轻量折叠臂架式岸上绞吸机的制作方法
1.本实用新型涉及清淤技术领域,尤其涉及一种轻量折叠臂架式岸上绞吸机。
背景技术:
2.在进行江河湖泊清淤疏浚时,主要采用绞吸船清淤和围堰干法清淤两种方式。
3.采用绞吸船进行清淤时,因泥浆的存储和预处理都在船上进行,使得绞吸船尺寸大、吃水深,主要适用于大江、大河及大湖清淤,如遇河道较窄、水深较浅、河道上有桥梁、高低落水时,绞吸船将受到极大的限制。
4.采用围堰干法清淤时,需在全断面或局部断面设置围堰,并将围堰内水抽干后,方可采用机械或人工方式进行清淤。围堰干法清淤较适合水深较浅、水流较慢的小型河道,如遇水深较深或水流较急时,围堰施工极为困难,围堰、抽水施工工程量大,施工周期长,不利于项目管理目标的顺利实现。
5.当河道较窄、河道上有桥梁、高低落水时,不适用绞吸船清淤。此时,若水流又较深或较急,采用围堰清淤施工困难且工程量巨大,经济性差且施工周期长。若应用岸上绞吸技术,则可合理应对该种情况。现今,行业内对岸上绞吸技术的应用主要有吸污车和挖机式绞吸泵。
6.吸污车主要利用泥浆泵对沉泥进行抽吸并车载运输,多用于化粪池清理。尝试应用于河道清淤过程中发现,泥浆泵管于水下抽泥时,进水多于进泥,吸泥效果差;遇树枝、塑料袋、石块等杂物时,容易堵泵。存储泥浆的泥浆罐容量小,往返运输耗费时间多,吸泥工效低。吸污车采用轮胎行走,在河边复杂地形情况下,无法靠边,无法作业。吸污车对于清淤疏浚工程的适用性不佳。
7.挖机式绞吸泵安装于挖机臂上,可伸入水下进行绞吸作业。但挖机臂长较短,作业半径小;河道两岸多为软弱斜坡,挖机不便于靠边作业;挖机臂因主要用于开挖作业,多有尺寸大、笨重的特点。
技术实现要素:
8.本实用新型的主要目的在于提供一种真空绞吸原理、折叠臂架原理、履带行走原理以及管道运输原理于一体的轻量折叠臂架式岸上绞吸机。
9.为实现上述目的,本实用新型提供一种轻量折叠臂架式岸上绞吸机,包括:行走装置、回转底座系统、绞吸臂架系统、真空吸泥系统、供电系统以及驾驶室,其中,
10.所述行走装置位于回转底座系统的下方,绞吸臂架系统、真空吸泥系统、供电系统和驾驶室均固定于回转底座系统上,供电系统与真空吸泥系统电连接,真空吸泥系统的吸泥管道依附固定于绞吸臂架系统上,行走装置为履带式行走装置,绞吸臂架系统包括多个可折叠的臂节,真空吸泥系统设置有真空吸泥泵。
11.优选地,所述回转底座系统包括回转底座以及固定于回转底座上以驱动其转动的回转电机,行走装置位于回转底座下方,绞吸臂架系统、真空吸泥系统、供电系统和驾驶室
均固定于回转底座上。
12.优选地,所述回转电机通过齿轮传动使回转底座连同回转底座上固定的机构整体进行回转。
13.优选地,所述绞吸臂架系统包括至少两根臂节、连接相邻两臂节的销轴、支撑相邻两臂节的液压顶撑、以及安装于最前方臂节头部的绞吸头和绞吸电机,其中,液压顶撑的两端分别与相邻的两臂节固定连接,绞吸电机与绞吸头电连接以驱动其转动搅拌底泥。
14.优选地,所述臂节设置有3~5根,单根臂节长度为6~9m,臂节端部采用法兰盘连接绞吸头,臂节端部通过紧固件固定绞吸电机。
15.优选地,所述真空吸泥系统包括固定于回转底座系统上方的真空吸泥泵、固定于臂节上的吸泥管道、连接相邻两臂节的旋转管段、以及位于真空吸泥泵后方的排泥管道,吸泥管道由真空吸泥泵引出并沿臂节布置。
16.优选地,所述吸泥管道通过u型抱箍固定于臂节上。
17.优选地,所述的轻量折叠臂架式岸上绞吸机还包括控制系统,该控制系统包括显示屏、与显示屏电连接的控制主芯片、以及与控制主芯片电连接的回转控制系统、液压控制系统、绞吸控制系统和吸泥控制系统,回转控制系统与回转底座系统电连接,液压控制系统与液压顶撑电连接,绞吸控制系统与绞吸电机电连接,吸泥控制系统与真空吸泥系统电连接。
18.优选地,所述回转控制系统包括与回转电机电连接的回转电机控制继电器、以及安装于回转底座上的角度传感器,液压控制系统包括与液压顶撑电连接的第一电磁继电器、以及安装于液压顶撑上的位置传感器,绞吸控制系统包括与绞吸电机电连接的绞吸电机控制继电器、以及安装于绞吸头上的应力传感器、转速传感器以及陀螺仪+加速度传感器,吸泥控制系统包括与真空吸泥泵电连接的第二电磁继电器以及安装于吸泥管道中的流量传感器。
19.优选地,所述供电系统包括柴油发电机组以及与柴油发电机组连接的交流转直流系统,交流转直流系统与真空吸泥系统电连接。
20.本实用新型提出的轻量折叠臂架式岸上绞吸机,具有以下有益效果:
21.1、利用真空绞吸原理,吸泥泵采用真空吸泥泵,吸泥效果好;在臂架端部设置绞吸头,可高强度搅动底泥,增强吸泥效果;
22.2、采用折叠臂架,臂节可组合3~5个,臂架伸展后长度可达45m,大幅度增加作业半径;同时,回转系统的设置也使得臂架能够多角度作业;
23.3、履带行走装置适用于野外复杂地形的行走;
24.4、将真空吸泥泵固定于回转底座上,仅将吸泥管道和绞吸装置固定于臂架上,可大幅降低臂架载重,使臂架轻量化;
25.5、通过排泥管道进行泥浆远距离运输,不再在设备主体上设置存泥货仓,可有效增加运泥效率并使得设备整体轻量化;
26.6、通过控制系统的设置,可有效监控真空吸泥泵流量、绞吸头转速,从而实现对吸泥参数的控制;可有效监控回转位置及臂架折叠伸展情况,从而实现对设备的安全操作;可及时监测绞吸头的应力状况,避免绞吸头遇障碍物而损坏电机以及臂架水下遇障碍物时强行回转导致设备侧翻的情况发生。
附图说明
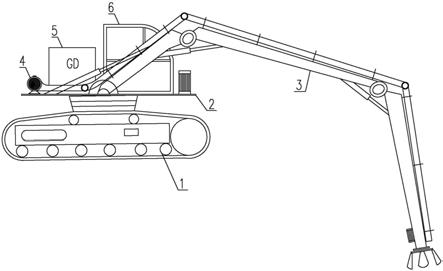
27.图1为本实用新型轻量折叠臂架式岸上绞吸机在伸臂状态时的左视结构示意图;
28.图2为本实用新型轻量折叠臂架式岸上绞吸机在叠臂状态时的左视结构示意图;
29.图3为本实用新型轻量折叠臂架式岸上绞吸机在伸臂状态时的右视结构示意图;
30.图4为本实用新型轻量折叠臂架式岸上绞吸机的俯视结构示意图;
31.图5为本实用新型轻量折叠臂架式岸上绞吸机中绞吸头的结构示意图;
32.图6为本实用新型轻量折叠臂架式岸上绞吸机中旋转管段的节点结构示意图;
33.图7为本实用新型轻量折叠臂架式岸上绞吸机中供电系统的结构示意图;
34.图8为本实用新型轻量折叠臂架式岸上绞吸机中控制系统的电路原理示意图。
35.图中,1、行走装置,2、回转底座系统,2
‑
1、回转底座,2
‑
2、回转电机,3、绞吸臂架系统,3
‑
1、臂节,3
‑
2、销轴,3
‑
3、液压顶撑,3
‑
4、绞吸头,3
‑
5、绞吸电机,4、真空吸泥系统,4
‑
1、真空吸泥泵,4
‑
2、吸泥管道,4
‑
3、旋转管段,4
‑
4、u型抱箍,4
‑
5、排泥管道,5、供电系统,5
‑
1、柴油发电机组,5
‑
2、交流转直流系统,6、驾驶室,7、控制系统,7
‑
1、显示屏,7
‑
2、控制主芯片,7
‑
3、回转电机控制继电器,7
‑
4、角度传感器,7
‑
5、第一电磁继电器,7
‑
6、位置传感器,7
‑
7、绞吸电机控制继电器,7
‑
8、应力传感器,7
‑
9、转速传感器,7
‑
10、陀螺仪+加速度传感器,7
‑
11、第二电磁继电器,7
‑
12、流量传感器。
36.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
37.应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
38.需要说明的是,在本实用新型的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
39.参照图1至图8,本优选实施例中,一种轻量折叠臂架式岸上绞吸机,包括:行走装置1、回转底座系统2、绞吸臂架系统3、真空吸泥系统4、供电系统5以及驾驶室6,其中,
40.行走装置1位于回转底座系统2的下方,绞吸臂架系统3、真空吸泥系统4、供电系统5和驾驶室6均固定于回转底座系统2上,供电系统5与真空吸泥系统4电连接,真空吸泥系统4的吸泥管道4
‑
2依附固定于绞吸臂架系统3上,行走装置1为履带式行走装置,绞吸臂架系统3包括多个可折叠的臂节3
‑
1,真空吸泥系统4设置有真空吸泥泵4
‑
1。
41.具体地,参照图2和图3,回转底座系统2包括回转底座2
‑
1以及固定于回转底座2
‑
1上以驱动其转动的回转电机2
‑
2,行走装置1位于回转底座2
‑
1下方,绞吸臂架系统3、真空吸泥系统4、供电系统5和驾驶室6均固定于回转底座2
‑
1上。回转电机2
‑
2通过齿轮传动使回转底座2
‑
1连同回转底座2
‑
1上固定的机构整体进行回转。回转电机2
‑
2使用螺栓固定在回转底座2
‑
1上。回转底座2
‑
1采用合金钢材制作。
42.具体地,参照图3、图4和图5,绞吸臂架系统3包括至少两根臂节3
‑
1、连接相邻两臂
提供的交流电转化为直流电,以向控制系统7供电。
50.本轻量折叠臂架式岸上绞吸机其工作过程如下。
51.利用真空绞吸原理,吸泥泵采用真空吸泥泵4
‑
1,吸泥效果好;在臂架端部设置绞吸头3
‑
4,可高强度搅动底泥,增强吸泥效果。将真空吸泥泵4
‑
1固定于回转底座2
‑
1上,仅将吸泥管道4
‑
2和绞吸装置固定于臂架上,可大幅降低臂架载重,使臂架轻量化。
52.采用折叠臂架,相邻两臂节3
‑
1之间通过销轴3
‑
2连接;相邻两臂节3
‑
1之间连接液压顶撑3
‑
3,以控制臂节3
‑
1折叠和伸展;整个臂架可连接臂节3
‑
1为3~5个,根据需要选择臂节3
‑
1的个数。单个臂节3
‑
1长度6~9m,整个臂架长度可达到45m,大幅度增加作业半径。吸泥管道4
‑
2的节与节之间由旋转管段4
‑
3连接,在与旋转管段4
‑
34
‑
3接口处,可与旋转管段4
‑
3进行相对旋转,以实现在臂架折叠伸展时,吸泥管道4
‑
2可相应进行折叠和伸展。
53.回转电机2
‑
2利用齿轮传动使回转底座2
‑
1连同回转底座2
‑
1上固定的机构整体进行回转,使得本轻量折叠臂架式岸上绞吸机可以多角度回转进行作业,同时多角度回转也便于行走装置1在复杂地形上行走。
54.行走装置1为履带行走装置,便于行走于岸边复杂地形。
55.通过排泥管道5进行泥浆远距离运输,不再在设备主体上设置存泥货仓,可有效增加运泥效率并使得设备整体轻量化。
56.显示屏7
‑
1主要用于反馈各个控制系统7的工作状态和异常情况,以便操作人员作出指令。控制主芯片7
‑
2主要用于处理各个控制系统7所收集的信息,并将操作人员指令传达至各个控制系统7。
57.控制系统7可实现以下功能:
58.1、监测回转角度,获取回转位置,控制回转作业。监测液压顶撑3
‑
3伸缩情况,获取臂架伸展折叠情况,控制臂架伸展折叠作业,以实现对设备的安全操作。
59.2、监测绞吸头3
‑
4转速和加速度,以控制绞动速度,监控真空吸泥泵4
‑
1的流量,实现对吸泥参数的控制。
60.3、监测绞吸头3
‑
4的应力状况,如绞吸头3
‑
4遇障碍物时,应力急剧增大,控制系统7进行报警,操作人员收到报警后及时作出指令,避免绞吸头3
‑
4遇障碍物而损坏电机以及臂架水下遇障碍物时强行回转导致设备侧翻的情况发生。
61.4、各个控制系统7收集的数据可在控制主芯片7
‑
2处进行自动分析、处理、反馈,各个控制系统7的工作状态、异常情况可在显示屏7
‑
1上显示。
62.本实施例提出的轻量折叠臂架式岸上绞吸机,具有以下有益效果:
63.1、利用真空绞吸原理,吸泥泵采用真空吸泥泵4
‑
1,吸泥效果好;在臂架端部设置绞吸头3
‑
4,可高强度搅动底泥,增强吸泥效果;
64.2、采用折叠臂架,臂节3
‑
1可组合3~5个,臂架伸展后长度可达45m,大幅度增加作业半径;同时,回转系统的设置也使得臂架能够多角度作业;
65.3、履带行走装置1适用于野外复杂地形的行走;
66.4、将真空吸泥泵4
‑
1固定于回转底座2
‑
1上,仅将吸泥管道4
‑
2和绞吸装置固定于臂架上,可大幅降低臂架载重,使臂架轻量化;
67.5、通过排泥管道5进行泥浆远距离运输,不再在设备主体上设置存泥货仓,可有效增加运泥效率并使得设备整体轻量化;
68.6、通过控制系统7的设置,可有效监控真空吸泥泵4
‑
1流量、绞吸头3
‑
4转速,从而实现对吸泥参数的控制;可有效监控回转位置及臂架折叠伸展情况,从而实现对设备的安全操作;可及时监测绞吸头3
‑
4的应力状况,避免绞吸头3
‑
4遇障碍物而损坏电机以及臂架水下遇障碍物时强行回转导致设备侧翻的情况发生。
69.以上仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1