一种市政工程用管道内壁污垢清理装置的制作方法
1.本发明涉及市政工程用领域,具体涉及一种市政工程用管道内壁污垢清理装置。
背景技术:
2.管道在工业生产和民用部门都有着广泛的应用,对于气液料流体采用管道方式运送具有方便、快捷和成本低等多种优点。但在长期使用过程中在管道的内壁上会沉积或形成污垢,如输水管道中会形成水垢或私泥垢,在工业的输气管道中也会形成结焦积碳等污垢,这些污垢沉积在管道中大大增加了气液流体在输送过程中的阻力,不仅使传输效率降低,而且使输送流体所需的动力能耗也大大增加,污垢还会对管道材料造成腐蚀和损害,严重时会使管道破裂,输送流体外泄造成损失,造成设备的损坏,严重影响经济效益,而现有技术中管道清理一般为人工清理,一方面清理效率低,影响生产,另一方面在清理管壁贴合紧密的沉渣,清理不方便,清理效果差。因此,发明一种管道内壁污垢清除机器人来解决上述问题很有必要。
技术实现要素:
3.为了解决上述存在的问题,本发明提供一种市政工程用管道内壁污垢清理装置。
4.本发明是通过以下技术方案实现:
5.一种市政工程用管道内壁污垢清理装置,包括桶体,所述桶体内侧壁上固定安装有电动伸缩杆,所述电动伸缩杆的伸缩端上固定有横杆,所述横杆两端处分别固定有限位圈,所述横杆上滑动套有套筒,所述套筒外圈面上均匀的固定有若干个连接块,所述桶体外圈面上均匀的开设有若干个滑槽,若干个滑槽的数量与若干个连接块的数量相等,所述桶体顶面固定安装有plc控制器,所述桶体底面固定安装有蓄电池,所述蓄电池一侧的桶体底面上固定安装有无线信号接收器,所述桶体外侧以其轴心线为中心均匀的分布有若干个n形板,若干个n形板的数量与若干个滑槽的数量相等,所述n形板上横向开设有第一滑槽,所述第一滑槽内滑动设有滑杆,所述n形板顶面和底面分别贴合有第一限位圈,所述第一限位圈固定套在滑杆上,所述滑杆朝向桶体外圈面一端处通过销铰接有拉杆,所述拉杆另一端穿过相对应的滑槽并伸入与桶体内,并与相对应的一个连接块通过销铰接,所述拉杆与滑槽滑动连接,所述n形板两侧分别固定有安装板,其中一个安装板侧壁上固定有第一安装板,所述第一安装板上并排贴合安装有若干个控制开关,另一个安装板侧壁上固定安装有l形安装板,所述l形安装板的横板上固定安装有罩体,所述罩体内设有电机,所述电机固定安装在l形安装板的横板上,所述电机的输出轴穿透l形安装板的横板并固定安装有滚轮,所述电机的输出轴与l形安装板的横板接触处旋转连接,所述l形安装板与n形板之间的一个安装板上固定安装有导向轮,所述第一安装板与n形板之间的一个安装板上贴合有第一导向轮,所述第一导向轮与导向轮之间通过皮带传动连接,所述皮带朝向n形板一侧的外圈面与滑杆固定连接,所述皮带外圈面另一侧固定安装有打磨块,所述第一导向轮与第一安装板之间设有固定块,所述固定块固定安装在安装板上,所述固定块侧壁上横向贯穿设有
方形杆,所述方形杆与固定块接触处滑动连接,所述方形杆朝向第一导向轮一侧与第一导向轮的支架侧壁固定连接,所述方形杆另一侧固定有挡块,所述挡块朝向第一安装板一侧固定有锥形杆,所述挡块与固定块之间固定设有弹簧,所述弹簧套设在方形杆上,所述固定块上固定安装有弹簧筒,所述弹簧筒内滑动设有滑块,所述滑块一端与固定块之间的弹簧筒内设有第一弹簧,所述滑块另一端上固定有顶杆,所述顶杆伸出弹簧筒并与其接触处滑动连接,所述顶杆另一端上镶嵌有滚珠,所述滚珠与顶杆接触处旋转连接,所述桶体两侧分别对称固定安装有第一电动伸缩杆,两个第一电动伸缩杆的伸缩端上分别固定有连接杆,所述连接杆靠近电动伸缩杆一端的外圈面上均匀的固定有若干个第一连接块,若干个第一连接块的数量与若干个n形板的数量相等,每个第一连接块上均通过销铰接有连接板,每个连接板另一端处均通过销铰接有第二连接块,若干个第二连接块分别与相对应的一个安装板固定连接,所述连接杆另一端处套设有圆环,所述圆环与连接杆旋转连接,所述圆环两侧分别贴合有第二限位圈,所述第二限位圈固定套在连接杆上,所述圆环侧壁上均匀的固定有若干个第一连接杆,若干个第一连接杆另一端固定有同一个箱体,所述箱体顶面固定安装有第一蓄电池,所述箱体底面固定安装有第一无线信号接收器,所述箱体两侧内壁上分别固定安装有第一电机和第二电机,所述第一电机的输出轴穿透箱体内壁并与连接杆侧端固定连接,所述第一电机的输出轴与箱体接触处密封旋转连接,所述第二电机的输出轴穿透箱体内壁并固定连接丝杠,所述第二电机的输出轴与箱体接触处密封旋转连接,所述箱体侧壁上固定有筒体,所述筒体套设在丝杠上,所述筒体外圈面上均匀的开设有四个第二滑槽,所述筒体另一端固定有安装块,所述安装块呈圆柱状,所述筒体上滑动套有第一套筒,所述第一套筒朝向安装块一侧呈锥形状,所述安装块朝向丝杠一侧的侧壁中央处固定镶嵌有轴承,所述丝杠朝向安装块一端插入轴承的内圈内并与其固定连接,所述丝杠上套设有丝杠螺母,所述丝杠螺母与丝杠接触处螺纹连接,所述丝杠螺母外圈面上均匀的固定有四个第一滑杆,四个第一滑杆另一端分别穿过相对应的第二滑槽并均与第一套筒内壁固定连接,所述第一滑杆与第二滑槽滑动连接,所述安装块外圈面上均匀的固定有四个第三连接块,四个第三连接块上分别通过销铰接有l形杆,所述l形杆的另一端上固定安装有第一滚轮。
6.优选的,所述电机为plf40型号的伺服电机。
7.优选的,所述电动伸缩杆、控制开关、电机、plc控制器、第一电动伸缩杆和无线信号接收器分别通过导线与蓄电池电性连接,且电动伸缩杆、控制开关、电机和第一电动伸缩杆分别通过导线与plc控制器电性连接,所述电动伸缩杆和第一电动伸缩杆分别通过导线与无线信号接收器电性连接。
8.优选的,所述第一电机、第二电机和第一无线信号接收器分别通过导线与第一蓄电池电性连接,且第一电机和第二电机分别通过导线与第一无线信号接收器电性连接。
9.优选的,所述打磨块为155mm
×
75mm
×
25mm尺码的打磨石。
10.优选的,所述无线信号接收器和第一无线信号接收器均为kr1204
‑
4型号的无线接收器。
11.与现有的技术相比,本发明的有益效果是:本发明通过打磨块的设置,能够高效的打磨掉管道内壁上的污垢,同时本装置通过第二电机和第一电动伸缩杆的设置,能够有效的适用于不同直径的钢管内壁污垢的清理工作上,而且通过若干个控制开关以及电机之间
的巧妙设置,本装置根据管道内壁污垢的厚度能够有效的自动控制前进的速度,从而通过自动控制前进速度来实现自动控制打磨时长的功能,对管壁污垢的清理效果更好,有效的替代了人工清理管道内壁的工作,并节省大量的时间精力以及清理费用,由于本装置具有在管道内自动前进的功能,所以能替代人工操作或者进入工人无法到达的场合进行操作,因此具有很髙的推广应用价值。
附图说明
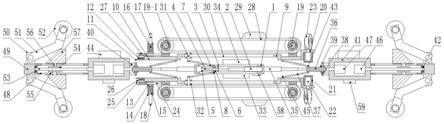
12.图1是本发明所述结构的结构图;
13.图2是本发明所述结构图1中若干个n形板9的分布示意图;
14.图3是本发明所述结构的工作示意图;
15.图4是本发明所述结构的工作示意图。
16.图中:桶体1、电动伸缩杆2、滑槽3、横杆4、限位圈5、套筒6、拉杆7、连接块8、n形板9、安装板10、第一安装板11、控制开关12、固定块13、弹簧筒14、滑块15、第一弹簧16、顶杆17、滚珠18、导向轮19、第一导向轮19
‑
1、l形安装板20、罩体21、电机22、滚轮23、方形杆24、挡块25、锥形杆26、弹簧27、皮带28、打磨块29、第一滑槽30、滑杆31、第一限位圈32、蓄电池33、plc控制器34、第一电动伸缩杆35、连接杆36、连接板37、圆环38、第二限位圈39、第一连接杆40、箱体41、轴承42、第一连接块43、第一蓄电池44、第二连接块45、第二电机46、第一电机47、筒体48、安装块49、第三连接块50、l形杆51、第一滚轮52、丝杠53、丝杠螺母54、第二滑槽55、第一滑杆56、第一套筒57、无线信号接收器58、第一无线信号接收器59。
具体实施方式
17.下面结合附图与具体实施方式对本发明作进一步详细描述:
18.如图1、图2、图3、图4所示,一种市政工程用管道内壁污垢清理装置,包括桶体1,所述桶体1内侧壁上固定安装有电动伸缩杆2,所述电动伸缩杆2的伸缩端上固定有横杆4,所述横杆4两端处分别固定有限位圈5,所述横杆4上滑动套有套筒6,所述套筒6外圈面上均匀的固定有若干个连接块8,所述桶体1外圈面上均匀的开设有若干个滑槽3,若干个滑槽3的数量与若干个连接块8的数量相等,所述桶体1顶面固定安装有plc控制器34,所述桶体1底面固定安装有蓄电池33,所述蓄电池33一侧的桶体1底面上固定安装有无线信号接收器58,所述桶体1外侧以其轴心线为中心均匀的分布有若干个n形板9,若干个n形板9的数量与若干个滑槽3的数量相等,所述n形板9上横向开设有第一滑槽30,所述第一滑槽30内滑动设有滑杆31,所述n形板9顶面和底面分别贴合有第一限位圈32,所述第一限位圈32固定套在滑杆31上,所述滑杆31朝向桶体1外圈面一端处通过销铰接有拉杆7,所述拉杆7另一端穿过相对应的滑槽3并伸入与桶体1内,并与相对应的一个连接块8通过销铰接,所述拉杆7与滑槽3滑动连接,所述n形板9两侧分别固定有安装板10,其中一个安装板10侧壁上固定有第一安装板11,所述第一安装板11上并排贴合安装有若干个控制开关12,另一个安装板10侧壁上固定安装有l形安装板20,所述l形安装板20的横板上固定安装有罩体21,所述罩体21内设有电机22,所述电机22固定安装在l形安装板20的横板上,所述电机22的输出轴穿透l形安装板20的横板并固定安装有滚轮23,所述电机22的输出轴与l形安装板20的横板接触处旋转连接,所述l形安装板20与n形板9之间的一个安装板10上固定安装有导向轮19,所述第一
安装板11与n形板9之间的一个安装板10上贴合有第一导向轮19
‑
1,所述第一导向轮19
‑
1与导向轮19之间通过皮带28传动连接,所述皮带28朝向n形板9一侧的外圈面与滑杆31固定连接,所述皮带28外圈面另一侧固定安装有打磨块29,所述第一导向轮19
‑
1与第一安装板11之间设有固定块13,所述固定块13固定安装在安装板10上,所述固定块13侧壁上横向贯穿设有方形杆24,所述方形杆24与固定块13接触处滑动连接,所述方形杆24朝向第一导向轮19
‑
1一侧与第一导向轮19
‑
1的支架侧壁固定连接,所述方形杆24另一侧固定有挡块25,所述挡块25朝向第一安装板11一侧固定有锥形杆26,所述挡块25与固定块13之间固定设有弹簧27,所述弹簧27套设在方形杆24上,所述固定块13上固定安装有弹簧筒14,所述弹簧筒14内滑动设有滑块15,所述滑块15一端与固定块13之间的弹簧筒14内设有第一弹簧16,所述滑块15另一端上固定有顶杆17,所述顶杆17伸出弹簧筒14并与其接触处滑动连接,所述顶杆17另一端上镶嵌有滚珠18,所述滚珠18与顶杆17接触处旋转连接,所述桶体1两侧分别对称固定安装有第一电动伸缩杆35,两个第一电动伸缩杆35的伸缩端上分别固定有连接杆36,所述连接杆36靠近电动伸缩杆35一端的外圈面上均匀的固定有若干个第一连接块43,若干个第一连接块43的数量与若干个n形板9的数量相等,每个第一连接块43上均通过销铰接有连接板37,每个连接板37另一端处均通过销铰接有第二连接块45,若干个第二连接块45分别与相对应的一个安装板10固定连接,所述连接杆36另一端处套设有圆环38,所述圆环38与连接杆36旋转连接,所述圆环38两侧分别贴合有第二限位圈39,所述第二限位圈39固定套在连接杆36上,所述圆环38侧壁上均匀的固定有若干个第一连接杆40,若干个第一连接杆40另一端固定有同一个箱体41,所述箱体41顶面固定安装有第一蓄电池44,所述箱体41底面固定安装有第一无线信号接收器59,所述箱体41两侧内壁上分别固定安装有第一电机47和第二电机46,所述第一电机47的输出轴穿透箱体41内壁并与连接杆36侧端固定连接,所述第一电机47的输出轴与箱体41接触处密封旋转连接,所述第二电机46的输出轴穿透箱体41内壁并固定连接丝杠53,所述第二电机46的输出轴与箱体41接触处密封旋转连接,所述箱体41侧壁上固定有筒体48,所述筒体48套设在丝杠53上,所述筒体48外圈面上均匀的开设有四个第二滑槽55,所述筒体48另一端固定有安装块49,所述安装块49呈圆柱状,所述筒体48上滑动套有第一套筒57,所述第一套筒57朝向安装块49一侧呈锥形状,所述安装块49朝向丝杠53一侧的侧壁中央处固定镶嵌有轴承42,所述丝杠53朝向安装块49一端插入轴承42的内圈内并与其固定连接,所述丝杠53上套设有丝杠螺母54,所述丝杠螺母54与丝杠53接触处螺纹连接,所述丝杠螺母54外圈面上均匀的固定有四个第一滑杆56,四个第一滑杆56另一端分别穿过相对应的第二滑槽55并均与第一套筒57内壁固定连接,所述第一滑杆56与第二滑槽55滑动连接,所述安装块49外圈面上均匀的固定有四个第三连接块50,四个第三连接块50上分别通过销铰接有l形杆51,所述l形杆51的另一端上固定安装有第一滚轮52。
19.所述电机22为plf40型号的伺服电机。
20.所述电动伸缩杆2、控制开关12、电机22、plc控制器34、第一电动伸缩杆35和无线信号接收器58分别通过导线与蓄电池33电性连接,且电动伸缩杆2、控制开关12、电机22和第一电动伸缩杆35分别通过导线与plc控制器34电性连接,所述电动伸缩杆2和第一电动伸缩杆35分别通过导线与无线信号接收器58电性连接。
21.所述第一电机47、第二电机46和第一无线信号接收器59分别通过导线与第一蓄电
池44电性连接,且第一电机47和第二电机46分别通过导线与第一无线信号接收器59电性连接。
22.所述打磨块29为155mm
×
75mm
×
25mm尺码的打磨石。
23.所述无线信号接收器58和第一无线信号接收器59均为kr1204
‑
4型号的无线接收器。
24.工作原理:本发明在使用时,如图3所示,将本装置从管道端口放进管道内,随后工作人员通过遥控器给两个第一无线信号接收器59启动两个第二电机46的指令,使得两个第二电机46启动运行,第二电机46运行时带动丝杠53转动,丝杠53转动时能够带动丝杠螺母54在丝杠53上移动,通过第二电机46带动丝杠螺母54向安装块49方向移动,丝杠螺母54移动时通过第一滑杆56同步带动第一套筒57向安装块49方向移动,此过程中第一套筒57侧壁上的锥形面会同时推动四个l形杆51,进而使得四个第一滚轮52贴紧管道内壁,这样当本装置两端处的两组第一滚轮52均与管道内壁紧密的贴合后,在通过遥控器给第一无线信号接收器59停止第二电机46的指令,通过两组第一滚轮52能够有效的定位中心,使得本装置稳定的处在管道内,随后在通过遥控器给无线信号接收器58启动两个第一电动伸缩杆35的指令(如图4所示),两个第一电动伸缩杆35收到启动指令时在plc控制器34的作用下实现同步伸缩,这样使得两个第一电动伸缩杆35的伸缩端缩回,两个第一电动伸缩杆35的伸缩端缩回时同步拉动两个连接杆36,连接杆36被拉动时会通过连接板37推动安装板10,使得n形板9向钢管内壁方向移动,当n形板9在连接板37的推动移动时,n形板9会通过拉杆7会拉动套筒6在横杆4上滑动一段距离,由于在横杆4上的两个限位圈5之间预留给套筒6足够的滑动空间,所以不会影响n形板9的移动,随着n形板9的移动,打磨块29先与钢管内壁接触,随后顶杆17上的滚珠18以及滚轮23与钢管内壁接触,当滚轮23与钢管内壁紧密贴合后,在通过遥控器给无线信号接收器58停止第一电动伸缩杆35的指令,这样就做好了把本装置固定放置到钢管内的工作。此时在通过遥控器给无线信号接收器58启动电动伸缩杆2的指令,电动伸缩杆2在plc控制器34的作用下做往复伸缩运动,电动伸缩杆2的伸缩端在伸缩过程中会同步带动横杆4移动,横杆4随着电动伸缩杆2的伸缩端来回移动时,在两个限位圈5的阻挡下套筒6也会随着横杆4来回移动,套筒6移动时会通过拉杆7同步带动滑杆31来回移动,滑杆31来回移动时会带动皮带28来回传动,皮带28来回传动时同步带动打磨块29来回移动,打磨块29来回移动时能够有效的打磨掉管道内壁上的污垢,这时在通过遥控器同时给两个第一无线信号接收器59启动两个第一电机47的指令,两个第一电机47运行时其输出端会相对同向转动,带动两个连接杆36同步同方向转动,随着连接杆36的转动,若干个n形板9同步随之转动,此时若干个打磨块29会旋转打磨管道内壁,进而达到打磨钢管内壁污垢的目的。由于打磨块29先与钢管内壁接触,随后滚轮23才与钢管内壁接触,所以滚轮23与钢管内壁接触时,打磨块29会压住拉动皮带28,随着皮带28会拉动,第一导向轮19
‑
1会向导向轮19方向移动一端距离,第一导向轮19
‑
1移动时同步带动方形杆24移动,此时弹簧27受到挤压,弹簧27始终给予第一导向轮19
‑
1反向作用力。使得第一导向轮19
‑
1与导向轮19之间的皮带28始终处在绷紧状态,保证打磨块29始终与钢管内壁紧密贴合,当方形杆24被拉动时其侧端的挡块25会带动锥形杆26同步移动,锥形杆26随着方形杆24向导向轮19方向移动时,锥形杆26的尖头会按压到并排安装的若干个控制开关12中的第一个控制开关12,当第一个控制开关12被按压时,在plc控制器34的作用下电机22会带动滚轮23顺时针方向转动一定的角
度(转动角度可通过plc控制器34自由设置),当滚轮23转动一定的角度时,由于滚轮23随着n形板9同步转动,所以此时滚轮23会给予本装置螺旋向前的前进力度,这样本装置能够实现一边打磨一边缓慢前进的工作过程,本装置有效的达到了自动前进的目的,随着本装置在管道内前进,当遇到管道内壁上的污垢较厚处时,打磨块29会继续下压皮带28,此时皮带28再次受到拉力,锥形杆26继续向导向轮19方向移动,按压并排安装的若干个控制开关12中的第二个控制开关12(或者第三个控制开关12、或者第四个控制开关12、或者第五个控制开关12
…
,管道内壁上污垢的厚度决定被按压控制开关12的位置,污垢越厚若干个控制开关12中的被按压的控制开关12的位次越靠后),当第二个控制开关12被按压时,滚轮23在电机22的带动下回正一定的角度,当第三个控制开关12被按压时滚轮23在电机22的带动下再次回正一定的角度,以此类推,随着被按动控制开关12的位次靠后滚轮23的回正角度递增,随着滚轮23的回正,滚轮23带动本装置螺旋向前前进的速度变慢,由于本装置前进的速度变缓,打磨块29在污垢较厚地方打磨的时间会变长,从而有效的保证污垢较厚的地方也能够充分的被打磨掉,而且通过若干个控制开关12以及电机22的之间的巧妙设置,根据污垢的厚度能够有效的自动控制本装置前进的速度,从而通过自动控制前进速度来实现自动控制打磨时长的功能。
25.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1