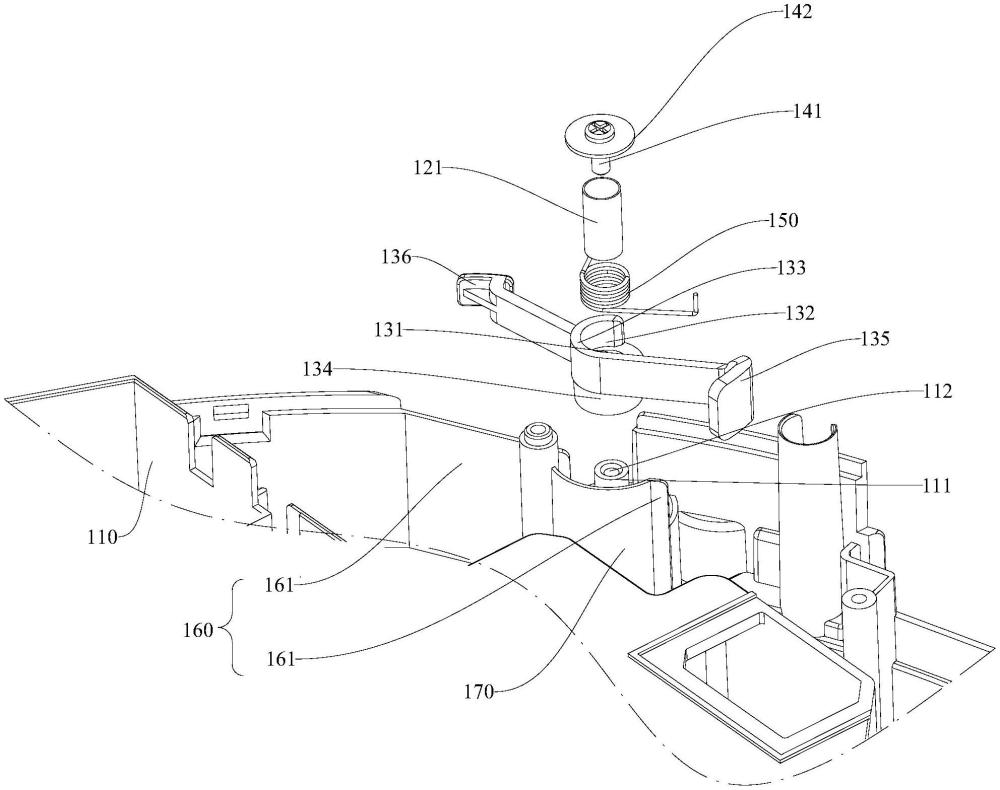
2、第一方面,本申请提供了一种清洁机器人,包括:
3、机壳,所述机壳设有固定柱;
4、防护件,设于所述固定柱的外壁面;
5、碰撞挡杆,外套于所述固定柱,所述防护件设于所述固定柱和所述碰撞挡杆之间。
6、根据本申请的清洁机器人,通过在所述固定柱的外壁面设置防护件,由于所述防护件的存在,使得所述固定柱的强度和耐磨性得以提高,在碰撞过程中,所述碰撞挡杆将不会与固定柱发生摩擦,提高了所述固定柱的使用寿命,且保证了所述固定柱的完整性,所述碰撞档杆在被驱动转动过程中,可以始终绕着所述固定柱的轴线转动,而不会沿所述固定柱的径向活动,保证了所述碰撞挡杆的触发精度和灵敏度。
7、根据本申请的一个实施例,所述防护件包括防护套筒,所述防护套筒止转外套于所述固定柱。
8、根据本申请的一个实施例,还包括止转部,所述止转部与所述固定柱背离所述机壳的一端相连,所述止转部与所述防护套筒背离所述机壳的端面相抵接。
9、根据本申请的一个实施例,还包括复位件,所述复位件设于所述碰撞挡杆和所述机壳之间,且为所述碰撞挡杆提供保持在初始位置的力。
10、根据本申请的一个实施例,所述复位件包括扭簧,所述扭簧外套于所述固定柱,且所述扭簧的一端与所述碰撞挡杆相连,另一端与所述机壳相连。
11、根据本申请的一个实施例,所述碰撞挡杆上设置有容纳槽;
12、所述扭簧的主体部位于所述容纳槽内,且套装于所述固定柱。
13、根据本申请的一个实施例,所述碰撞挡杆包括:
14、转动套筒,所述转动套筒外套于所述固定柱;
15、挡杆,所述挡杆的一端与所述转动套筒相连,另一端适于处于光电开关的发射端和接收端之间;
16、碰撞杆,所述碰撞杆的一端与所述转动套筒相连,另一端适于被驱动转动。
17、根据本申请的一个实施例,沿所述转动套筒的轴线方向,所述挡杆与所述碰撞杆呈错位设置。
18、根据本申请的一个实施例,所述机壳还设置有限位组件,所述限位组件包括两个限位部,在所述碰撞挡杆转动过程中,所述碰撞挡杆适于分别与两个所述限位部相抵接。
19、根据本申请的一个实施例,两个所述限位部设于所述碰撞挡杆的一侧。
20、本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种清洁机器人,其特征在于,包括:
2.根据权利要求1所述的清洁机器人,其特征在于,所述防护件包括防护套筒,所述防护套筒止转外套于所述固定柱。
3.根据权利要求2所述的清洁机器人,其特征在于,还包括止转部,所述止转部与所述固定柱背离所述机壳的一端相连,所述止转部与所述防护套筒背离所述机壳的端面相抵接。
4.根据权利要求1至3中任意一项所述的清洁机器人,其特征在于,还包括复位件,所述复位件设于所述碰撞挡杆和所述机壳之间,且为所述碰撞挡杆提供保持在初始位置的力。
5.根据权利要求4所述的清洁机器人,其特征在于,所述复位件包括扭簧,所述扭簧外套于所述固定柱,且所述扭簧的一端与所述碰撞挡杆相连,另一端与所述机壳相连。
6.根据权利要求5所述的清洁机器人,其特征在于,所述碰撞挡杆上设置有容纳槽;
7.根据权利要求1至3中任意一项所述的清洁机器人,其特征在于,所述碰撞挡杆包括:
8.根据权利要求7所述的清洁机器人,其特征在于,沿所述转动套筒的轴线方向,所述挡杆与所述碰撞杆呈错位设置。
9.根据权利要求1所述的清洁机器人,其特征在于,所述机壳还设置有限位组件,所述限位组件包括两个限位部,在所述碰撞挡杆转动过程中,所述碰撞挡杆适于分别与两个所述限位部相抵接。
10.根据权利要求9所述的清洁机器人,其特征在于,两个所述限位部设于所述碰撞挡杆的一侧。
技术总结
本申请公开了一种清洁机器人,属于清洁机器技术领域。清洁机器人包括机壳、防护件以及碰撞挡杆,机壳设有固定柱,防护件设于固定柱的外壁面,碰撞挡杆外套于固定柱,防护件设于固定柱和碰撞挡杆之间,通过在固定柱的外壁面设置防护件,由于防护件的存在,使得固定柱的强度和耐磨性得以提高,在碰撞过程中,碰撞挡杆将不会与固定柱发生摩擦,提高了固定柱的使用寿命,且保证了固定柱的完整性,碰撞档杆在被驱动转动过程中,可以始终绕着固定柱的轴线转动,而不会沿固定柱的径向活动,保证了碰撞挡杆触发精度和灵敏度。
技术研发人员:赵俊才
受保护的技术使用者:深圳市杉川机器人有限公司
技术研发日:20230724
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!