一种模块化地下管道清洗机器人的制作方法
1.本发明涉及地下管道清洗技术,具体涉及一种模块化地下管道清洗机器人。
背景技术:
2.城市排水管网是城市的“血管”,肩负着收集、输送城市污水和雨水的重任,是城市水体环境的重要组成部分。目前,排水管网传统清洗方法主要以人工为主,定期人工打捞窨井口垃圾,由于清洗不到位,导致了以下严重问题:1)地下管道内部淤堵严重,地下管道排水功能下降;2)地下管道老化和漏损频发,使用年限远低于设计年限;3)有些特殊情况下,通过潜水员进入地下管道内部清洗,效率低,安全事故频发。
3.采用高压水方式在地下管道内冲洗,冲洗的污水进入窨井口,然后通过吸污管在窨井口吸污。主要问题是:1)吸污与冲洗不在同一地点,且不是同时进行,导致冲洗的污水在流入窨井口的过程中,产生沉积;2)对于口径比较小的地下管道,高压水冲洗的效果还可以,但是随着地下管道口径增加,高压水在空气中行程过长而能量衰减,导致高压水流不能搅动地下管道内的沉积物,因此清洗不干净。
4.采用智能机器人进入地下管道进行清洗,效率高而且安全。但是由于地下管道内的淤积情况多种多样,有的淤积板结含水量少,有的充满泥水混合淤泥,垃圾成分也各不相同,有软的塑料袋、纺织物,也有硬的砖头、石块。这种情况下单一的清洗机器人难以满足所有的工作要求。
5.因此开发一种模块化地下管道清洗机器人,是有效解决城市管道清洗的最好方法。
技术实现要素:
6.为了解决上述现有技术中存在的问题,本申请提供一种模块化地下管道清洗机器人,应用模块化设计技术,解决了地下管道多工况的高效清洗问题。
7.为了实现上述技术效果,本发明的具体技术方案如下:
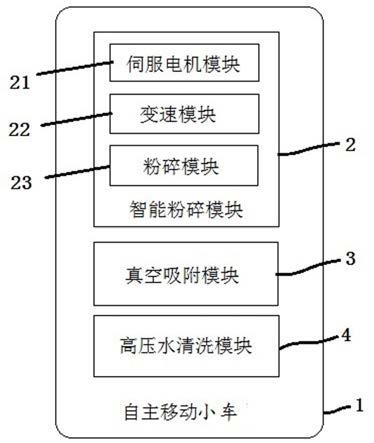
8.一种模块化地下管道清洗机器人,包括自主移动小车、真空吸附模块、高压水清洗模块、智能粉碎模块,该自主移动小车上集成有所述真空吸附模块、高压水清洗模块、智能粉碎模块;
9.所述高压水清洗模块与外界的高压水管连通,对自主移动小车前进时前部的地下管道进行冲洗;
10.所述智能粉碎模块包括伺服电机模块、变速模块、粉碎模块,粉碎模块用于粉碎地下管道内的沉积物,其中变速模块、粉碎模块均能够快速拆装在自主移动小车上;
11.所述真空吸附模块为安装在自主移动小车上的真空吸污输入口,该真空吸污输入口与外界的吸污管连通。
12.进一步地,所述自主移动小车包括车体,所述车体两侧安装有驱动轮,真空吸污输入口设置在车体前端面底部,变速模块底部设有与该真空吸污输入口对接的输送孔,该输
送孔与粉碎模块相通。
13.进一步地,所述粉碎模块包括一壳体,该壳体前端面设有粉碎机构,壳体内设有与所述输送孔相通的输送通道。
14.进一步地,所述伺服电机模块采用伺服电机,其安装在车体内部或其外部,所述变速模块的一端设有与伺服电机的动力输出端连接的联轴器端、另一端设有动力传动端,粉碎模块上设有与该动力传动端匹配的对接端,所述车体前端面、变速模块、粉碎模块上均设有用于螺栓连接的连接孔。
15.进一步地,所述变速模块采用第一变速模块或第二变速模块,其中第一变速模块为力矩相较大、速度相较慢的变速机构,第二变速模块为力矩相较小、速度相较快的变速机构。
16.进一步地,所述粉碎机构采用甩刀式结构、双螺旋结构或盾构式结构。
17.进一步地,所述车体上还固定设置有拉杆。
18.进一步地,所述高压水清洗模块采用安装在粉碎模块两侧的高压水喷头,该高压水喷头与车体上固定的输水管连通,该输水管与外界的高压水管连通。
19.进一步地,还包括地面的真空吸污系统,该真空吸污系统通过吸污管、通讯动力线缆、高压水管与本机器人连接。
20.依据上述技术方案,本发明的机器人工作前,通过管道检测机器人对地下管道工况的观察,选择合适的变速模块(即第一变速模块或第二变速模块)和粉碎模块,安装在自主移动小车上。自主移动小车通过自主移动,携带智能粉碎模块、高压水喷头、真空吸污输入口进入地下管道内部,然后启动智能粉碎模块和高压水喷头清洗。智能粉碎模块将地下管道内的沉积物粉碎,形成泥水混合物;泥水混合物实时进入真空吸污输入口,并传送到地面系统;安装在自主移动小车上的高压水喷头,对地下管道进行冲洗。自主移动小车在运动的同时,拖拉吸污管、高压水管、通讯动力缆线。
21.本发明的机器人,应用模块化设计技术,设计各种变速模块和粉碎模块,适应地下管道的不同工况。采用智能机器人技术、实时控制技术,智能吸附技术,实现了机器人运动、粉碎、吸污协同工作,同步同时进行,极大提高了清洗效率。
附图说明
22.下面通过具体实施方式结合附图对本申请作进一步详细说明。
23.图1为本发明的整体框架示意图;
24.图2为本发明中的智能粉碎模块一框架示意图;
25.图3为本发明中的智能粉碎模块另一框架示意图;
26.图4为本发明的一整体结构示意图;
27.图5为图4的一(部分)分解示意图;
28.其中,1、自主移动小车;11、车体;12、驱动轮;13、拉杆;2、智能粉碎模块;21、伺服电机模块;211、动力输出端;22、变速模块;22a、第一变速模块;22b、第二变速模块;221、动力传动端;222、输送孔;23、粉碎模块;231、壳体;232、粉碎机构;3、真空吸附模块;4、高压水清洗模块;5、连接孔;6、输水管。
具体实施方式
29.为使本实施方式的目的、技术方案和优点更加清楚,下面将结合本实施方式中的附图,对本实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本申请一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。
30.此外,术语“第一”、“第二”、“大”、“小”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“大”、“小”等的特征可以明示或者隐含地包括一个或者更多个该特征。
31.在本发明中,除非另有明确的规定和限定,术语“安装”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
32.实施例
33.参考图1至图5,本发明为一种模块化地下管道清洗机器人,其包括自主移动小车1、智能粉碎模块2、真空吸附模块3、高压水清洗模块4;所述自主移动小车1包括车体11,所述车体11两侧安装有驱动轮12,车体11上固定设置有拉杆13,该自主移动小车能依靠自身动力、驱动机构在地下管道内行走。智能粉碎模块2由三个模块组成,包括伺服电机模块21、变速模块22、粉碎模块23。伺服电机模块21采用伺服电机,其安装在车体11内部,所述变速模块22的一端设有与伺服电机的动力输出端211连接的联轴器端(图中未示)、另一端设有动力传动端221,粉碎模块23上设有与该动力传动端221匹配的对接端(图中未示),其中联轴器端、对接端均采用现有技术,在此不详述。所述车体前端面、变速模块、粉碎模块上均设有用于螺栓连接的连接孔5。自主移动小车1通过吸污管、通讯动力线缆、高压水管与地面的真空吸污系统连接。真空吸污输入口(图中未示)设置在车体前端面底部,变速模块22底部设有与该真空吸污输入口对接的输送孔222,所述粉碎模块23包括一壳体231,该壳体前端面设有粉碎机构232,壳体231内设有与所述输送孔222相通的输送通道(图中未示),通过与输送孔、真空吸污输入口等的配合,吸污管将粉碎模块粉碎的泥水混合物吸入吸污管。可以根据地下管道的工况,快速更换不同的变速模块22和粉碎模块23,可以根据需要选择不同参数的变速模块22,淤泥硬度高的情况选取力矩大、速度慢的第一变速模块22a,软的淤泥选择力矩小、速度快的第二变速模块22b。粉碎模块23中的粉碎机构有不同的结构,包括:甩刀式结构、双螺旋结构、盾构式结构。甩刀式结构可以打碎树枝、塑料袋;双螺旋结构可以粉碎纸浆块和石头等,盾构式结构适合污泥淤积比较严重情况的清洗。高压水清洗模块4采用高压水喷头,其安装在粉碎模块上,其通过输水管6与外界的高压水管连通,作为辅助清洗用。
34.本发明的工作流程如下:
35.1、通过管道检测机器人对地下管道工况的观察,选择合适的变速模块22和粉碎模块23,安装在自主移动小车1上。粉碎模块23有甩刀式结构、双螺旋结构、盾构式结构。根据地下管道沉积物的硬度,选择合适的变速模块。若沉积物硬度高,选择力矩大、速度慢的第一变速模块;若沉积物硬度低,选择力矩小、速度快的第二变速模块,其中第一、二变速模块
实际采用不同的减速机;
36.2、利用地面部分中的下井辅助模块,将模块化地下管道清洗机器人送入地下管道的窨井口;
37.3、自主移动小车1携带智能粉碎模块2、高压水喷头、真空吸污输入口自主运行,进入地下管道中;
38.4、吸污管、通讯动力线缆、高压水管安装在自主移动小车的尾部。自主移动小车在地下管道中行走时,同时牵引吸污管、通讯动力线缆、高压水管运动;
39.5、进入地下管道内部时,启动智能粉碎模块2和高压水喷头工作。将地下管道内的沉积物粉碎,并冲洗地下管道;
40.6、粉碎的泥水混合物,在地面的真空吸污系统作用下,实时通过真空吸污输入口进入吸污管。泥水混合物在吸污管中运动,最后到达地面的真空吸污系统进行处理。
41.本机器人应用模块化设计技术,设计各种变速模块和粉碎模块,适应地下管道的不同工况。采用智能机器人技术、实时控制技术,智能吸附技术,实现了机器人运动、粉碎、吸污协同工作,同步同时进行,极大提高了清洗效率。
42.以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1