用于控制建筑设备的工作单元的装置的制作方法
1.本发明涉及一种用于控制建筑设备的工作单元的装置,并且更具体地说,涉及一种用于控制建筑设备的工作单元的装置,该装置允许当诊断出建筑设备的故障时,彻底控制工作单元的操作。
背景技术:
2.根据常规技术,当诊断出用于控制正在操作的建筑设备的工作单元的装置的故障时,所有工作单元的液压控制停止,并且因此设备停止。
3.当液压控制因故障而完全停止时,任何设备的操作都是不可能的。
4.具体地,当设备由于工作单元处于上升状态中时导致的故障停止时,应降低工作单元以进行安全维修。
5.但是,控制是不可能的,因为液压控制完全停止。
6.在这种情况下,工作单元可以通过强制施加到液压控制装置的电力来降低,但是,工作单元可能由于自由下落时与地面碰撞而损坏,并且可能发生事故。
7.因此,需要一种当诊断出用于控制工作单元的装置的故障时根据用户的需要或修理的需要缓慢控制设备的功能。
8.(专利文献01)日本专利申请特开no.h07
‑
109097(1995年4月25日公布)
技术实现要素:
9.技术问题
10.本发明旨在提供一种用于控制建筑设备的工作单元的装置,即使当工作单元(诸如,动臂等)由于上升状态中的建筑设备的故障而停止时,该装置也允许工作单元缓慢降低。
11.问题解决方案
12.因此,提供了一种用于控制建筑设备的工作单元的装置,所述装置包括:液压控制装置,所述液压控制装置被配置成液压控制工作单元并由操作杆操作;多个子电子控制单元(ecu),所述多个子电子控制单元与所述液压控制装置电连接;主ecu,所述主ecu被配置成接收关于所述液压控制装置和所述多个子ecu的状态的信息;继电器,所述继电器被配置成通过从所述主ecu生成的信号而对所述多个子ecu施加或切断电力;以及紧急模式开关,所述紧急模式开关被配置成开启/关断紧急模式,其中,当开启所述紧急模式开关时,根据主ecu的故障诊断信号而被切断电力的继电器通过所述操作杆的移动而对所述多个子ecu施加或切断电力。
13.主ecu可以根据由子ecu测量的液压控制装置的状态信息测量值来确定该液压控制装置是否出现故障。
14.紧急模式开关可以通过主ecu而连接到继电器。
15.主ecu可以根据紧急模式开关的开启信号而控制继电器的重复开启/关断。
16.继电器的开启/关断可以用基于如下方程式1计算出的控制速度来控制液压控制装置:
17.[方程式1]
[0018]
v=t
on
/(t
on
+t
off
)
×
100
[0019]
(v表示控制速度,t
on
表示在包含t
on
+t
off
的一个循环内施加电流i
on
的时间,并且t
off
表示继电器关断的时间)。
[0020]
控制速度可以被控制为小于或等于预定值(v
p
)。
[0021]
预定值(v
p
)可以是60%。
[0022]
当在操作杆的中性位置处的操作位移大于或等于预定范围(d
p
)时,紧急模式开关可以执行继电器的开启/关断。
[0023]
操作杆的操作位移的预定范围(d
p
)可以是10%。
[0024]
发明的有利效果
[0025]
因此,当诊断出建筑设备的故障时,工作单元的操作被彻底控制,以使得工作单元缓慢降低,并且因此可以防止事故。
[0026]
应理解的是,本发明的效果不限于上述效果,并且包含能够从本发明的详细描述或权利要求书中所述的本发明的配置推导出的所有效果。
附图说明
[0027]
通过参照附图详细描述本发明的示例性实施例,本发明的上述和其它目的、特征和优点对于本领域的普通技术人员将变得更加明显,其中:
[0028]
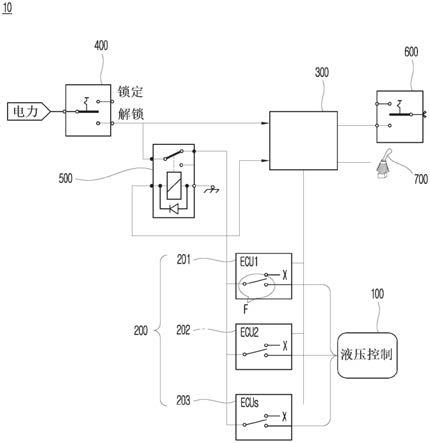
图1示意性地图示了根据本发明的实施例的用于控制建筑设备的工作单元的装置;
[0029]
图2是图示根据本发明的实施例的用于控制建筑设备的工作单元的装置的速度控制的曲线图;以及
[0030]
图3是图示将根据杆的操作位移而施加的电力的示意图。
具体实施方式
[0031]
下文中,将参照附图来描述实施例。但是,本发明的实施例可以按若干不同形式实施,并且不限于本文所述的实施例。此外,将在附图中省略与描述无关的部分以清楚地解释本发明的实施例,并且在整个说明书中,相似部分由相似附图标记表示。
[0032]
在整个说明书中,当一个元件被称为“连接”到另一元件时,该元件可以“直接连接”到另一元件,或者该元件可以通过介入元件而“间接连接”到另一元件。此外,除非另有描述,当一个部分“包括”一个元件时,该部分可以包括该元件,并且另一元件可以被进一步包括在其中。
[0033]
图1示意性地图示了根据本发明的实施例的用于控制建筑设备的工作单元的装置。
[0034]
如图1所示,根据本发明的实施例的用于控制建筑设备的工作单元的装置可以包括液压控制装置100、子电子控制单元(ecu)200、主ecu 300、安全杆开关400和继电器500。
[0035]
在该实施例中,工作单元可以是指未示出的动臂、斗杆、铲斗、回转机构、驱动单元
等,并且液压控制装置100可以是指用于控制工作单元的动臂的向上和向下移动的动臂缸、用于控制斗杆的向上和向下移动的斗杆缸、用于液压控制铲斗的铲斗缸或者用于控制回转机构的旋转的回转阀。
[0036]
虽然图1图示了一个液压控制装置100,但是可以应用多个液压控制装置100。
[0037]
子ecu 200可以包括多个ecu 201、202和203,并且可以与液压控制装置100电连接以控制液压控制装置100中的每一个液压控制装置。
[0038]
子ecu 200中的每一个子ecu电连接到液压控制装置100中的每一个液压控制装置,以控制液压控制装置100中的每一个液压控制装置的通道的打开或关闭。
[0039]
此外,子ecu 200实时测量关于液压控制装置100中的每一个液压控制装置的状态的信息,并基于测量到的状态信息来确定液压控制装置100中是否有任何一个液压控制装置发生故障。
[0040]
主ecu 300可以被配置成控制对继电器500施加或切断电力。
[0041]
在这种情况下,主ecu 300接收由子ecu 200检测到的液压控制装置100中的一个液压控制装置的状态信息测量值,并且当主ecu 300从液压控制装置100接收到故障信号时,可以切断到继电器500的电力。
[0042]
安全杆开关400由用户手动操作,但是当安全杆开关400处于解锁状态中时,电力被供应到所有液压控制装置100,使得执行液压控制,并且当安全杆开关400被切换到锁定状态时,执行阻断所有液压控制装置100的液压控制的功能。
[0043]
在这种情况下,当液压控制装置100中的任何一个液压控制装置的故障被子ecu 200诊断出时,紧急模式开关600可以被配置成即使当安全杆开关400处于解锁状态中时也重复地开启/关断继电器500。
[0044]
紧急模式开关600可以被配置成对继电器500强制施加电力,并且在这种情况下,继电器500被操作杆700重复地控制为开启/关断,并且液压控制装置100可以按照基于如下方程式1计算出的控制速度来控制。
[0045]
[方程式1]
[0046]
v=t
on
/(t
on
+t
off
)
×
100
[0047]
在此方程式中,v表示控制速度,t
on
表示在包含t
on
和t
off
的一个循环内施加电流i
on
的时间,并且t
off
表示继电器500关断的时间。
[0048]
控制速度v不表示精确的物理速度。换句话说,控制速度v表示当建筑设备处于正常状态中时控制速度的百分比(%)。
[0049]
同时,图2是图示建筑设备的液压回路的速度控制的曲线图。参照图1和图2,i
on
可以表示通常当建筑设备处于正常状态中时施加到继电器500的电流值,并且i
off
可以表示施加到继电器500的电流被切断的状态中的电流值。
[0050]
此外,t
on
等于t2减t1,t
off
等于t3减t2,并且t
on
和t
off
之和被定义为一个循环。
[0051]
通常,作为一个循环的t
on
+t
off
在一般情况下可以大致上是300ms,但是根据t
on
和t
off
的各种组合可以是各种值。
[0052]
同时,当紧急模式开关600开启时,无论设备是否发生故障,设备都可以强制性地且缓慢地操作。
[0053]
也就是说,当主ecu 300允许如图2所示重复开启
‑
关断波形时,电力对液压控制装
置100重复地施加和切断,并且设备的所有阀以间歇方式规则地移动,并且因此工作单元缓慢移动。
[0054]
如图1所示,t
on
和t
off
与操作杆700的操作位移成比例地受到控制,并且因此诸如动臂、斗杆、铲斗、回转机构、驱动单元等的工作单元的速度可以受到控制。
[0055]
控制速度v是基于方程式1而确定的。
[0056]
控制速度v可以被设定成小于或等于预定值v
p
,并且优选地,预定值v
p
可以被设定为60%。
[0057]
当控制速度v的最大值被设定为小于或等于60%时,即使当操作杆700被用户的不熟练操作而控制到最大位移时,控制速度v也被控制为小于或等于60%。
[0058]
此外,参照图3,当操作杆700的操作位移在中性位置处为零时,电力被切断,使得设备不操作,并且当操作杆700的操作位移在零到100%的范围内时,当以预定范围d
p
中的或更大的操作位移拉动操作杆700时,开始施加电力。
[0059]
在这种情况下,可以优选的是,操作杆700的开始施加电力的操作位移的预定范围dp被设定为10%。
[0060]
此外,t
on
根据操作杆700的操作位移而增大,并且随着操作位移增大,用于控制工作单元的时间增加,并且因此速度增大。
[0061]
因此,由于即使当操作杆700被拉动到最大极限100%时,设备也应缓慢移动,因此t
on
对于整个控制时间的比率不应大于60%。
[0062]
在这种情况下,根据操作杆700的操作位移的t
on
与总控制时间的比率的上限值可以根据设计值(诸如,建筑设备的重量等)而变化。
[0063]
用于控制建筑设备的工作单元的装置被配置成当诊断出建筑设备的故障时,即使当工作单元(诸如,动臂等)停止在上升状态中时,也彻底地控制工作单元缓慢降低,从而防止由工作单元的自由下落引起的损坏和事故。
[0064]
以上描述仅是示例性的,并且本领域的技术人员应理解的是,本发明可以在不改变技术范围和基本特征的情况下以其它具体形式执行。因此,上述实施例在所有方面都应被视为仅仅是示例,而不是出于限制的目的。例如,被描述为单一类型的每一部件可以按分散式方式实现,并且类似地,被描述为分散式的部件可以按联接方式实现。
[0065]
本发明的范围不由具体实施方式限定,而是由权利要求书限定,并且涵盖从权利要求书的含义、范围和等同物导出的所有修改或更改。
[0066]
附图标记列表
[0067]
10:工作单元控制装置
[0068]
100:液压控制装置
[0069]
200:子ecu
[0070]
300:主ecu
[0071]
400:安全杆开关
[0072]
500:继电器
[0073]
600:紧急模式开关
[0074]
700:操作杆
[0075]
t
on
:施加电流的时间
[0076]
t
off
:切断电流的时间
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1