环保疏浚固化一体化系统
1.本发明涉及疏浚装备的技术领域,具体涉及一种环保疏浚固化一体化系统。
背景技术:
2.目前,由于各种原因泥沙会进入空间有限的湖库等区域内,导致常见的疏浚方式如绞吸式挖泥船、耙吸式挖泥船等此类结构复杂且外形尺寸过于庞大的设备,无法在该空间区域有限的环境内作业,所以需要一种适应该空间区域的绞吸设备进行疏浚挖掘。同时,对于环保的重视程度不断提高,由于疏浚泥的倾倒也严重影响了资源的利用并对环境造成了不可弥补的破坏。为了减少疏浚泥倾倒的最好办法就是将疏浚泥进行再利用,因此,需要研发一种适合深水空间受限区域的环保疏浚固化一体化系统。
技术实现要素:
3.本发明的目的在于克服上述背景技术的不足,提供一种环保疏浚固化一体化系统,该系统能实现对路面区域的疏浚泥进行固化、运输一体化处理,而且处理时间短、运输方便。
4.为实现上述目的,本发明所设计的一种环保疏浚固化一体化系统,包括疏浚车、存泥箱以及固化处理装置;
5.所述疏浚车包括疏浚车本体、铰刀机构以及用于驱动铰刀机构上下移动的驱动臂机构;
6.所述疏浚车本体包括驾驶室、疏浚车厢、转动圆盘以及履带行走装置,所述疏浚车厢内设置有第一泥泵;
7.所述铰刀机构与第一泥泵之间通过第一软管连接,所述第一泥泵与存泥箱之间通过第二软管连接,所述存泥箱与固化处理装置之间通过输泥管道连接;
8.所述固化处理装置包括供电模块、电极模块以及排水管,所述供电模块的正极与电极模块连接,所述供电模块的负极与排水管连接。
9.进一步地,所述驾驶室和疏浚车厢的下方设置有履带行走装置,所述驾驶室和疏浚车厢与履带行走装置之间通过转动圆盘转动连接。
10.进一步地,铰刀机构包括铰刀和空心支臂,所述空心支臂的一端与铰刀连接,所述空心支臂的另一端与第一软管连接。
11.进一步地,所述铰刀采用齿式铰刀,它包括底盘,所述底盘上设置有若干个呈弧形状的刀臂,每个所述刀臂上设置有若干个刀齿,相邻两个所述刀臂之间留有间隙。
12.进一步地,所述驱动臂机构包括机械臂、第一驱动缸、第二驱动缸以及第三驱动缸,所述机械臂的一端与疏浚车本体铰接,所述机械臂的另一端与铰刀机构铰接;
13.所述第一驱动缸设置在机械臂的上方中部,所述第一驱动缸的一端与机械臂的上方中部铰接,所述第一驱动缸的另一端与铰刀机构铰接;
14.所述第二驱动缸、第三驱动缸设置在机械臂的两侧,所述第二驱动缸和第三驱动
缸的一端分别与疏浚车本体铰接,所述第二驱动缸和第三驱动缸的另一端分别与机械臂两侧的中部铰接。
15.进一步地,所述输泥管道内设置有第二泥泵。
16.进一步地,所述第二泥泵采用叶轮式离心泵,它包括蜗壳,所述蜗壳内设置有叶轮。
17.进一步地,所述电极模块包括若干个成方形布置的电极固定框,所述电极固定框上设置有若干个成方形布置的铁电极;所述铁电极与固化处理装置的壳体紧贴布置。
18.再进一步地,所述排水管设置在电极固定框的中部,若干个所述铁电极呈方形布置在排水管的外周。
19.更进一步地,所述固化处理装置的下方设置有支撑座,所述支撑座的中部设置有用于与排水管接通的接口;所述排水管采用毛细管或者多孔介质材料。
20.与现有技术相比,本发明具有如下优点:
21.其一,本发明的环保疏浚固化一体化系统将疏浚作业的绞吸装置安装在疏浚车上,与传统上的绞吸式挖泥船通过定位桩来进行左右摆动作业,通过锚缆配合铰刀支臂将铰刀放入水中进行上下摆动作业,同时传统上的挖掘机大小臂相对容易断裂,且没有将挖掘机的机械臂改装为绞吸式挖掘的先例,而本发明的疏浚作业车结合了绞吸式挖泥船的绞吸装置和路面挖掘的车体在路面区域的适应性。
22.其二,本发明的环保疏浚固化一体化系统通过挖掘机车体的原本转动圆盘的进行左右摆动,取代了绞吸式挖泥船需要定位桩来进行左右摆动的优点;通过将挖掘机的机械臂改装,空心支臂配合第一驱动缸、第二驱动缸及第三驱动缸进行联动,取代了原本绞吸式挖泥船锚缆配合铰刀支臂将铰刀放入水中进行上下摆动作业的优点;通过绞吸式挖掘取代铲斗式挖掘,机械大小臂相较于传统挖掘机更不容易发生断裂。
23.其三,本发明的环保疏浚固化一体化系统铰刀头采用齿式铰刀,从而能够增加切削的效率;泥泵采用叶轮式离心泵,从而可以提高输送效率。
24.其四,本发明的环保疏浚固化一体化系统设计的固化处理装置通过支撑座将装置撑起,使排水口向下,可以达到很好的排水效果,极大的提高疏浚固化效率,且泥浆处理成固态以后方便运输。与传统泥浆固化处理大多是采用增加固化剂和絮凝剂相比,本发明的固化处理装置通过采用电渗的原理,可最大限度的减少对环境造成的污染。
附图说明
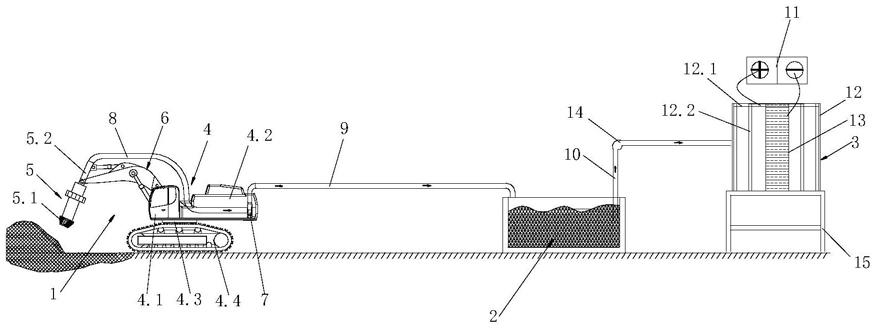
25.图1为一种环保疏浚固化一体化系统的示意图;
26.图2为图1中疏浚车的放大结构示意图;
27.图3为图1中铰刀机构的放大结构示意图;
28.图4为图1中固化处理装置的放大结构示意图;
29.图5为图4中电极模块的工作原理示意图;
30.图6为图1中第二泥泵内部结构示意图;
31.图中:疏浚车1、存泥箱2、固化处理装置3、疏浚车本体4、驾驶室4.1、疏浚车厢4.2、转动圆盘4.3、履带行走装置4.4、铰刀机构5、铰刀5.1、底盘5.11、刀臂5.12、刀齿5.13、空心支臂5.2、驱动臂机构6、机械臂6.1、第一驱动缸6.2、第二驱动缸6.3、第三驱动缸6.4、第一
泥泵7、第一软管8、第二软管9、输泥管道10、供电模块11、电极模块12、电极固定框12.1、铁电极12.2、排水管13、第二泥泵14、蜗壳14.1、叶轮14.2、支撑座15、接口15.1。
具体实施方式
32.下面结合实施案例详细说明本发明的实施情况,但它们并不构成对本发明的限定,仅作举例而已。同时通过说明本发明的优点将变得更加清楚和容易理解。
33.如图1所示的一种环保疏浚固化一体化系统,包括疏浚车1、存泥箱2以及固化处理装置3;疏浚车1包括疏浚车本体4、铰刀机构5以及用于驱动铰刀机构5上下移动的驱动臂机构6;疏浚车本体4包括驾驶室4.1、疏浚车厢4.2、转动圆盘4.3以及履带行走装置4.4,疏浚车厢4.2内设置有第一泥泵7;铰刀机构5与第一泥泵7之间通过第一软管8连接,第一泥泵7与存泥箱2之间通过第二软管9连接,存泥箱2与固化处理装置3之间通过输泥管道10连接;固化处理装置3包括供电模块11、电极模块12以及排水管13,供电模块11的正极与电极模块12连接,供电模块11的负极与排水管13连接,供电模块可采用直流可调电源,排水管采用毛细管或者多孔介质材料。
34.如图2所示,驾驶室4.1和疏浚车厢4.2的下方设置有履带行走装置4.4,驾驶室4.1和疏浚车厢4.2与履带行走装置4.4之间通过转动圆盘4.3转动连接,这样可以通过转动圆盘4.3转动带动铰刀机构5进行左右摆动。驱动臂机构6包括机械臂6.1、第一驱动缸6.2、第二驱动缸6.3以及第三驱动缸6.4,机械臂6.1的一端与疏浚车本体4铰接,机械臂6.1的另一端与铰刀机构5铰接;第一驱动缸6.2设置在机械臂6.1的上方中部,第一驱动缸6.2的一端与机械臂6.1的上方中部铰接,第一驱动缸6.2的另一端与铰刀机构5铰接;第二驱动缸6.3、第三驱动缸6.4设置在机械臂6.1的两侧,第二驱动缸6.3和第三驱动缸6.4的一端分别与疏浚车本体4铰接,第二驱动缸6.3和第三驱动缸6.4的另一端分别与机械臂6.1两侧的中部铰接。这样,可以通过第一驱动缸6.2、第二驱动缸6.3以及第三驱动缸6.4多点铰接联动带动铰刀机构5进行上下摆动。
35.如图3所示,铰刀机构5包括铰刀5.1和空心支臂5.2,空心支臂5.2的一端与铰刀5.1连接,空心支臂5.2的另一端与第一软管8连接。铰刀5.1采用齿式铰刀,它包括底盘5.11,底盘5.11上设置有若干个呈弧形状的刀臂5.12,每个刀臂5.12上设置有若干个刀齿5.13,相邻两个刀臂5.12之间留有间隙。这样,可以提高切削的效率
36.如图4和图5所示,电极模块12包括若干个成方形布置的电极固定框12.1,电极固定框12.1上设置有若干个成方形布置的铁电极12.2;铁电极12.2与固化处理装置3的壳体紧贴布置。排水管13设置在电极固定框12.1的中部,若干个铁电极12.2呈方形布置在排水管13的外周。,其特征在于:固化处理装置3的下方设置有支撑座15,支撑座15的中部设置有用于与排水管13接通的接口15.1。本发明的固化处理装置3采用电渗的原理,使连接正极的铁电级12.2与连接负级的排水管13之间形成电势,使装置内的水由紧贴着壳体方状排列的铁电极12.2流向毛细管或多孔介质材料的排水管13后,通过水的自重,由排水管自然下坠,达到排水效果,泥水分离后,废水由排水管排出,若排出有毒废水可以进一步特殊处理,脱水泥土干燥后更加方便批量运输。
37.如图6所示,输泥管道10内设置有第二泥泵14。第二泥泵14采用叶轮式离心泵,它包括蜗壳14.1,蜗壳14.1内设置有叶轮14.2。叶轮14.2在蜗壳14.1内部,当蜗壳内充满淤泥
土时,叶轮在驱动机的带动下运转,使淤泥土在蜗壳内旋转,产生离心力,在离心力作用下,淤泥土由中心向四周甩出,最终由出口流出,可提高输送效率。
38.以上,仅为本发明的具体实施方式,应当指出,任何熟悉本领域的技术人员在本发明所揭示的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内,其余未详细说明的为现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1