一种玻璃幕墙清洗机器人平台升降机构的制作方法
本申请涉及清洗设备,更具体地说,涉及一种玻璃幕墙清洗机器人平台升降机构。
背景技术:
1、目前,针对玻璃幕墙清洗机器人的上下移动作业,普遍利用绳索对机器进行升降操作,根据使用绳索数量主要分为以下两种:一种为采用一根绳索升降操作;另一种为使用多根绳索作业。然而,采用一根绳索升降作业时,清洗机器人很容易出现左右偏差或摇摆。采用多根绳索,则对绳索的速度统一要求较高,稍微出现速度偏差,机器就会出现倾斜晃动,稳定性较差,影响作业效率。
2、有鉴于此,如何设计一种稳定性好且防摆的玻璃幕墙清洗机器人平台升降机构,是本领域技术人员亟需解决的技术问题。
技术实现思路
1、本申请提供一种玻璃幕墙清洗机器人平台升降机构,解决了机器人清洗过程中受两侧绳索速度差的影响发生机身倾斜晃动、稳定性差的技术问题。
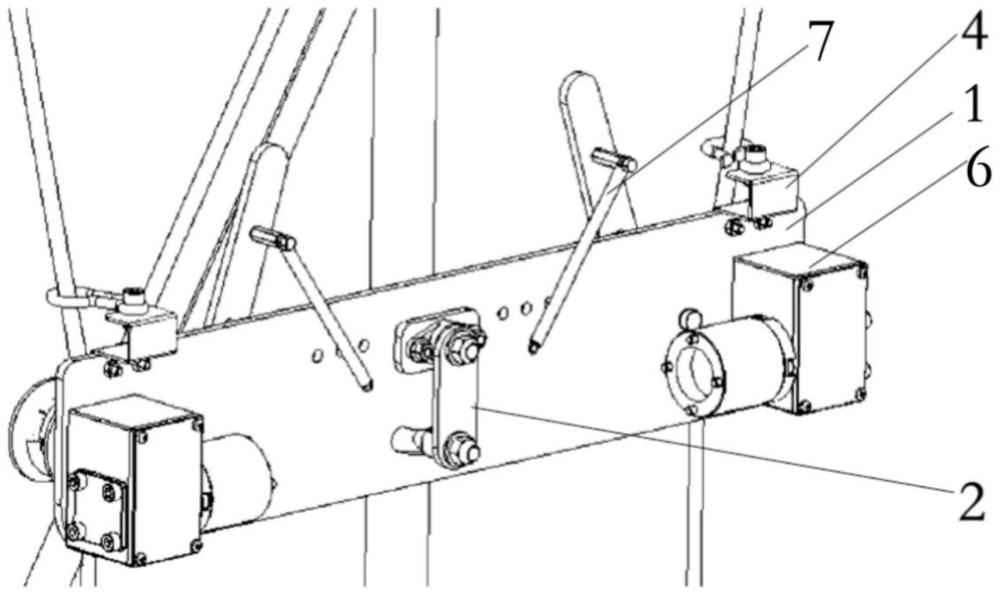
2、本申请提供一种玻璃幕墙清洗机器人平台升降机构,包括:
3、升降平台座,其上设有用以固定连接旋转调平组件的旋转调平组件安装部,所述旋转调平组件安装部的下部开设有以所述旋转调平组件的轴线为中心的圆弧形调平槽;
4、旋转调平组件,其上端固连于所述旋转调平组件安装部且穿过所述升降平台座夹固于主梁支架,下端穿过所述调平槽夹固于主梁支架;
5、两个挂钩支架,均一端固定连接所述升降平台座且另一端挂装侧部的绳索,且相对于所述旋转调平组件安装部对称分布;并配置为:
6、所述升降平台座受重力且在所述旋转调平组件的旋转调平作用下、以所述轴线为旋转中心沿所述调平槽自动调节位置,以使主梁支架始终保持竖直状态。
7、在一些实施例中,所述旋转调平组件包括:轴承座、轴承座固定轴、上螺母和上卡箍、轮轴、下螺母和下卡箍,所述轴承座固定轴贯穿所述连接板轴承座,所述轴承座的两端分别利用所述上螺母和所述上卡箍锁紧,所述上卡箍抱夹于所述主梁支架;所述轮轴贯穿所述连接板的下端并插入至所述调平槽并且两端分别利用所述下螺母和所述下卡箍锁紧,所述下卡箍抱夹于所述主梁支架升降平台座。
8、在一些实施例中,两个爬升装置集成安装在所述升降平台座上。
9、在一些实施例中,所述旋转调平组件设置于所述升降平台座的中部。
10、在一些实施例中,所述挂钩支架设置于弹性连接所述升降平台座与扳手的弹性件的外侧。
11、在一些实施例中,还包括设置于升降平台、用以检测升降平台水平度的陀螺仪,所述陀螺仪电连接控制器,控制器电连接两个所述爬升装置。
12、本申请所提供的玻璃幕墙清洗机器人平台升降机构,在清洗机器人清洁作业过程中,机器在爬升机构的作用下发生绳索的上下移动,在移位过程中因左右两侧绳子速度不一致时,升降平台座在重力下以及旋转调平组件的旋转调平作用下,通过旋转调平组件以轴线为旋转中心沿着圆弧形的调平槽自动调节位置以维持竖直状态,由于旋转调平组件的上下两端均固定连接主梁支架,进而使主梁支架始终保持竖直状态,实现了玻璃幕墙清洗作业过程中的位置自调节,从而确保主梁支架上的机器人不受绳索速度的影响而始终保持稳定的工作状态。本申请结构简单,安装方便,显著地提升了清洁作业效率,降低作业成本。
技术特征:
1.一种玻璃幕墙清洗机器人平台升降机构,其特征在于,包括:
2.根据权利要求1所述的玻璃幕墙清洗机器人平台升降机构,其特征在于,所述旋转调平组件(2)包括:轴承座(21)、轴承座固定轴(22)、上螺母(23)和上卡箍(24)、轮轴(25)、下螺母(26)、下卡箍(27)和连接板(29),所述轴承座固定轴(22)贯穿所述轴承座(21)并且两端分别利用所述上螺母(23)和所述上卡箍(24)锁紧,所述上卡箍(24)抱夹于所述主梁支架(5);所述轮轴(25)贯穿所述连接板(29)的下端并插入至所述调平槽(11),所述轴承座的两端分别利用所述下螺母(26)和所述下卡箍(27)锁紧,所述下卡箍(27)抱夹于所述主梁支架(5)升降平台座(1)。
3.根据权利要求2所述的玻璃幕墙清洗机器人平台升降机构,其特征在于,所述旋转调平组件(2)还包括设置于所述轴承座(21)与所述升降平台座(1)之间的加强安装板(28)。
4.根据权利要求1所述的玻璃幕墙清洗机器人平台升降机构,其特征在于,两个爬升装置(6)集成安装在所述升降平台座(1)上。
5.根据权利要求1~4任一项所述的玻璃幕墙清洗机器人平台升降机构,其特征在于,所述旋转调平组件(2)设置于所述升降平台座(1)的中部。
6.根据权利要求1所述的玻璃幕墙清洗机器人平台升降机构,其特征在于,所述挂钩支架(4)设置于弹性连接所述升降平台座(1)与扳手的弹性件(7)的外侧。
7.根据权利要求4所述的玻璃幕墙清洗机器人平台升降机构,其特征在于,还包括设置于升降平台(8)、用以检测升降平台(8)水平度的陀螺仪,所述陀螺仪电连接控制器,控制器电连接两个所述爬升装置(6)。
技术总结
本申请提供一种玻璃幕墙清洗机器人平台升降机构,包括:设有旋转调平组件安装部和圆弧形调平槽的升降平台座;旋转调平组件,其上端连接旋转调平组件安装部且下端穿过调平槽夹固于主梁支架;连接升降平台座与两侧绳索的两个挂钩支架。本申请通过对升降平台进行方案优化,在旋转调平组件和两个挂钩支架组件协同作用下,实现了主梁支架位置的自调节,以确保安装支架上的机器人不受两侧绳索速度差的影响而晃动和左右摇摆,提高了机器人作业效率,提升作业的安全性和稳定性。
技术研发人员:周四海,霍允帅,卢新城,高颖
受保护的技术使用者:苏州翼博特智能科技有限公司
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!