清洁机器人和清洁系统的制作方法
本公开涉及清洁,特别是涉及一种清洁机器人和清洁系统。
背景技术:
1、清洁机器人作为一种智能家电,对室内环境的待清洁表面(又称为环境表面)进行清洁,在人们的日常生活中发挥越来越重要的作用。以扫地机器人为例,其工作系统通常包括:吸尘系统、行走系统及供电系统。为了提升清洁机器人的清洁效率,相关技术中对清洁机器人的改进多集中在机身结构的改进、对吸尘功率的提升或者对智能化程度的提升等方面,但在清洁机器人实际应用场景中,仍然存在清洁效率偏低的问题。
技术实现思路
1、基于此,有必要针对上述问题,提供一清洁机器人和清洁系统。通过改进吸尘系统的结构,为策略性提高清洁机器人的清洁效率提供了解决方案。如下具体说明:
2、本公开的第一方面,提供一种清洁机器人,所述清洁机器人包括:
3、主体,其具有前端;
4、移动组件,设置于所述主体上,支撑并带动所述清洁机器人在待清洁区域的环境表面上移动;
5、控制器,控制所述清洁机器人自动在所述环境表面上执行清洁工作;
6、吸尘组件,设置于所述主体上,对环境表面执行清洁工作;
7、其中,所述吸尘组件包括滚刷组件、用于收容所述滚刷组件的腔体、位于滚刷组件前侧的第一挡板和位于滚刷组件后侧的第二挡板;
8、所述滚刷组件包括第一滚刷和第二滚刷,所述第一滚刷和所述第二滚刷前后布置,其中,所述第一滚刷靠近所述主体的所述前端;
9、所述第一挡板和所述第二挡板均具有靠近所述环境表面的自由端;
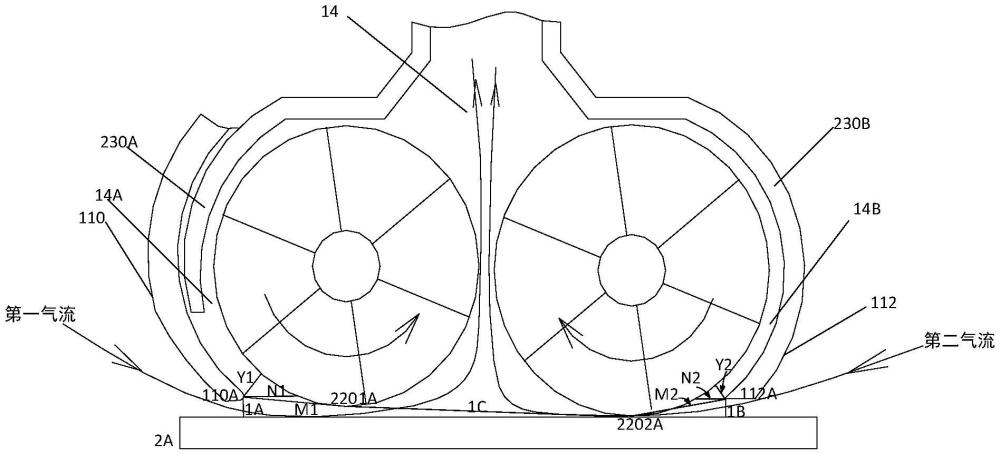
10、在所述清洁机器人处于硬质地面的情况下,所述第一挡板的自由端与所述硬质地面形成的第一开口部具有第一面积,所述第二挡板的自由端与所述硬质地面形成的第二开口部具有第二面积,其中所述第一面积与所述第二面积的比值在0.7-1.3的范围内;所述第一挡板的自由端与所述硬质地面相距的最小距离为第一距离,所述第二挡板的自由端与所述硬质地面相距的最小距离为第二距离;其中所述第一距离小于5mm,所述第二距离小于5mm,所述第一距离和所述第二距离的高度差在3mm以内,使得所述第一滚刷和第二滚刷沿相反且相向的方向旋转时,第一气流自所述腔体外部、从所述第一挡板下经所述第一滚刷的底部向所述第一滚刷和所述第二滚刷之间的空间流动,第二气流自所述腔体外部、从所述第二挡板下经所述第二滚刷的底部向所述第一滚刷和所述第二滚刷之间的空间流动。
11、在其中一个实施例中,在所述清洁机器人处于地毯上,且第一挡板的自由端和第二挡板的自由端与该地毯接触的情况下,所述第一气流和第二气流能够集中地从该地毯的内部流过。
12、在其中一个实施例中,所述清洁机器人包括吸尘风机,用于产生负压;
13、在所述清洁机器人处于地毯,且第一挡板的自由端和第二挡板的自由端与该地毯接触时,从所述地毯内部的流过的气流的流量占所述腔体的进尘口处流出的气流的流量的70%及以上。
14、在其中一个实施例中,所述第一距离大于或等于所述第二距离,所述第一距离与第二距离的差值在2mm以内。
15、在其中一个实施例中,所所述第一挡板的自由端与所述第一滚刷的最低位置点相距的最小距离为第三距离,其中第三距离小于15mm,将所述第一气流导向所述第一滚刷的底部;
16、所述第二挡板的自由端与所述第二滚刷的最低位置点相距的最小距离为第四距离,其中第四距离小于15mm,将所述第二气流导向所述第二滚刷的底部。
17、在其中一个实施例中,所述第一挡板的自由端与所述第一滚刷的最低位置点的连线的长度小于所述第一滚刷的最低位置点与所述第二滚刷的最低位置点的距离。
18、在其中一个实施例中,所述第一挡板至少具有一不同于第一挡板的自由端的中间点,其中,所述中间点与第一滚刷的最低位置的距离大于所述第三距离,所述中间点在水平面上的投影与所述自由端指向所述第一滚刷的最低位置。
19、在其中一个实施例中,所述第一距离小于所述第一滚刷的最低位置点与所述第二滚刷的最低位置点距离。
20、在其中一个实施例中,所述第一挡板的自由端与所述第一滚刷的外轮廓相距第一水平距离,所述第一水平距离小于等于5mm;所述第二挡板的自由端与所述第二滚刷相距第二水平距离,所述第二水平距离小于等于5mm;
21、或者,所述第一挡板的自由端与所述第一滚刷的外轮廓的最小距离小于等于4mm;所述第二挡板的自由端与所述第二滚刷的外轮廓的最小距离小于等于4mm。
22、在其中一个实施例中,所述腔体具有连向吸尘风机的进尘口;
23、第一滚刷沿第一方向旋转,第二滚刷沿第二方向旋转,第二方向与第一方向相反且相向;
24、所述第一挡板的自由端与所述第一滚刷相距第一水平距离,形成气流进入的第一入口,所述第一滚刷沿第一方向旋转以阻碍经所述第一入口沿第一滚刷的外轮廓与第一挡板之间的空间向所述腔体的进尘口流动的气流;
25、所述第二挡板的自由端与所述第二滚刷相距第二水平距离,形成供气流进入的第二开口,所述第二滚刷沿第二方向旋转以阻碍经所述第二开口沿第二滚刷的外轮廓与第一挡板之间的空间向所述进尘口流动的气流。
26、在其中一个实施例中,所述第一挡板和第二挡板的材质的硬度均大于等于80ha。
27、在其中一个实施例中,所述第一挡板可活动,以调节所述第一挡板的自由端与硬质地面的距离,使得所述第一挡板具有关闭状态和开启状态;
28、其中,所述第一挡板处于关闭状态时,所述第一挡板的自由端与硬质地面相距所述第一距离;
29、所述第一挡板处于开启状态时,所述第一挡板的自由端与硬质地面的距离大于所述第一距离。
30、在其中一个实施例中,所述吸尘组件包括壳体,所述壳体包括至少部分覆盖第一滚刷的第一滚刷支架部,所述第一挡板可活动地设置于第一滚刷支架部,以对第一滚刷进行遮挡。
31、在其中一个实施例中,所述壳体还包括至少部分覆盖第二滚刷的第二滚刷支架部,所述第二挡板为所述第二滚刷支架部的一部分,以对第二滚刷进行遮挡;所述第一滚刷支架部和所述第二滚刷支架部围设形成用于收纳所述滚刷组件的所述腔体。
32、在其中一个实施例中,第一挡板处于开启状态下,所述第一气流与所述第二气流的差值为δ1;所述第一挡板处于关闭状态下,所述第一气流与所述第二气流的差值为δ2;其中δ2小于δ1。
33、在其中一个实施例中,所述第一挡板处于关闭状态下,所述腔体的某一位置处的真空度大于所述第一挡板处于开启状态下,所述腔体的该同一位置处的真空度。
34、在其中一个实施例中,所述第一挡板处于关闭状态下,所述腔体的进尘口具有第一真空度,第一挡板处于开启状态下,所述腔体的进尘口具有第二真空度,其中第一真空度大于第二真空度。
35、在其中一个实施例中,所述第二挡板可活动,以调节所述第二挡板的自由端与硬质地面的距离,使得所述第二挡板具有关闭状态和开启状态;
36、所述第二挡板处于关闭状态时,所述第二挡板的自由端与硬质地面的距离相距所述第二距离;
37、所述第二挡板处于开启状态时,所述第二挡板的自由端与硬质地面的距离大于所述第二距离。
38、在其中一个实施例中,所述吸尘组件包括壳体,所述壳体包括用于至少部分覆盖并支撑所述滚刷组件的滚刷支架,所述滚刷支架被配置为相对水平面能上下浮动;
39、所述滚刷组件设置在所述滚刷支架上,所述滚刷组件随着所述滚刷支架的浮动而浮动。
40、在其中一个实施例中,所述壳体包括滚刷盖,所述滚刷盖设置于所述壳体的靠近所述滚刷组件的朝向环境表面的一侧,所述滚刷盖具有与所述滚刷支架连接的连接部,所述连接部包括两个;沿平行于所述旋转轴的方向,两个所述连接部分别设置于所述第一挡板的两侧。
41、在其中一个实施例中,所述第一挡板被配置为能够沿上下方向浮动。
42、在其中一个实施例中,所述第一挡板被配置为与所述滚刷支架同步浮动。
43、在其中一个实施例中,所述第一挡板设置在所述滚刷支架上。
44、在其中一个实施例中,所述吸尘组件包括用于驱动第一挡板的挡板驱动组件以及用于驱动所述滚刷组件旋转的滚刷驱动组件,所述挡板驱动组件和所述滚刷驱动组件均设置于所述滚刷支架上,使得挡板驱动组件和所述滚刷驱动组件均随着所述滚刷支架的浮动而浮动。
45、在其中一个实施例中,所述第一挡板与所述第一滚刷支架部之间设置有筋条,所述筋条用于引导挡板沿第一滚刷支架部活动。
46、在其中一个实施例中,沿滚刷组件的长度方向,所述第一挡板与所述第一滚刷支架部之间设有密封条。
47、在其中一个实施例中,所述吸尘组件包括用于驱动滚刷组件旋转的滚刷电机以及用于驱动第一挡板运动的驱动电机,其中所述滚刷电机和所述驱动电机布置在滚刷组件的两端。
48、在其中一个实施例中,所述清洁机器人包括用于带动所述吸尘组件抬升的抬升机构,所述抬升机构包括所述驱动电机,所述驱动电机还被配置为驱动所述吸尘组件沿上下方向作升降运动。
49、在其中一个实施例中,所述第一挡板可旋转活动,以调节第一挡板的自由端相对环境表面的高度,所述第一挡板的旋转轴与所述第一滚刷和所述第二滚刷中的至少一个的旋转轴不重叠。
50、在其中一个实施例中,所述吸尘组件包括用于驱动所述第一挡板运动的驱动系统以及用于将所述驱动系统的驱动力传递到所述第一挡板的传动系统;所述驱动系统包括驱动电机,所述传动系统包括齿轮组,所述驱动电机的输出轴与所述齿轮组之间具有间隙。
51、在其中一个实施例中,所述吸尘组件具有防撞部,沿所述主体的前端方向,所述防撞部至少具有位于所述第一挡板的前部的部分,且该位于所述第一挡板的前部的部分与所述第一挡板无连接关系,以在所述清洁机器人与障碍物产生碰撞时接触障碍物。
52、在其中一个实施例中,所述吸尘组件包括壳体,所述壳体具有至少部分覆盖所述第一滚刷的第一滚刷支架部,所述防撞部包括设置于所述第一滚刷支架部的外侧壁上,且凸出于所述第一挡板的凸起。
53、在其中一个实施例中,所述清洁机器人包括地面类型检测装置,用于检测地面类型;
54、所述控制器被配置为当所述检测装置检测地面类型为硬质地面时,控制所述第一挡板打开;当检测到地面类型为软地面时,控制所述第一挡板关闭。
55、在其中一个实施例中,所所述清洁机器人包括环境检测装置,用于检测异物类型;
56、当清洁机器人在软地面执行清洁工作时,所述控制器至少被配置为当环境检测装置识别到异物类型为尺寸满足预设条件的垃圾时,控制所述第一挡板由关闭状态切换至打开状态。
57、在其中一个实施例中,所述清洁机器人具有深度清洁模式和常规清洁模式,其中,所述深度清洁模式下所述清洁机器人具有第一清洁参数,所述常规清洁模式下,所述清洁机器人具有第二清洁参数,所述第一清洁参数不同于所述第二清洁参数,其中,所述清洁参数至少包括以下参数的一项:第一挡板的状态、移动速度、风机功率;
58、所述清洁机器人在对软地面执行清洁操作的情况下,所述控制器控制所述清洁机器人在两种清洁模式之间切换,以交替执行所述清洁操作。
59、在其中一个实施例中,在所述深度清洁模式下,所述第一挡板处于关闭状态;在所述常规清洁模式下,所述第一挡板处于打开状态。
60、在其中一个实施例中,所述控制器被配置为控制所述清洁机器人按照自然日交替执行所述深度清洁模式和常规清洁模式交替,其中,相邻两个自然日中,所述清洁机器人的清洁模式不同;
61、或者,所述控制器被配置为控制所述清洁机器人按照次数交替执行所述深度清洁模式和常规清洁模式交替,其中,清洁机器人完成对环境表面的遍历称为一次,相邻两次中,所述清洁机器人的清洁模式不同。
62、在其中一个实施例中,所述清洁机器人在对软地面执行清洁操作的情况下,所述控制器控制所述清洁机器人先采用深度清洁模式对所述软地面进行清洁,然后对所述软地面进行至少一遍沿边清洁,且在第一遍沿边清洁时,所述清洁机器人处于常规清洁模式。
63、在其中一个实施例中,所述第一挡板的外侧壁限定有引导面,所述引导面朝向所述第一滚刷倾斜设置,并与水平面呈锐角设置;所述第一挡板处于关闭状态下,所述引导面至少部分相对于所述滚刷支架更靠近所述环境表面。
64、在其中一个实施例中,所述清洁机器人包括环境检测装置,检测环境中的障碍物;在环境检测装置识别到尺寸满足预设条件的障碍物的情况下,所述控制器控制所述第一挡板关闭。
65、在其中一个实施例中,所述清洁机器人包括风机,所述风机的功率大于等于60w。
66、本公开的另一方面,提供一种清洁系统,包括上述的清洁机器人,以及供所述清洁机器人停靠的基站,所述基站还用于对所述清洁机器人进行维护。
67、在其中一个实施例中,所述清洁机器人包括集尘盒,所述基站包括集尘风机,用于执行集尘维护操作;当所述基站对所述集尘盒进行集尘维护时,所述第一挡板和所述第二挡板中的至少一个处于打开状态。
68、在其中一个实施例中,所述集尘盒内设置有过滤装置,当所述基站对所述过滤装置进行集尘维护时,所述第一挡板和所述第二挡板至少在部分时间内处于关闭状态。
69、在其中一个实施例中,所述基站包括进风通道,连通外部和所述腔体底部的至少一处间隙。
70、本公开的另一方面,提供一种清洁机器人,所述清洁机器人包括:
71、主体,其具有前端;
72、移动组件,设置于所述主体上,支撑并带动所述清洁机器人在待清洁区域的环境表面上移动;
73、控制器,控制所述清洁机器人自动在所述环境表面上执行清洁工作;
74、吸尘组件,设置于所述主体上,对环境表面执行清洁工作;
75、其中,所述吸尘组件包括滚刷组件、用于收容所述滚刷组件的腔体、位于滚刷组件前侧的第一挡板和位于滚刷组件后侧的第二挡板;
76、所述滚刷组件包括第一滚刷和第二滚刷,所述第一滚刷和所述第二滚刷前后布置,其中,所述第一滚刷靠近所述主体的所述前端;
77、所述第一挡板和所述第二挡板均具有靠近所述环境表面的自由端;
78、在所述清洁机器人处于地毯上,且该地毯的绒毛长度大于预设长度的情况下,所述第一挡板的自由端、所述第二挡板的自由端与该地毯接触,使得第一气流自腔体外部经该地毯的内部向所述腔体的进尘口流动,第二气流自腔体外部经该地毯的内部向所述进尘口流动;所述第一气流与第二气流的比值大于等于0.7,小于等于1.3。
79、本公开的另一方面,提供一种清洁机器人,所述清洁机器人包括:
80、主体,其具有前端;
81、移动组件,设置于所述主体上,支撑并带动所述清洁机器人在待清洁区域的环境表面上移动;
82、控制器,控制所述清洁机器人自动在所述环境表面上执行清洁工作;
83、吸尘组件,设置于所述主体上,对环境表面执行清洁工作;
84、其中,所述吸尘组件包括滚刷组件、用于收容所述滚刷组件的腔体、位于滚刷组件前侧的第一挡板和位于滚刷组件后侧的第二挡板;
85、所述滚刷组件包括第一滚刷和第二滚刷,所述第一滚刷和所述第二滚刷前后布置,其中,所述第一滚刷靠近所述主体的所述前端;
86、所述第一挡板和所述第二挡板均具有靠近所述环境表面的自由端;
87、在所述清洁机器人处于硬质地面的情况下,所述第一挡板的自由端与所述硬质地面形成的第一开口部具有第一面积,所述第二挡板的自由端与所述硬质地面形成的第二开口部具有第二面积,其中所述第一面积与所述第二面积的比值在0.7-1.3的范围内;所述第一挡板的自由端与所述硬质地面相距的最小距离为第一距离,所述第二挡板的自由端与所述硬质地面相距第二距离;其中第一距离小于5mm,第二距离小于5mm,第一距离和所述第二距离的差值在3mm以内,使得所述第一滚刷对环境表面拍打形成第一拍打区域,所述第二滚刷对环境表面拍打形成第二拍打区域时,第一气流自腔体外部经所述第一拍打区域向所述腔体的进尘口流动,第二气流自腔体外部经所述第二拍打区域向所述进尘口流动;所述进尘口可与产生负压的吸尘风机连通。
88、本公开的清洁机器人和清洁系统,在原有吸尘机构的基础上设置密封调节结构使其至少在部分时段内对所述吸尘口产生的负压进行调节或稳定,以策略性提高清洁机器人的清洁效率。
- 还没有人留言评论。精彩留言会获得点赞!