一种洗碗机的工作状态自动控制方法及装置与流程
本技术涉及控制,尤其涉及一种洗碗机的工作状态自动控制方法与装置。
背景技术:
1、超声波洗碗机是利用超声波雾化离子洁净餐具的装置。当超声波经过液体介质时,将以极高的频率压迫液体介质振动,使液体分子产生正负交变的冲击波。当声强达到一定数值时,液体中急剧生长微小空化气泡并瞬时强烈闭合,产生强烈的微爆炸和冲击波使被清洗物表面的污物遭到破坏,并从被清洗表面脱落下来。虽然每个空化气泡的作用并不大,但每秒钟有上亿个空化气泡在作用,就具有很好的清洗效果。
2、清洗过程中,被清洗表面污物扩散于液体介质中,对超声波洗碗机的洁净效果产生影响。
技术实现思路
1、本技术实施例提供一种洗碗机的工作状态自动控制方法与装置,以改善上述问题。
2、第一方面,本技术实施例提出了一种洗碗机的工作状态自动控制方法,适用于一种超声波洗碗机,超声波洗碗机具有用于容纳待清洗餐具的清洗腔以及红外传感器,红外传感器包括信号生成端与信号接收端,其中,待清洗餐具容纳于清洗腔内时,信号生成端与信号接收端之间的连线不与任意待清洗餐具之间发生干涉,超声波洗碗机还包括间隔设置于清洗腔的第一导体与第二导体,方法包括:
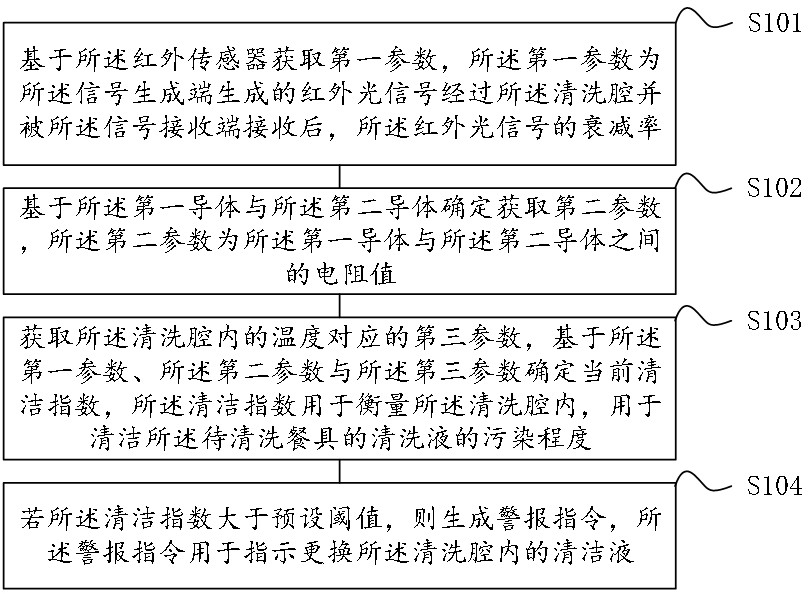
3、基于红外传感器获取第一参数,第一参数为信号生成端生成的红外光信号经过清洗腔并被信号接收端接收后,红外光信号的衰减率;
4、基于第一导体与第二导体确定获取第二参数,第二参数为第一导体与第二导体之间的电阻值;
5、获取清洗腔内的温度对应的第三参数,基于第一参数、第二参数与第三参数确定当前清洁指数,清洁指数用于衡量清洗腔内,用于清洁待清洗餐具的液体介质的污染程度;
6、若清洁指数大于预设阈值,则生成警报指令,警报指令用于指示更换清洗腔内的液体介质。
7、结合第一方面,在一些实施方式中,获取清洗腔内的温度对应的第三参数,基于第一参数、第二参数与第三参数确定当前清洁指数,清洁指数用于衡量清洗腔内,用于清洁待清洗餐具的液体介质的污染程度,包括:
8、获取多个不同的训练第一参数、多个不同的训练第二参数以及多个训练样本,训练样本为单位体积的液体介质,且每一个训练样本具有对应的训练第三参数,其中,每一个训练样本集清洁指数不同,每一个训练样本的对应一个训练第一参数与一个训练第二参数;
9、构建神经网络训练模型,将训练第一参数、训练第二参数与训练第三参数作为清洁指数的不同维度特征向量导入神经网络训练模型,并进行迭代计算,当计算过程满足预设条件时,将神经网络作为目标神经网络模型并输出,目标神经网络模型用于根据第一参数、第二参数以及第三参数,预测单位体积的液体介质的清洁指数;
10、将第一参数、第二参数与第三参数导入目标神经网络模型,得到清洁指数。
11、结合第一方面,在一些实施方式中,构建神经网络训练模型,将训练第一参数、训练第二参数与训练第三参数作为清洁指数的不同维度特征向量导入神经网络训练模型,并进行迭代计算,当计算过程满足预设条件时,将神经网络作为目标神经网络模型并输出,目标神经网络模型用于根据第一参数、第二参数以及第三参数,预测单位体积的液体介质的预测清洁指数,包括:
12、将训练第一参数、训练第二参数与训练第三参数作为清洁指数的不同维度特征向量导入神经网络训练模型,并进行迭代计算,得到预测清洁指数;
13、将预测清洁指数与训练样本的清洁指数相比对,确定误差值;
14、当误差值小于预设误差值时,停止迭代计算并输出目标神经网络模型。
15、结合第一方面,在一些实施方式中,信号生成端包括第一信号生成端、第二信号生成端与第三信号生成端,第一信号生成端、第二信号生成端与第三信号生成端所生成的红外光信号波束方向两两垂直,基于红外传感器获取第一参数,第一参数为信号生成端生成的红外光信号经过清洗腔并被信号接收端接收后,红外光信号的衰减率,包括:
16、基于第一信号生成端获取第一维度参数,基于第二信号生成端获取第二维度参数,基于第三信号生成端获取第三维度参数;
17、基于第一维度参数、第二维度参数与第三维度参数确定第一参数。
18、结合第一方面,在一些实施方式中,信号接收端包括第一信号接收端、第二信号接收端与第三信号接收端,基于第一维度参数、第二维度参数与第三维度参数确定第一参数,包括:
19、获取第一信号生成端至第一信号接收端的距离;
20、获取第二信号生成端至第二信号接收端的距离;
21、获取第三信号生成端至第三信号接收端的距离;
22、基于距离、距离以及距离确定第一参数,其中,第一参数e满足:
23、;
24、其中,为第一维度参数的值;为第二维度参数的值;为第三维度参数的值。
25、结合第一方面,在一些实施方式中,基于第一信号生成端获取第一维度参数,基于第二信号生成端获取第二维度参数,基于第三信号生成端获取第三维度参数,包括:
26、获取第一信号生成端生成的信号初始强度以及第一信号接收端接收信号强度;
27、基于信号初始强度与接收信号强度确定第一维度参数的值,第一维度参数的值满足:
28、;
29、其中,k为常数。
30、结合第一方面,在一些实施方式中,将训练第一参数、训练第二参数与训练第三参数作为清洁指数的不同维度特征向量导入神经网络训练模型,并进行迭代计算,得到预测清洁指数之前,包括:
31、对训练第一参数、训练第二参数与训练第三参数进行归一化处理,以使训练第一参数、训练第二参数与训练第三参数的值大于0且小于1。
32、本发明实施例的第二方面提出了一种洗碗机的工作状态自动控制装置,适用于一种超声波洗碗机,超声波洗碗机具有用于容纳待清洗餐具的清洗腔以及红外传感器,红外传感器包括信号生成端与信号接收端,其中,待清洗餐具容纳于清洗腔内时,信号生成端与信号接收端之间的连线不与任意待清洗餐具之间发生干涉,超声波洗碗机还包括间隔设置于清洗腔的第一导体与第二导体,装置被配置为:
33、基于红外传感器获取第一参数,第一参数为信号生成端生成的红外光信号经过清洗腔并被信号接收端接收后,红外光信号的衰减率;
34、基于第一导体与第二导体确定获取第二参数,第二参数为第一导体与第二导体之间的电阻值;
35、获取清洗腔内的温度对应的第三参数,基于第一参数、第二参数与第三参数确定当前清洁指数,清洁指数用于衡量清洗腔内,用于清洁待清洗餐具的液体介质的污染程度;
36、若清洁指数大于预设阈值,则生成警报指令,警报指令用于指示更换清洗腔内的液体介质。
37、可选地,装置被配置为:
38、获取多个不同的训练第一参数、多个不同的训练第二参数以及多个训练样本,训练样本为单位体积的液体介质,且每一个训练样本具有对应的训练第三参数,其中,每一个训练样本集清洁指数不同,每一个训练样本的对应一个训练第一参数与一个训练第二参数;
39、构建神经网络训练模型,将训练第一参数、训练第二参数与训练第三参数作为清洁指数的不同维度特征向量导入神经网络训练模型,并进行迭代计算,当计算过程满足预设条件时,将神经网络作为目标神经网络模型并输出,目标神经网络模型用于根据第一参数、第二参数以及第三参数,预测单位体积的液体介质的清洁指数;
40、将第一参数、第二参数与第三参数导入目标神经网络模型,得到清洁指数。
41、可选地,装置被配置为:
42、将训练第一参数、训练第二参数与训练第三参数作为清洁指数的不同维度特征向量导入神经网络训练模型,并进行迭代计算,得到预测清洁指数;
43、将预测清洁指数与训练样本的清洁指数相比对,确定误差值;
44、当误差值小于预设误差值时,停止迭代计算并输出目标神经网络模型。
45、可选地,装置被配置为:
46、基于第一信号生成端获取第一维度参数,基于第二信号生成端获取第二维度参数,基于第三信号生成端获取第三维度参数;
47、基于第一维度参数、第二维度参数与第三维度参数确定第一参数。
48、可选地,装置被配置为:
49、获取第一信号生成端至第一信号接收端的距离;
50、获取第二信号生成端至第二信号接收端的距离;
51、获取第三信号生成端至第三信号接收端的距离;
52、基于距离、距离以及距离确定第一参数,其中,第一参数e满足:
53、;
54、其中,为第一维度参数的值;为第二维度参数的值;为第一参数(z)的值。
55、可选地,装置被配置为:
56、获取第一信号生成端生成的信号初始强度以及第一信号接收端接收信号强度;
57、基于信号初始强度与接收信号强度确定第一维度参数的值,第一维度参数的值满足:
58、;
59、其中,k为常数。
60、可选地,装置被配置为:
61、对训练第一参数、训练第二参数与训练第三参数进行归一化处理,以使训练第一参数、训练第二参数与训练第三参数的值大于0且小于1。
62、本发明实施例第三方面提出一种电子设备,电子设备包括:
63、至少一个处理器;以及,与至少一个处理器通信连接的存储器;其中,
64、存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行本发明实施例第一方面提出方法。
65、本发明实施例第四方面提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例第一方面提出方法。
66、综上,上述方法与装置具有如下技术效果:
67、本技术实施例提出的一种洗碗机的工作状态自动控制方法,首先基于红外传感器获取第一参数,第一参数为信号生成端生成的红外光信号经过清洗腔并被信号接收端接收后,红外光信号的衰减率,然后,基于第一导体与第二导体确定获取第二参数,第二参数为第一导体与第二导体之间的电阻值,然后,获取清洗腔内的温度对应的第三参数,基于第一参数、第二参数与第三参数确定当前清洁指数,清洁指数用于衡量清洗腔内,用于清洁待清洗餐具的液体介质的污染程度,最后,若清洁指数大于预设阈值,则生成警报指令,警报指令用于指示更换清洗腔内的液体介质。本技术实施例提出的一种洗碗机的工作状态自动控制方法,通过红外光信号在清洗腔内,液体介质中的衰减程度,结合液体介质的电阻程度以及当前温度,对液体介质受到污染的程度进行一定程度的检测,在液体介质不能够使用时及时停止,提高了清洗效果。
- 还没有人留言评论。精彩留言会获得点赞!