作业机械、系统以及作业机械的控制方法与流程
1.本公开涉及作业机械、系统以及作业机械的控制方法。
背景技术:
2.铲斗内的载荷在知晓作业机械的工作量上是重要的。运算铲斗内的载荷值的技术例如在日本特开2010
‑
89633号公报(专利文献1)、国际公开第2018/087834号(专利文献2)中被公开。
3.在专利文献1中,根据作业机械的姿势、作用于动臂缸的压力并通过运算来取得货物的当前载荷值。通过累计该当前载荷值来运算累计载荷值。当该累计载荷值达到目标载荷值时,该状态被通知给操作员。
4.在专利文献2中,基于动臂缸的伸缩的加速度来校正铲斗内的载荷值。由此,能够从载荷值中去除由基于动臂、斗杆、铲斗等的动作而得到的工作装置的惯性引起的误差,且能够提高载荷计测时的计测精度。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2010
‑
89633号公报
8.专利文献2:国际公开第2018/087834号
技术实现要素:
9.发明要解决的课题
10.在用液压挖掘机等作业机械挖掘砂土并将其装入自卸车的作业中,需要使装载量为自卸车的最大装载量以下。在自卸车进行多次挖掘、装入,并计测每次的装入土量而将合计出的装载量通知给操作员。为了计测每次的土量,需要工作装置的动臂、斗杆、铲斗的角度、以及动臂缸的液压。因此,安装传感器,并在挖掘土而将土放入铲斗中后,在动臂的抬起动作中计测铲斗内的土量。
11.由于上述抬起动作中的动臂缸压力与动臂的操作相应地变动(波动),因此难以精度良好地计测载荷。
12.本公开的目的在于提供能够提高载荷计测的精度的作业机械、系统以及作业机械的控制方法。
13.用于解决课题的方案
14.本公开的作业机械具备动臂、斗杆、铲斗、动臂缸、以及控制器。斗杆安装于动臂的前端。铲斗安装于斗杆的前端。动臂缸驱动动臂。控制器基于动臂缸的负荷来运算铲斗内的载荷计算值,并检测使动臂缸动作的操作指令值和动臂缸的伸缩速度中的至少一方的信息的每单位时间的变化量,并基于每单位时间的变化量来校正通过运算而获得的载荷计算值,从而决定载荷值。
15.发明效果
16.根据本公开,可以实现能够提高载荷计测的精度的作业机械、系统以及作业机械的控制方法。
附图说明
17.图1是概要地示出本公开的一实施方式的作业机械的结构的图。
18.图2是示出图1所示的作业机械的系统的概要结构的框图。
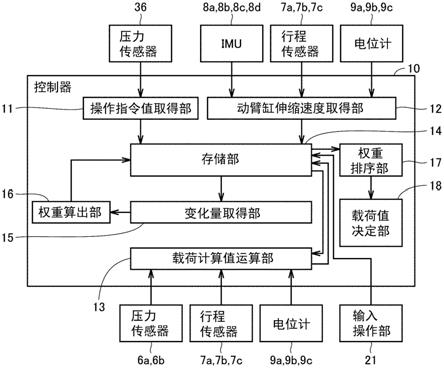
19.图3是示出图2所示的控制器内的功能块的图。
20.图4是示出本公开的一实施方式的作业机械的控制方法的流程图。
21.图5是示出动臂的ppc压力、动臂的ppc压力的变化量以及载荷计算值(calcupayload)的时间变化的图。
具体实施方式
22.以下,基于图对本公开的实施方式进行说明。
23.在说明书以及附图中,对相同的构成要素或对应的构成要素标注相同的附图标记,且不重复进行说明。另外,在附图中,为了便于说明,有时也省略或简化结构。
24.除了液压挖掘机以外,只要是具有动臂、斗杆以及铲斗的作业机械,则能够应用本公开。在以下的说明中,“上”、“下”、“前”、“后”、“左”、“右”是指以在驾驶室2a内的驾驶座2b就座的操作员为基准的方向。
25.<作业机械的结构>
26.图1是概要地示出本公开的一实施方式的作为作业机械的一例的液压挖掘机的结构的侧视图。如图1所示,本实施方式的液压挖掘机100主要具有行驶体1、回转体2以及工作装置3。通过行驶体1和回转体2构成作业机械主体。
27.行驶体1具有左右一对履带装置1a。该左右一对履带装置1a分别具有履带。通过驱动左右一对履带旋转,从而使液压挖掘机100自动行驶。
28.回转体2相对于行驶体1设置成回转自如。该回转体2主要具有驾驶室(cab)2a、驾驶座2b、发动机室2c、以及配重2d。驾驶室2a配置于回转体2的例如前方左侧(车辆前侧)。在驾驶室2a的内部空间配置有用于供操作员就座的驾驶座2b。
29.发动机室2c以及配重2d分别相对于驾驶室2a配置于回转体2的后方侧(车辆后侧)。发动机室2c收纳有发动机单元(发动机、排气处理结构体等)。发动机室2c的上方被发动机罩覆盖。配重2d配置于发动机室2c的后方。
30.工作装置3轴支承于回转体2的前方侧且驾驶室2a的例如右侧。工作装置3例如具有动臂3a、斗杆3b、铲斗3c、动臂缸4a、斗杆缸4b、铲斗缸4c等。动臂3a的基端部通过动臂脚销5a以能够旋转的方式与回转体2连结。另外,斗杆3b的基端部通过动臂前端销5b以能够旋转的方式与动臂3a的前端部连结。铲斗3c通过销5c以能够旋转的方式与斗杆3b的前端部连结。
31.动臂3a能够由动臂缸4a驱动。通过该驱动,动臂3a能够以动臂脚销5a为中心相对于回转体2沿上下方向转动。斗杆3b能够由斗杆缸4b驱动。通过该驱动,斗杆3b能够以动臂前端销5b为中心相对于动臂3a沿上下方向转动。铲斗3c能够由铲斗缸4c驱动。通过该驱动,铲斗3c能够以销5c为中心相对于斗杆3b沿上下方向转动。这样,工作装置3能够驱动。
32.工作装置3具有铲斗连杆3d。铲斗连杆3d具有第一连杆构件3da和第二连杆构件3db。第一连杆构件3da的前端与第二连杆构件3db的前端经由铲斗缸顶部销3dc以能够相对旋转的方式连结。铲斗缸顶部销3dc与铲斗缸4c的前端连结。因此,第一连杆构件3da以及第二连杆构件3db与铲斗缸4c销连结。
33.第一连杆构件3da的基端通过第一连杆销3dd以能够旋转的方式与斗杆3b连结。第二连杆构件3db的基端通过第二连杆销3de以能够旋转的方式与铲斗3c的根部分的托架连结。
34.在动臂缸4a的顶侧安装有压力传感器6a。压力传感器6a能够检测动臂缸4a的缸顶侧油室40a内的工作油的压力(顶侧压力)。在动臂缸4a的底侧安装有压力传感器6b。压力传感器6b能够检测动臂缸4a的缸底侧油室40b内的工作油的压力(底侧压力)。
35.在动臂缸4a、斗杆缸4b以及铲斗缸4c分别安装有行程传感器(检测部)7a、7b、7c。
36.能够根据动臂缸4a中的活塞杆4ab相对于缸4aa的位移量来算出动臂角θb。另外,能够根据斗杆缸4b中的活塞杆的位移量来算出斗杆角θa。另外,能够根据铲斗缸4c中的活塞杆的位移量来算出铲斗角θk。
37.另外,也可以在动臂脚销5a、动臂前端销5b以及销5c各自的周围安装有电位计9a、9b、9c。能够根据电位计9a的测定值来算出动臂角θb。另外,能够根据电位计9b的测定值来算出斗杆角θa。另外,能够根据电位计9c的测定值来算出铲斗角θk。
38.另外,在回转体2、动臂3a、斗杆3b以及第一连杆构件3da分别安装有imu(inertial measurement unit:惯性计测装置)8a、8b、8c、8d。imu8a计测回转体2的前后方向、左右方向以及上下方向上的加速度、以及回转体2的绕前后方向、左右方向以及上下方向的角速度。imu8b、8c、8d分别计测动臂3a、斗杆3b、铲斗3c的前后方向、左右方向以及上下方向上的加速度、以及动臂3a、斗杆3b、铲斗3c的绕前后方向、左右方向以及上下方向的角速度。
39.基于由安装于回转体2的imu8a测定出的加速度和由安装于动臂3a的imu8b测定出的加速度这两者的差量,能够取得动臂缸4a的伸缩的加速度(动臂缸4a的伸缩速度的变化量)。
40.需要说明的是,在本实施方式中,动臂角θb、斗杆角θa、铲斗角θk由电位计测定,但也可以由imu算出。
41.<作业机械的系统的概要结构>
42.接下来,使用图2对作业机械的系统的概要结构进行说明。
43.图2是示出图1所示的作业机械的系统的概要结构的框图。如图2所示,本实施方式的系统是用于决定载荷值的系统。本实施方式的系统包括图1所示的作为作业机械的一例的液压挖掘机100、以及图2所示的控制器10。控制器10既可以搭载于液压挖掘机100,也可以设置于远离液压挖掘机100的远程地。
44.操作装置25配置在驾驶室2a内。操作装置25由操作员操作。操作装置25接受驱动工作装置3的操作员操作。另外,操作装置25接受使回转体2回转的操作员操作。操作装置25输出与操作员操作相应的操作信号。在该例中,操作装置25例如是先导液压方式的操作装置,但也可以是电气方式的操作装置。
45.通过发动机31的驱动力来驱动液压泵33。从液压泵33排出的工作油向操作装置25供给。供给到操作装置25的工作油与操作员对操作装置25的操作对应地,经由方向控制阀
34向各种液压致动器40供给。
46.通过控制液压相对于液压致动器40的供给以及排出,从而控制工作装置3的动作、回转体2的回转、以及行驶体1的行驶动作。上述液压致动器40包括图1所示的动臂缸4a、斗杆缸4b、铲斗缸4c、未图示的回转马达等。
47.发动机31例如是柴油发动机。通过由控制器10控制燃料向发动机31的喷射量,从而控制发动机31的输出。
48.液压泵33与发动机31连结。通过将发动机31的旋转驱动力向液压泵33传递,从而驱动液压泵33。液压泵33例如是具有斜板并通过变更斜板的倾转角而使排出容量变化的可变容量型的液压泵。从液压泵33排出的工作油被减压阀减压至恒定的压力,并向方向控制阀34供给。
49.方向控制阀34例如是使杆状的滑柱(spool)移动来对工作油流动的方向进行切换的滑柱方式的阀。通过滑柱在轴向上移动,从而调整对液压致动器40的工作油的供给量。在方向控制阀34设置有检测滑柱的移动距离(滑柱行程)的滑柱行程传感器。
50.需要说明的是,在该例中,将为了使液压致动器40工作而向该液压致动器40供给的油称为工作油。另外,将为了使方向控制阀34工作而向该方向控制阀34供给的油称为先导油。另外,将先导油的压力称为ppc压力(先导液压)。
51.液压泵33也可以送出工作油和先导油双方。例如也可以是,从液压泵33送出的工作油的一部分被减压阀减压,该减压后的工作油用作先导油。另外,液压泵33也可以分开地具有送出工作油的液压泵(主液压泵)、以及送出先导油的液压泵(先导液压泵)。
52.操作装置25具有第一操作杆25r和第二操作杆25l。第一操作杆25r例如配置于驾驶座2b的右侧。第二操作杆25l例如配置于驾驶座2b的左侧。对第一操作杆25r以及第二操作杆25l而言,前后左右的动作与两轴的动作对应。
53.通过第一操作杆25r例如对动臂3a以及铲斗3c进行操作。第一操作杆25r的前后方向的操作例如对应于动臂3a的操作,且与前后方向的操作相应地执行动臂3a上升的动作以及下降的动作。第一操作杆25r的左右方向的操作例如对应于铲斗3c的操作,且与左右方向的操作相应地执行铲斗3c向上下方向的动作。
54.通过第二操作杆25l例如对斗杆3b以及回转体2进行操作。第二操作杆25l的前后方向的操作例如对应于斗杆3b的操作,且与前后方向的操作相应地执行斗杆3b向上下方向的动作。第二操作杆25l的左右方向的操作例如对应于回转体2的回转,且与左右方向的操作相应地执行回转体2的右旋转动作以及左旋转动作。
55.在该例中,将动臂3a上升的动作也称为抬起动作,将动臂3a下降的动作也称为降落动作。另外,将斗杆3b向上下方向的动作也分别称为卸料动作、挖掘动作。将铲斗3c向上下方向的动作也分别称为卸料动作、挖掘动作。
56.需要说明的是,也可以是,第一操作杆25r的左右方向的操作对应于动臂3a的操作,前后方向的操作对应于铲斗3c的操作。另外,也可以是,第二操作杆25l的前后方向对应于回转体2的操作,左右方向的操作对应于斗杆3b的操作。
57.将从液压泵33送出且被减压阀减压后的先导油向操作装置25供给。
58.操作装置25与方向控制阀34经由先导油路450连接。基于操作装置25的操作内容而调整ppc压力。在对操作装置25进行操作时,与操作装置25的操作内容对应的ppc压力经
由先导油路450向方向控制阀34供给。由此,方向控制阀34被调整,从而调整向动臂缸4a、斗杆缸4b以及铲斗缸4c供给的工作油的流动方向以及流量,并执行动臂3a、斗杆3b、铲斗3c向上下方向的动作。
59.在先导油路450配置有压力传感器36。压力传感器36检测ppc压力。压力传感器36的检测结果向控制器10输出。通过操作装置25的操作而被调整、且由压力传感器36检测的ppc压力相当于本实施方式的操作指令值。
60.虽在图2中简化地进行图示,但与第一操作杆25r以及第二操作杆25l向前后左右各方向的操作对应的多个先导油路450设置成将操作装置25与方向控制阀34连接。在多个先导油路450分别配置有压力传感器36。
61.在例如使动臂3a动作的情况下,在使动臂3a进行抬起动作时对ppc压力的增加进行检测的压力传感器36与在使动臂3a进行降落动作时对ppc压力的增加进行检测的压力传感器36不同。另外,例如,在使斗杆3b进行卸料动作时对ppc压力的增加进行检测的压力传感器36与在使斗杆3b进行挖掘动作时对ppc压力的增加进行检测的压力传感器36不同。另外,在例如使铲斗3c动作的情况下,在使铲斗3c进行卸料动作时对ppc压力的增加进行检测的压力传感器36与在使铲斗3c进行挖掘动作时对ppc压力的增加进行检测的压力传感器36不同。
62.ppc压力的增加量根据使操作杆25l、25r分别相对于中立位置倾倒的角度而不同。这样,根据由各压力传感器36获得的ppc压力的检测结果,能够判断操作装置25的操作内容。
63.另外,还向控制器10输入行程传感器7a~7c、imu8a~8d、电位计9a~9c以及压力传感器6a、6b的检测信号。
64.控制器10既可以通过有线方式与行程传感器7a~7c、imu8a~8d、电位计9a~9c以及压力传感器6a、6b、36分别电连接,另外也可以通过无线方式进行通信。控制器10例如是计算机、服务器、便携终端等,也可以是cpu(central processing unit)。
65.<控制器10内的功能块>
66.接下来,使用图3对控制器10内的功能块进行说明。
67.图3是示出图2所示的控制器内的功能块的图。如图3所示,控制器10具有操作指令值取得部11、动臂缸伸缩速度取得部12、载荷计算值运算部13、存储部14、变化量取得部15、权重算出部16、权重排序部17、以及载荷值决定部18。
68.向操作指令值取得部11输入由压力传感器36检测出的ppc压力的信号。操作指令值取得部11根据由压力传感器36检测出的ppc压力的信号,检测例如使动臂缸4a动作的操作指令值。由操作指令值取得部11取得的操作指令值向存储部14输出,并存储于存储部14。
69.向动臂缸伸缩速度取得部12输入由imu8a~8d分别检测出的加速度等的信号。动臂缸伸缩速度取得部12例如基于由安装于回转体2的imu8a检测出的加速度和由安装于动臂3a的imu8b检测出的加速度这两者的差量,来检测动臂缸4a的伸缩的加速度(动臂缸4a的伸缩速度的变化量)。
70.另外,向动臂缸伸缩速度取得部12输入由行程传感器7a~7c检测出的活塞杆的位移量或工作装置的角度(动臂角θb、斗杆角θa、铲斗角θk)的信号。动臂缸伸缩速度取得部12例如基于由行程传感器7a检测出的活塞杆的位移量或工作装置的角度(动臂角θb),来检测
动臂缸4a的伸缩速度。
71.另外,向动臂缸伸缩速度取得部12输入由电位计9a~9c检测出的工作装置的角度(动臂角θb、斗杆角θa、铲斗角θk)的信号。动臂缸伸缩速度取得部12例如基于由电位计9a检测出的工作装置的角度(动臂角θb),来检测动臂缸4a的伸缩速度。
72.由动臂缸伸缩速度取得部12检测出的动臂缸4a的伸缩速度(或其伸缩速度的变化量)向存储部14输出,并存储于存储部14。
73.向载荷计算值运算部13输入由压力传感器6a、6b检测出的动臂缸4a的顶侧压力以及底侧压力的信号。另外,向载荷计算值运算部13输入由行程传感器7a~7c检测出的活塞杆的位移量或工作装置的角度(动臂角θb、斗杆角θa、铲斗角θk)的信号。另外,向载荷计算值运算部13输入由电位计9a~9c检测出的工作装置的角度(动臂角θb、斗杆角θa、铲斗角θk)的信号。
74.载荷计算值运算部13根据所输入的上述信号运算载荷计算值。由载荷计算值运算部13运算出的载荷计算值向存储部14发送,并存储于存储部14。
75.变化量取得部15根据存储于存储部14的信息,取得使动臂缸4a动作的操作指令值和动臂缸4a的伸缩速度中的至少一方的信息的每单位时间的变化量。
76.变化量取得部15例如根据由操作指令值取得部11取得且存储于存储部14的ppc压力的信号,取得使动臂缸4a动作的操作指令值的每单位时间的变化量。
77.另外,变化量取得部15例如根据由操作指令值取得部11取得且存储于存储部14的动臂缸4a的伸缩速度的变化量,取得动臂缸4a的伸缩速度的每单位时间的变化量。
78.另外,变化量取得部15例如根据由操作指令值取得部11取得且存储于存储部14的动臂缸4a的伸缩速度,取得动臂缸4a的伸缩速度的每单位时间的变化量。
79.在上述中,由变化量取得部15取得的变化量向权重算出部16输出。权重算出部16基于从变化量取得部15输入来的变化量,来算出用于在加权平均中使用的权重(加权值)。由权重算出部16算出的权重向存储部14输出,并存储于存储部14。
80.权重排序部17将存储于存储部14的多个权重基于这些权重的大小进行排序。
81.载荷值决定部18基于存储于存储部14的载荷计算值和权重,通过加权平均来决定载荷值。载荷值决定部18在计算区间长的(例如3秒以上的)情况下,也可以仅使用由权重排序部17排序后的权重中的权重较大的数据(也就是不使用权重较小的数据),通过加权平均来决定载荷值。在本实施方式中,也可以仅使用由权重排序部17排序后的权重较大的n个数据,通过加权平均来决定载荷值。
82.<作业机械的控制方法>
83.接下来,使用图3以及图4对本实施方式的作业机械的控制方法进行说明。
84.图4是示出本公开的一实施方式的作业机械的控制方法的流程图。如图4所示,在本实施方式中,首先计算铲斗3c内的当前的载荷计算值(calcupayload)(步骤s1)。该载荷计算值(calcupayload)由静态平衡计算。具体而言,在算出由于工作装置3的自重而产生的力矩mx
we
之后,根据绕动臂脚销5a的各力矩的平衡来计算铲斗3c内的当前的载荷计算值。该载荷计算值(calcupayload)的计算由图3所示的载荷计算值运算部13进行。
85.首先,由工作装置3的自重而产生的力矩mx
we
通过以下的式(1)算出。
86.[式1]
[0087]
mx
we
[0088]
=m
boom
×
x
boom_c
+m
boomc
×
x
boomc_c
+m
boomcr
×
x
boomcr_c
+m
arm
×
x
arm_c
[0089]
+m
armc
×
x
armc_c
+m
armcr
×
x
armcr_c
+m
bucket
×
x
bucket_c
…
(1)
[0090]
在式(1)中,m
boom
是动臂3a的重量。m
boomc
是动臂缸4a的缸部分的重量。m
boomcr
是动臂缸4a的活塞杆部分的重量。m
arm
是斗杆3b的重量。m
armc
是斗杆缸4b的缸部分的重量。m
armcr
是斗杆缸4b的活塞杆部分的重量。m
bucket
是铲斗3c的重量。
[0091]
这些重量m
boom
、m
boomc
、m
boomcr
、m
arm
、m
armc
、m
armcr
以及m
bucket
分别如图3所示那样例如通过由输入操作部21进行对存储部14的输入操作而存储于存储部14。
[0092]
在式(1)中,x
boom_c
是从动臂脚销5a到动臂3a的重心的距离。x
boomc_c
是从动臂脚销5a到动臂缸4a的缸部分的重心的距离。x
boomcr_c
是从动臂脚销5a到动臂缸4a的活塞杆部分的重心的距离。x
arm_c
是从动臂脚销5a到斗杆3b的重心的距离。x
armc_c
是从动臂脚销5a到斗杆缸4b的缸部分的重心的距离。x
armcr_c
是从动臂脚销5a到斗杆缸4b的活塞杆部分的重心的距离。x
bucket_c
是从动臂脚销5a到铲斗3c的重心的距离。
[0093]
这些距离x
boom_c
、x
boomc_c
、x
boomcr_c
、x
arm_c
、x
armc_c
、x
armcr_c
以及x
bucket_c
分别可以根据行程传感器7a~7c、电位计9a~9c的检测结果等算出。
[0094]
该力矩mx
we
的计算由图3所示的载荷计算值运算部13进行。
[0095]
接下来,绕动臂脚销5a的力矩的平衡通过以下的式(2)表示。
[0096]
[式2]
[0097]
f
×
h=calcupayload
×
x
payloal_c
+mx
we
…
(2)
[0098]
在式(2)中,f是动臂缸4a的负荷(按压力),并根据动臂缸4a的顶侧压力和底侧压力而获得。因此,f根据由压力传感器6a检测出的压力(顶侧压力)和由压力传感器6b检测出的压力(底侧压力)而获得。
[0099]
在式(2)中,h是动臂脚销5a与动臂缸4a之间的最短距离(与动臂缸4a的延伸方向正交的方向的距离)。h可以根据行程传感器7a、电位计9a的检测值等而算出。
[0100]
在式(2)中,x
payload_c
是动臂脚销5a与铲斗3c内的货物的重心之间的距离。x
payload_c
可以根据行程传感器7a~7c、电位计9a~9c的检测值等而算出。
[0101]
根据式(2),载荷计算值(calcupayload)通过以下的式(3)表示。
[0102]
[式3]
[0103][0104]
如式(3)所示,铲斗3c内的载荷计算值(calcupayload)基于动臂缸4a的负荷f而算出。始终实施上述的载荷计算值(calcupayload)的计算。
[0105]
接下来,进行是否进行动臂3a的抬起动作的判定(步骤s2:图4)。例如,也可以当正在同时进行动臂3a的抬起动作和回转体2的旋转动作时,判定为正在执行动臂3a的抬起动作。是否正在执行动臂3a的抬起动作和回转体2的旋转动作的判定可以通过例如由压力传感器36检测ppc压力来进行。
[0106]
在判定为未实施动臂3a的抬起动作的情况下,继续进行载荷计算值(calcupayload)的计算。另一方面,在判定为正在实施动臂3a的抬起动作的情况下,计算每单位时间的动臂抬起ppc压力的变化量(步骤s3:图4)。
[0107]
在进行该变化量的计算时,根据对上述载荷计算值进行了计算的瞬间之前的第一时刻的动臂抬起ppc压力和第一时刻之前的第二时刻的动臂抬起ppc压力,计算每单位时间的动臂抬起ppc压力的变化量x。
[0108]
根据上述,检测使动臂缸4a动作的操作指令值(动臂抬起ppc压力)的每单位时间的变化量x。基于该变化量x的计算而进行的检测由图3所示的变化量取得部15进行。
[0109]
基于这样检测出的每单位时间的变化量x,校正通过上述运算而获得的载荷计算值(calcupayload),决定载荷值w
payload
(步骤s4:图4)。在该载荷计算值的校正中,首先基于上述变化量x来算出权重(加权值)w(步骤s4a)。
[0110]
权重w例如根据变化量x的倒数求出。由此,每单位时间的变化量x较大时的权重w变小,每单位时间的变化量x较小时的权重w变大。该权重w的算出由图3所示的权重算出部16进行。
[0111]
始终实施上述每单位时间的变化量x以及权重w的算出,每瞬间算出的权重w存储于图3所示的存储部14。
[0112]
接下来,进行存储于存储部14的权重w的排序(步骤s4b)。该权重w的排序按照权重w的大小顺序进行排序。该权重w的排序由图3所示的权重排序部17进行。
[0113]
接下来,通过使用上述获得的权重w对载荷计算值(calcupayload)进行加权平均,来决定载荷值w
payload
(步骤s4c:图4)。在决定该载荷值w
payload
时,使用以下的式(4)。
[0114]
[式4]
[0115][0116]
在式(4)中,calcupayload1、calcupayload2、calcupayload3、calcupayloadt分别是在时刻1、时刻2、时刻3、时刻t如上述那样取得的载荷计算值。另外,w1、w2、w3、w
t
分别是在时刻1、时刻2、时刻3、时刻t如上述那样取得的权重。
[0117]
如式(4)所示,减小每单位时间的变化量较大时的权重并增大每单位时间的变化量较小时的权重,而进行载荷计算值的加权平均。该载荷值w
payload
的决定由图3所示的载荷值决定部18进行。
[0118]
在本实施方式中,也可以是,不使用由权重排序部17排序后的多个权重中的权重较小的多个权重的数据(权重和与该权重对应的载荷计算值),而仅使用权重较大的上位30个权重的数据(权重和与该权重对应的载荷计算值),并根据式(4)所示的加权平均来决定载荷值。
[0119]
通过如以上那样基于每单位时间的变化量x来校正载荷计算值(calcupayload),从而决定载荷值w
payload
。
[0120]
对于决定出的载荷值w
payload
,进行用于排除作业机械每个个体所具有的误差的校正(步骤s5:图4)。该校正通过在铲斗3c内没有货物的状态(空载状态)下如上述那样决定载荷值w
payload
、并从在铲斗3c内有货物的状态下获得的载荷值w
payload
中减去空载状态下的载荷值w
payload
来进行。通过该校正,能够消除因作业机械的个体差异而产生的动摩擦、阻力等
的差异。
[0121]
之后,进行货物是否从铲斗3c内排出了的判定(步骤s6:图4)。货物从铲斗3c内的排出例如是为了装入自卸车而进行的。
[0122]
在判定为货物未从铲斗3c内排出的情况下,再次进行载荷计算值的计算(步骤s1:图4)。另一方面,在判定为货物从铲斗3c内排出了的情况下,确定校正后的载荷值,并将该确定出的校正后的载荷值与自卸车的装载量相加(步骤s7:图4)。
[0123]
校正后的载荷值以及自卸车的装载量例如显示于驾驶室2a内的显示装置等。由此,驾驶室2a内的操作员能够一边确认铲斗3c内的校正后的载荷值和自卸车的装载量,一边进行挖掘/装入作业。
[0124]
根据以上内容,决定铲斗3c内的载荷值,并将其与自卸车的装载量相加。
[0125]
在上述中对操作装置25为先导液压方式的情况进行了说明,但操作装置25也可以是电气方式。在操作装置25为电气方式的情况下,第一操作杆25r以及第二操作杆25l各自的操作量例如由电位计检测。电位计是获得与机械位置成比例的电(电压)输出的位移传感器。因此,作为操作指令值的每单位时间的变化量,由电位计获得的电(电压)输出的每单位时间的变化量也可以在用于算出进行加权平均的权重w。
[0126]
另外,在上述中对基于操作指令值的每单位时间的变化量x来算出权重而进行加权平均的情况进行了说明,但也可以基于动臂缸的伸缩速度的每单位时间的变化量来算出权重而进行加权平均。另外,也可以基于操作指令值的每单位时间的变化量x和动臂缸的伸缩速度的每单位时间的变化量双方来算出权重而进行加权平均。
[0127]
<作用效果>
[0128]
接下来,结合图5所示的本发明人的见解对本实施方式的作用效果进行说明。
[0129]
图5是示出动臂抬起ppc压力、动臂抬起ppc压力的变化量以及载荷计算值(calcupayload)的时间变化的图。如图5所示,本发明人发现在动臂3a的ppc压力(图中实线)增加的动臂3a的抬起动作时,动臂3a的ppc压力的变化量与动臂3a的操作相应地波动,载荷计算值(calcupayload)也伴随于此而波动。由此可知,在动臂3a的抬起操作时,难以精度良好地计测铲斗3c内的载荷。
[0130]
另外,本发明人还发现,若动臂3a的抬起速度快,则载荷计算值(calcupayload)的精度进一步变差。因此,需要仔细地进行动臂3a的抬起操作,但若仔细的进行动臂3a的抬起操作,则生产率恶化。
[0131]
因此,在本实施方式中,基于使动臂缸4a动作的操作指令值和动臂缸4a的伸缩速度中的至少一方的信息的每单位时间的变化量,通过校正载荷计算值(calcupayload)来决定载荷值w
payload
。由此,能够获得降低了在动臂3a的动作时载荷计算值(calcupayload)中产生的波动的载荷值w
payload
。因此,在动臂3a的操作时,能够精度良好地计测铲斗3c内的载荷。因此,操作员仅通过进行如往常那样的操作,就能够精度良好地计测铲斗3c内的载荷,并且也能够较高地维持生产率。
[0132]
另外,根据本实施方式,减小上述每单位时间的变化量x较大时的权重w,增大上述每单位时间的变化量x较小时的权重w,并进行载荷计算值(calcupayload)的加权平均,由此决定载荷值w
payload
。通过这样增大变化量x较小时的权重w,能够使计算结果稳定。
[0133]
另外,由于不是使用瞬间的计测值,而是将其平均来决定载荷值w
payload
,因此即使
由于突然操作等而导致动臂缸4a的顶侧压力以及底侧压力噪声性的紊乱,也不会对计测结果产生大的影响。
[0134]
另外,根据本实施方式,算出多个权重,不使用多个权重中的较小的权重的载荷计算值,而使用多个权重中的较大的权重的载荷计算值来进行加权平均,由此决定载荷值w
payload
。由此,即使在计算区间例如短至3秒的情况下,也能够计算稳定的载荷值w
payload
。
[0135]
另外,根据本实施方式,操作指令值以及动臂缸4a的伸缩速度分别是对动臂3a进行抬起的操作时的操作指令值以及动臂缸4a的伸缩速度。由此,能够获得降低了在动臂3a的抬起动作时载荷计算值(calcupayload)中产生的波动的载荷值w
payload
。
[0136]
本次公开的实施方式应当被认为在所有方面均为例示而不是限制性的。本发明的范围由技术方案示出而非上述的说明,意在包含与技术方案等同的意思以及范围内的所有变更。
[0137]
附图标记说明:
[0138]
1行驶体,1a履带装置,2回转体,2a驾驶室,2b驾驶座,2c发动机室,2d配重,3工作装置,3a动臂,3b斗杆,3c铲斗,3d铲斗连杆,3da第一连杆构件,3db第二连杆构件,3dc铲斗缸顶部销,3dd第一连杆销,3de第二连杆销,4a动臂缸,4aa缸,4ab活塞杆,4b斗杆缸,4c铲斗缸,5a动臂脚销,5b动臂前端销,5c销,6a、6b、36压力传感器,7a、7b、7c行程传感器,8a、8b、8c imu,9a、9b、9c电位计,10控制器,11操作指令值取得部,12动臂缸伸缩速度取得部,13载荷计算值运算部,14存储部,15变化量取得部,16权重算出部,17权重排序部,18载荷值决定部,21输入操作部,25操作装置,25l第二操作杆,25r第一操作杆,31发动机,33液压泵,34方向控制阀,40液压致动器,100液压挖掘机,450先导油路。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1