一种地铁排水沟自动避障清污装置的制作方法
1.本发明涉及铁路扣件处理技术领域,具体而言,涉及一种地铁排水沟自动避障清污装置。
背景技术:
2.由于地铁隧道及车站开挖方式不同,其接缝处存在不同程度的渗漏,渗漏后参合泥浆流入地铁两侧排水沟造成排水沟堵塞,如不及时清理将给地铁车辆运行带来威胁。目前国内大多地铁采用第三轨受电,且第三轨安装于排水沟上方,清污空间狭小,且排水沟上方有部分电缆、油管等设备管线横穿,给清污工作带来很大障碍。现有的清污方式基本采用人工清污方式,其效率低下,周期长,人工成本高,且劳动条件较为恶劣,截止目前还没有一款能替代人工清污的智能专用设备。
3.例如公布号为cn109225987a中国发明专利申请,其公开了一种复合绝缘子智能清污装置,包括承载驱动装置、升降装置和清扫装置,升降装置安装在承载驱动装置上,清扫装置转动安装在升降装置的顶部,所述的清扫装置包括弧形主框架、以及设置在弧形主框架的伸缩夹具、清污自洁机构、喷水喷气嘴、高清摄像头、红外发射器和红外接收器。该发明实现了复合绝缘子外表面的带电自动高效清污功能以及复合绝缘子清污效果的自动对比分析功能,能够有效提高复合绝缘子外表面清污作业的安全性和效率,从而减少设备停电时间,提高设备的能量可用率,进而降低现场作业安全和作业质量管控的工作量,提高人机功效,从而创造出更多的经济效益。但该清污装置只用于高压电绝缘子的清污并不适用于地铁排水沟的清污。
技术实现要素:
4.为了解决现有技术存在的上述技术缺陷,本发明的目的在于提供一种地铁排水沟自动避障清污装置,通过旋转吸口总成、吸管伸缩机构总成、位置调整机构、自动避障系统相互配合,在清污的同时自动避让地铁第三轨支架及电缆,相对于人工清污方式,此发明装置结构简单、运行安全可靠、吸污效率高、位置调整方便,能适应不同规格的地铁隧道,减少人工操作,为地铁安全运行提供有力保障。
5.为了实现上述设计目的,本发明采用的方案如下:本发明提供一种地铁排水沟自动避障清污装置,该避障清污装置通过吸污小车车架安装在吸污小车的下端;该装置的主体和吸污小车车架上设有自动避障模块总成;吸污小车的车体上设有信号处理系统,通过自动避障模块总成的信号反馈至自动避障的信号处理系统处理相关信息后,控制自动避障清污装置4的动作。
6.优选的是, 所述该避障清污装置包括旋转吸口总成、吸管伸缩机构总成、伸缩式软管和位置调整机构总成。
7.在上述任一方案中优选的是,旋转吸口总成与吸管伸缩机构总成连接;伸缩式软管穿过吸管伸缩机构总成的内部,一端与旋转吸口总成连接,另一端与吸管伸缩机构总成
连接;位置调整机构总成安装于吸管伸缩机构总成上端,通过位置调整机构总成的动作调整,可调整旋转吸口总成吸污位置。
8.在上述任一方案中优选的是,所述旋转吸口总成包括软管吸口、旋转吸口、传动箱体和连接座。
9.在上述任一方案中优选的是,所述旋转吸口穿过传动箱体与软管吸口连接,传动箱体外安装的第一马达带动旋转吸口旋转。
10.在上述任一方案中优选的是,所述第一马达的端部设有第一编码器,安装于第一马达对立位的第一编码器控制旋转吸口的旋转角度。
11.在上述任一方案中优选的是,所述连接座连接在传动箱体的端部;连接座与吸管伸缩机构总成第一导向轴端部固定连接;伸缩式软管与连接盘固定连接。
12.在上述任一方案中优选的是,所述吸管伸缩机构总成包括第一导向轴、连接盘、伸缩箱体和驱动箱体。
13.在上述任一方案中优选的是,所述导向轴穿过伸缩箱体,一端与传动箱体的连接座固定,另一端在传动箱体内部导向滑动。
14.在上述任一方案中优选的是,所述连接盘的一端连接伸缩软管,另一端与传动箱体上的连接盘连接。
15.在上述任一方案中优选的是,所述驱动箱体上安装有第二马达和第二编码器。第一导向轴的伸缩动作由安装于伸缩箱体上的驱动箱体通过驱动箱体上安装的第二马达带动做伸缩运动,其伸缩量通过驱动箱体上安装的第二编码器控制其伸缩行程。
16.在上述任一方案中优选的是,所述伸缩箱体上设有旋转轴和固定座,旋转轴和固定座与位置调整机构总成连接,通过位置调整机构总成调整吸口吸污位置。
17.在上述任一方案中优选的是,所述位置调整机构总成包括第二导向轴、斜向驱动缸体、横向驱动缸体和调整架,调整架穿过第二导向轴,第二导向轴的两端与吸污小车车架固定。位置调整机构总成的工作原理是通过调整横向驱动缸体和斜向启动缸体伸缩,间接调整吸口吸污位置。
18.在上述任一方案中优选的是,所述横向驱动缸体的一端与吸污小车车架固定,另一端与调整架连接。
19.在上述任一方案中优选的是,所述斜向驱动缸体的一端与调整架连接,另一端与伸缩箱体上的固定座连接。
20.在上述任一方案中优选的是,所述调整架上设有旋转座,旋转座穿过伸缩箱体上的旋转轴绕其旋转。
21.在上述任一方案中优选的是,该避障清污装置中设有两套避障模块,分别为第一避障模块和第二避障模块。
22.在上述任一方案中优选的是,所述第一避障模块通过连接板安装于旋转吸口的外圆位置,检测竖直方向障碍物位置及尺寸大小。
23.在上述任一方案中优选的是,所述第一避障模块包括第一旋转支架和第一驱动缸体;第二避障模块包括第二旋转支架、第二驱动缸体和第三旋转支架。
24.在上述任一方案中优选的是,所述第二避障模块安装于第一旋转支架的端头,第一旋转支架与第二旋转支架通过第一驱动缸体的伸缩带动第二避障模块水平方向90度旋
转在上述任一方案中优选的是,所述第二旋转支架与第三旋转支架通过第二驱动缸体竖直方向90度旋转,第三旋转支架固定在吸污小车车架上。
25.通过第一驱动缸体和第二驱动缸体的伸缩,控制第二避障模块的伸出与收回,通过第二避障模块检测其水平方向障碍物位置及尺寸大小。第一避障模块和第二避障模块检测到障碍物后,将相关数据传回至自动避障信号处理系统处理,发出指令控制吸口旋转及吸管的伸缩。
附图说明
26.图1为按照本发明的地铁排水沟自动避障清污装置的总体布局图。
27.图2为按照本发明的地铁排水沟自动避障清污装置的一优选实施例的结构示意图。
28.图3为按照本发明的地铁排水沟自动避障清污装置的图2所示优选实施例中旋转吸口总成的结构示意图。
29.图4为按照本发明的地铁排水沟自动避障清污装置的图2所示实施例中吸管伸缩机构总成的结构示意图。
30.图5为按照本发明的地铁排水沟自动避障清污装置的图2所示实施例中位置调整机构总成的结构示意图。
31.图6为按照本发明的地铁排水沟自动避障清污装置的图2所示实施例中避障模块的结构示意图。
具体实施方式
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的实施例。
33.如图1所示,按照本发明的地铁排水沟自动避障清污装置的总体布局图。本发明的地铁排水沟自动避障清污装置,该避障清污装置通过吸污小车车架3安装在吸污小车1的下端;该装置的主体和吸污小车车架3上设有自动避障模块总成5;吸污小车1的车体上设有信号处理系统2,通过自动避障模块总成5的信号反馈至自动避障的信号处理系统2处理相关信息后,控制自动避障清污装置4的动作。
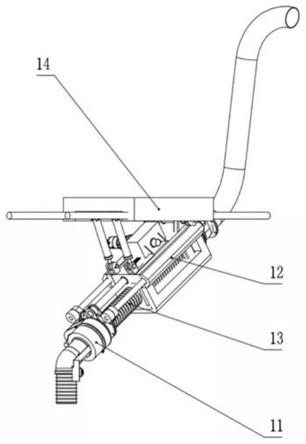
34.如图2所示,按照本发明的地铁排水沟自动避障清污装置的一优选实施例的结构示意图。
35.本发明的避障清污装置包括旋转吸口总成11、吸管伸缩机构总成12、伸缩式软管13和位置调整机构总成14。
36.本发明的工作原理是:吸污小车1抵达工作位置后,调整水平驱动缸体和斜向驱动缸体,将旋转吸口总成11的吸口位置调整到位,吸污小车1前进开始吸污,避障模块总成5的避障模块检测到障碍物位置及尺寸后将信号反馈至信号处理系统,信号处理系统发出信号控制吸口旋转,吸管缩回避让障碍物,避开第三轨及相关障碍物后,吸管伸出,吸口旋转至
竖直方向继续吸污。根据避障模块检测到不同障碍物的位置及尺寸,旋转吸口只做旋转运动或与吸管伸缩机构配合联动避让障碍物。
37.在本实施例中,旋转吸口总成11与吸管伸缩机构总成12连接;伸缩式软管13穿过吸管伸缩机构总成12的内部,一端与旋转吸口总成11连接,另一端与吸管伸缩机构总成12连接;位置调整机构总成14安装于吸管伸缩机构总成12上端,通过位置调整机构总成14的动作调整,可调整旋转吸口总成11吸污位置。
38.如图3所示,按照本发明的地铁排水沟自动避障清污装置的图2所示优选实施例中旋转吸口总成的结构示意图。
39.在本实施例中,所述旋转吸口总成11包括软管吸口21、旋转吸口22、传动箱体23和连接座27。
40.在本实施例中,所述旋转吸口22穿过传动箱体23与软管吸口21连接,传动箱体23外安装的第一马达25带动旋转吸口22旋转。
41.在本实施例中,所述第一马达25的端部设有第一编码器24,安装于第一马达25对立位的第一编码器24控制旋转吸口22的旋转角度。
42.在本实施例中,所述连接座27连接在传动箱体23的端部;连接座27与吸管伸缩机构总成12的第一导向轴31端部固定连接;伸缩式软管13与连接盘26固定连接。
43.如图4所示,按照本发明的地铁排水沟自动避障清污装置的图2所示实施例中吸管伸缩机构总成的结构示意图。
44.在本实施例中,所述吸管伸缩机构总成12包括第一导向轴31、连接盘32、伸缩箱体33和驱动箱体37。
45.在本实施例中,所述导向轴31穿过伸缩箱体33,一端与传动箱体23的连接座27固定,另一端在传动箱体23内部导向滑动。
46.在本实施例中,所述连接盘32的一端连接伸缩软管13,另一端与传动箱体23上的连接盘26连接。
47.在本实施例中,所述驱动箱体37上安装有第二马达36和第二编码器35。第一导向轴31的伸缩动作由安装于伸缩箱体33上的驱动箱体37通过驱动箱体37上安装的第二马达36带动做伸缩运动,其伸缩量通过驱动箱体37上安装的第二编码器35控制其伸缩行程。
48.在本实施例中,所述伸缩箱体33上设有旋转轴38和固定座34,旋转轴38和固定座34与位置调整机构总成14连接,通过位置调整机构总成14调整吸口吸污位置。
49.如图5所示,按照本发明的地铁排水沟自动避障清污装置的图2所示实施例中位置调整机构总成的结构示意图。
50.在本实施例中,所述位置调整机构总成14包括第二导向轴41、斜向驱动缸体42、横向驱动缸体43和调整架45,调整架45穿过第二导向轴41,第二导向轴41的两端与吸污小车车架3固定。位置调整机构总成14的工作原理是通过调整横向驱动缸体43和斜向启动缸体42伸缩,间接调整吸口吸污位置。
51.在本实施例中,所述横向驱动缸体43的一端与吸污小车车架3固定,另一端与调整架45连接。
52.在本实施例中,所述斜向驱动缸体42的一端与调整架45连接,另一端与伸缩箱体33上的固定座34连接。
53.在本实施例中,所述调整架45上设有旋转座44,旋转座44穿过伸缩箱体33上的旋转轴38绕其旋转。
54.如图6所示,按照本发明的地铁排水沟自动避障清污装置的图2所示实施例中避障模块的结构示意图。
55.本发明的避障清污装置中设有两套避障模块,分别为第一避障模块52和第二避障模块53。避障模块分别安装于旋转吸口22外圆的前进方向侧及第三轨下端,检测水平及竖直方向障碍物位置及相关尺寸,控制清污装置旋转及伸缩实现自动避让。
56.在本实施例中,所述第一避障模块52通过连接板51安装于旋转吸口22的外圆位置,检测竖直方向障碍物位置及尺寸大小。
57.在本实施例中,所述第一避障模块52包括第一旋转支架54和第一驱动缸体55;第二避障模块53包括第二旋转支架56、第二驱动缸体57和第三旋转支架58。
58.在本实施例中,所述第二避障模块53安装于第一旋转支架54的端头,第一旋转支架54与第二旋转支架56通过第一驱动缸体55的伸缩带动第二避障模块53水平方向90度旋转。
59.在本实施例中,所述第二旋转支架56与第三旋转支架58通过第二驱动缸体57竖直方向90度旋转,第三旋转支架58固定在吸污小车车架3上。
60.通过第一驱动缸体55和第二驱动缸体57的伸缩,控制第二避障模块53的伸出与收回,通过第二避障模块53检测其水平方向障碍物位置及尺寸大小。第一避障模块52和第二避障模块53检测到障碍物后,将相关数据传回至自动避障信号处理系统2处理,发出指令控制吸口旋转及吸管的伸缩。
61.本发明所提供的地铁排水沟自动避障清污装置,通过旋转吸口总成、吸管伸缩机构总成、位置调整机构、自动避障系统相互配合,在清污的同时自动避让地铁第三轨支架及电缆,相对于人工清污方式,此发明装置结构简单,运行安全可靠,吸污效率高,位置调整方便,能适应不同规格的地铁隧道,减少人工操作,为地铁安全运行提供有力保障。
62.本领域技术人员不难理解,本发明的地铁排水沟自动避障清污装置包括本说明书中各部分的任意组合。限于篇幅且为了使说明书简明,在此没有将这些组合一一详细介绍,但看过本说明书后,由本说明书构成的各部分的任意组合构成的本发明的范围已经不言自明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1