壁面清洁机器人清扫组件的升降结构及壁面清洁机器人的制作方法
本发明涉及墙面清洁设备,具体涉及一种壁面清洁机器人清扫组件的升降结构及壁面清洁机器人。
背景技术:
1、爬壁机器人是可以在垂直墙壁上攀爬并完成作业的自动化机器人,爬壁机器人又称为壁面移动机器人,因为垂直壁面作业超出人的极限,因此在国外又称为极限作业机器人,爬壁机器人必须具备吸附和移动两个基本功能;现阶段,爬壁机器人被广泛应用于清洁行业,将爬壁机器人和清扫结构相结合组成壁面清洁机器人,壁面清洁机器人可以代替人工完成对高楼墙面的清洗工作,可进行包括玻璃、铝板以及石材等各种不同类型的幕墙表面清洁作业。
2、壁面清洁机器人在进行墙面清洁工作时,由于对不同类型的幕墙清洁需要清扫机构与壁面的距离不同,因而,需要对其清扫机构进行朝向靠近或远离壁面的方向移动以调节位置,保证清洁效果;然而,由于壁面清洁机器人的特殊性,其需要吸附在高空墙面上且进行移动,所以,若采用气缸作为驱动件对清扫机构进行伸缩调节,则因为气源和气路的设置,使得壁面清洁机器人的结构过于复杂,且负载过重,不能很好的满足壁面清洁的效果。因而,目前大多采用电机配合传动结构实现,传统的方式需要电机配合滚珠丝杠、涡轮蜗杆或者齿轮齿条将电机的转动力转化为清扫机构线性升降的驱动力,而壁面清洁机器人壳体内部空间有限,上述结构在壁面清洁机器人机体上都很难安装,同时结构较为复杂,很大程度上增加壁面清洁机器人的整体质量,壁面清洁机器人质量过重会导致其爬行时速度缓慢或者吸附不稳定,存在从墙面坠落的情况。
3、应该注意,上面对技术背景的介绍只是为了方便对本发明的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本发明的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
技术实现思路
1、为克服上述缺点,本发明的目的在于提供一种壁面清洁机器人清扫组件的升降结构及壁面清洁机器人,从而有效地解决上述技术问题。
2、为了达到以上目的,本发明采用的技术方案是:一种壁面清洁机器人清扫组件的升降结构,所述升降结构用以驱动壁面清洁机器人中的清扫组件升降,其包括:
3、可旋转的转动部;
4、摆动部,与所述清扫组件固定连接,同时与所述转动部旋转中心的偏心部位活动连接,所述转动部在旋转时可带动所述摆动部摆动,以使所述清扫组件朝向靠近或远离壁面的方向移动。
5、本发明的有益效果为:本方案设计的一种壁面清洁机器人清扫组件的升降结构,采用圆形转动部以及其偏心部位连接的摆动部组成用以带动清扫组件升降的升降结构,在保证足够驱动力的前提下,整个清扫组件可以升降,以调节清扫组件朝向靠近或远离壁面的方向上的位置,整个驱动结构简单,在壁面清洁机器人机体上安装方便,在保证足够驱动力的前提下,采用轻量化的升降驱动结构来减轻壁面清洁机器人整体的质量,使壁面清洁机器人在墙体爬行时更加快速且安全可靠。
6、进一步地,所述转动部包括至少一个可旋转的盘体,所述盘体的圆心部位与驱动电机同轴连接;转动部采用圆盘结构,在保证圆盘强度的前提下,可以尽可能地使圆盘的厚度更薄,从而减轻圆盘的质量,使整个升降驱动结构更加轻量化;另外,圆盘可以采用铝合金、镁合金或者钛合金等轻便且高强度的合金材质,进一步减轻壁面清洁机器人的质量。
7、进一步地,所述摆动部包括支撑位和摆动位,所述支撑位与所述清扫组件固定连接,所述摆动位上开设有腰型孔,所述转动部的偏心位置固定设置有滚轮,所述滚轮可移动地设置于所述腰型孔内;当转动部旋转时,其偏心位置的滚轮会在摆动部的腰型孔内移动,同时滚轮可带动摆动部进行摆动,此时,摆动部的摆动位相当于一根摇杆,摇杆在摆动的同时会带动其端部支撑位的整个清扫组件升降,在此结构中,整体采用了连杆驱动原理,结构简单可靠,既能起到有效的传动效果,还能减轻壁面清洁机器人的整体质量,使壁面清洁机器人更加轻巧。
8、进一步地,所述转动部包括第一圆盘和第二圆盘,所述第一圆盘和所述第二圆盘以驱动电机为中心左右对称,且所述第一圆盘和所述第二圆盘分别与所述驱动电机的左右两个输出端同轴连接;采用两个对称的圆盘作为左右对称的传动结构,当驱动电机工作时,电机两侧的第一圆盘和第二圆盘会同步转动,而圆盘对应的摆动结构分别会从两侧带动整个清扫机构进行上下摆动,此结构可以提高清扫结构整体升降的稳定性。
9、进一步地,所述升降结构还包括导向杆,所述导向杆通过轴套可升降地设置在所述壁面清洁机器人的机体上,所述导向杆的底部与所述清扫组件固定连接;当驱动电机带动圆盘转动时,与圆盘偏心部位连接的摆动部会绕圆盘的圆盘进行摆动,由于摆动部与清扫机构固定连接,所以摆动部会带着清扫机构摆动,然而设备只需要清扫机构进行上下升降,为了避免清扫机构出现大幅度摆动,通过设置导向杆对清扫机构进行导向,使摆动部在带动清扫机构时,清扫机构在导向杆的作用下进行直线升降。
10、进一步地,所述导向杆上套设有缓冲弹簧;设置在导向杆上的缓冲弹簧起到缓冲减震的作用,可以使整个清扫机构有一个上下浮动的余量,因为壁面清洁机器人爬行的墙体上会存在凹凸不平的地方,从结构可以起到清扫机构与墙面凸起部位不会出现硬接触、与墙面凹陷部位保持贴合的效果,进一步提高清扫机构的清洁效果。
11、本发明还公开了一种壁面清洁机器人,其包括:
12、机壳;
13、清扫机构,用于清扫壁面清洁机器人爬行区域;
14、吸附机构,用于使壁面清洁机器人贴附在爬行区域墙面上;
15、行走机构,用于带动壁面清洁机器人在爬行区域平移;
16、上述的升降结构。
17、本方案设计的一种壁面清洁机器人,该壁面清洁机器人上设置有清扫机构,其主要用于对楼体外幕墙进行清洁,吸附机构可让壁面清洁机器人贴附在爬行区域墙面上,行走机构可用于带动壁面清洁机器人在爬行区域平移,同时上述的升降结构带动清扫机升降,具备相同的技术效果。
18、进一步地,所述清扫机构包括除尘部,所述除尘部包括滚刷模块和吸尘模块,所述滚刷模块和所述吸尘模块前后对应设置,所述滚刷模块用于清扫灰尘墙面灰尘,所述吸尘模块用于吸附灰尘;前后对应设置的滚刷模块和吸尘模块配合工作,滚刷模块可以先对墙面进行灰尘清扫,然后吸尘模块可吸附清扫的灰尘。
19、进一步地,所述滚刷模块包括滚筒和驱动所述滚筒转动的电机;
20、所述吸尘模块包括吸尘管道和尘盒,所述吸尘管道的入口与所述滚筒对应设置,所述吸尘管道的出口连通至所述尘盒内部;电机带动滚筒转动,滚筒对墙面进行清扫灰尘,清扫的灰尘被吸尘管道吸附并收集进入尘盒内部。
21、进一步地,所述机壳内部设置有入尘仓,所述入尘仓的入口处设置有导向板,所述导向板与所述滚筒的旋转轨迹相切,且所述吸尘管道的入口连通至所述入尘仓内部;入尘仓设置在滚筒的后端,爬行机器人在爬行过程中,滚筒的转动方向与爬行机器人的移动方向相反,滚筒在高速转动的过程中会将滚筒的上的灰尘以及粉尘颗粒物甩到入尘仓内,而在此过程中,导向板对灰尘和粉尘颗粒起到导向作用,进入入尘仓内部的灰尘和粉尘颗粒会被吸尘管道吸走并收集进入尘盒内。
22、进一步地,所述清扫机构包括拖洗部,所述拖洗部包括喷水模块和拖擦模块,所述喷水模块和所述拖擦模块前后对应设置,所述喷水模块用于在墙面喷水,所述拖擦模块用于拖擦墙面;前后对应设置的喷水模块和拖擦模块配合工作,喷水模块可以先对墙面进行喷水,然后拖擦模块可对喷水区域进行拖擦。
23、进一步地,所述喷水模块包括喷水板和连接所述喷水板的水箱,且在所述喷水板与所述水箱的连接水管处设置有水泵;水箱内储存干净的水,同时在壁面清洁机器人的顶部开设一个可以连通水箱内部的补水管,方便在设备不使用时对水箱内加水,当水泵工作时,将水箱内的水抽到喷水板内,喷水板的底面上开设有若干个均匀分布的喷水孔,通过喷水孔将水均匀喷在墙面上。
24、所述拖擦模块包括擦布板以及安装所述擦布板的支撑座,所述擦布板与所述喷水管前后对应且互相平行;当喷水板将水均匀喷在墙面上后,擦布板正好对喷水的墙面进行拖擦。
25、进一步地,所述吸附机构包括开设在所述机壳上的至少一个通孔,所述通孔位于机壳底部的端口为吸附口,所述通孔位于机壳顶部的端口为出气口,所述通孔内靠近所述吸附口处设置有风机;当风机工作时,机壳开设的通孔内产生负压,从而使吸附口产生吸力将整个壁面清洁机器人吸附在墙体上,风机产生的气流从通孔顶部的出气口排出。
26、进一步地,位于所述吸附口处的所述机壳表面设置有密封胶圈,所述密封胶圈凸出所述机壳底部表面;密封胶圈可对吸附口周围一圈与墙体贴合的区域进行密封,从而有效地保证吸附口的吸力,提高壁面清洁机器人在墙体上的吸附效果。
27、进一步地,所述滚筒设置于所述机壳的前端,所述喷水板和所述拖布板设置于所述机壳的后端,所述吸附口位于所述机壳的中间部位;壁面清洁机器人整体结构分为三个部分,第一部分是位于壳体前端的除尘部,在壁面清洁机器人在墙面上爬行的同时,滚筒对墙面进行清扫灰尘,清扫的灰尘被吸尘管道吸附并收集进入尘盒内部;第二部分是位于壳体中间部位的吸附机构,吸附机构中的吸附口产生吸力将壁面清洁机器人吸附在墙面上,将吸附口设置在壳体的中间部位,可以有效地保证对整个壁面清洁机器人的吸附效果,避免出现壁面清洁机器人因吸附效果不佳从墙面上脱落的情况;第三部分是位于壳体后端的拖洗部,当壳体前端的除尘部在对墙面进行灰尘清扫后,拖洗部中的喷水板将水均匀喷在墙面上,最后擦布板对喷水的墙面进行拖擦,以到达最佳的清洁效果;在上述结构中,第一部分的除尘部和第三部分的拖洗部,作为壁面清洁机器人前后两个的清扫机构均配备上述的升降结构,以使两个清扫部位能够进行升降调节,从而有效地保证清洁效果。
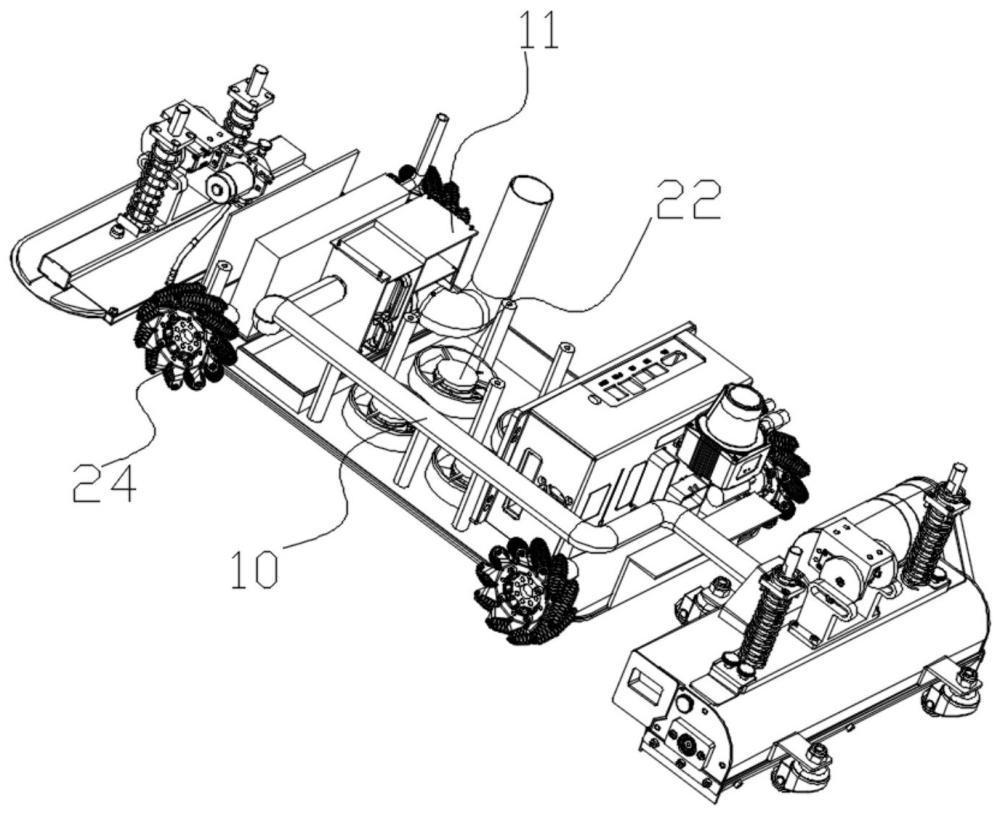
28、进一步地,所述行走机构包括设置于所述机壳两侧的至少两个对称的万向驱动轮,每个所述万向驱动轮均单独连接一个驱动电机;行走机构的作用是带动整个壁面清洁机器人在垂直的墙面上进行移动,本设备的行走机构采用以壳体对称的万向轮组,至少一组两个,也可以设置两组四个,每个万向轮均连接单独的微型电机进行驱动,万向轮采用麦克纳姆轮,麦克纳姆轮可以让壁面清洁机器人实现前行、横移、斜行、旋转及其组合等运动方式,并且在整个移动过程中,壳体可以始终保持前行方向,只需要轮子带动,在换向时,壳体不需要变换方向,从而可以让壳体与墙面始终保持一个不变的状态,进一步提高整个壁面清洁机器人在墙体上的吸附效果,且保证壁面清洁机器人在移动时的顺畅性。
29、进一步地,所述行走机构包括设置于所述机壳前端底部的至少一个导向轮;导向轮的作用是对壁面清洁机器人的移动起到导向的作用,其设置于壳体的前端,保证壁面清洁机器人在前进平移时不会出现位置偏移,至少设置一个,也可以设置左右对称的两个或者呈三角形分布的三个。
- 还没有人留言评论。精彩留言会获得点赞!