一种实现海漂垃圾捕获和运输的水上机器人
1.本发明涉及海洋环境清洁技术领域,具体而言,涉及一种实现海漂垃圾捕获和运输的水上机器人。
背景技术:
2.2014年12月,美国五环流研究所通过多年大洋打捞统计及数学模型评估认为,全球海洋中漂浮着5.25万亿个塑料碎片,总质量约为26.9万吨。世界经济论坛也发布报告称,到2050年,海洋中的漂浮塑料最终将超过鱼类。2018年中国国家生态环境部发布的海洋环境状况公报显示,海洋垃圾密度较高的区域主要分布在旅游休闲娱乐区、港口航运及临近海域。其中,尤其是人类活动密集的海滩区域,垃圾的平均个数和平均密度均高于其他区域。随着海漂垃圾的与日俱增,海洋生态受到极大破坏的同时,其对航行安全、海上作业、海上搜救也造成了越来越大的干扰。
3.公告号为cn205186476u的中国发明专利公开了一种海洋垃圾回收装置,包括基体和垃圾手机装置,还包括动力系统和控制系统,机体为长方体结构,机体底部设有矩形凹槽,垃圾收集装置位于矩形凹槽下方;动力系统包括设置在矩形凹槽两侧机体底部的推进装置、位于机体内部的电源和位于机体顶部的太阳能发电设备,太阳能发电设备与电源连接;控制系统包括遥控器,信号接收器、扬声器和电源开关。此装置利用一面开口的长方体漂浮于水中收集漂浮垃圾,并利用长方体顶部收集太阳能供电。但是该装置属传统点式收集,效率较低且太阳能板提供的能量难以满足装置运行需要。申请号为cn201611172930.0的中国发明专利公开了一种海上垃圾自动收集机器人,此装置利用涡旋收集海漂垃圾,履带传输海漂垃圾,并利用太阳能为整个装置供电。此装置亦属传统点式吸收,由于海面环境复杂,采用能量较小的涡旋会完全被淹没在波浪之中使其效果不明显,较大的涡旋则需要消耗极大的能量,使用太阳能供电难以满足该装置运行的需求。
4.目前的海漂垃圾收集机器人绝大多数为主动式
‑
点式收集。对分散的海漂垃圾而言,采用此类型装备收集单个海漂垃圾能耗太大,且难以做到24小时不间断收集。而具有断面收集能力的布置于离岸的一些海漂垃圾拦截装置往往只能将垃圾汇聚,汇聚后的海漂垃圾仍然需要垃圾船进行回收。
技术实现要素:
5.本发明提供了一种实现海漂垃圾捕获和运输的水上机器人,旨在改善现有的海漂垃圾收集机器人收集分散的海漂垃圾时能耗大且难以做到不间断收集以及收集后的海漂垃圾无法自动回收等问题。
6.本发明是这样实现的:
7.一种实现海漂垃圾捕获和运输的水上机器人,包括:
8.储能单元,用于能量的储存和释放;
9.浮式栅栏,分别配置在所述储能单元的两侧,用于拦截海漂垃圾,所述浮式栅栏远
离所述储能单元的一端还设有一锚链,用于将所述浮式栅栏固定在海床上;
10.若干个能量捕获单元,分别配置在所述浮式栅栏上,所述能量捕获单元还与所述储能单元连接,用于将捕获的能量输送到所述储能单元;
11.主控单元,与所述储能单元连接;
12.浮式运输机器人,配置在所述储能单元内并与所述主控单元电连接,所述浮式运输机器人被构造成在垃圾捕获阶段可固定于所述储能单元中进行充电,以及在充电完成和垃圾捕获完成后,所述主控单元控制所述储能单元释放所述浮式运输机器人,并控制该浮式运输机器人将捕获到所述浮式运输机器人内的海漂垃圾运送到指定位置并返回所述储能单元内。
13.进一步地,在本发明较佳的实施例中,所述浮式栅栏包括拦截屏幕、拦截浮筒以及若干个重力球,所述拦截屏幕近水的一侧等间距设有若干个所述重力球,其远离所述重力球的一侧设有所述拦截浮筒。
14.进一步地,在本发明较佳的实施例中,所述能量捕获单元包括支撑桁架和太阳能电板,所述支撑桁架架设在所述拦截浮筒上,所述太阳能电板固定连接在所述支撑桁架上,并通过电缆与所述储能单元连接。
15.进一步地,在本发明较佳的实施例中,所述能量捕获单元还包括支撑底座、支撑杆、航行提示灯和风力发电机,所述支撑底座固定连接在所述太阳能电板上,所述支撑杆的一端与所述支撑底座连接,其远离所述支撑底座的一端与所述航行提示灯连接,所述航行提示灯远离所述支撑杆的一端还连接有一所述风力发电机,所述航行提示灯和所述风力发电机还分别通过电缆与所述储能单元连接。
16.进一步地,在本发明较佳的实施例中,所述储能单元包括机器人阻拦杆、机器人引导板以及两个对称设置的浮力板,两个所述浮力板之间通过若干个储能单元连接杆固定连接并形成有一用于容纳所述浮式运输机器人的空间,两个所述浮力板的一端还分别和与其对应的所述浮式栅栏连接以形成一垃圾拦截区域,所述机器人阻拦杆位于所述浮力板与所述浮式栅栏连接的一端,且所述机器人阻拦杆的两端分别和与其对应的所述浮力板连接,所述浮力板远离所述机器人阻拦杆的一端还设有一机器人引导板,两个所述机器人引导板形成一呈扇形且开口朝外的空间。
17.进一步地,在本发明较佳的实施例中,所述储能单元还包括垃圾挡板、垃圾挡板旋转轴杆以及套设在所述垃圾挡板旋转轴杆上的旋转环,所述垃圾挡板旋转轴杆设于两个所述浮力板之间,且其两端分别和与其对应的所述浮力板连接,所述垃圾挡板与所述旋转环固定连接,所述旋转环被构造成在所述浮式运输机器人的带动下可绕所述垃圾挡板旋转轴杆转动,进而带动所述垃圾挡板绕所述垃圾挡板旋转轴杆转动以使所述浮式运输机器人进入所述储能单元,以及在所述浮式运输机器人离开所述储能单元时,在重力作用下所述垃圾挡板自动垂下,用于防止海漂垃圾越过所述垃圾挡板。
18.进一步地,在本发明较佳的实施例中,所述储能单元还包括一充电卡座和储能单元电池,所述充电卡座包括充电卡座本体、导杆、充电卡头以及设于所述充电卡座本体上的电磁铁,所述导杆的一端与所述充电卡座本体连接,其另一端与所述浮力板固定连接,所述充电卡头靠近所述浮力板的一端设有一固定球,所述充电卡头靠近所述充电卡座本体处还设有一固定销,且所述固定销位于所述充电卡座本体远离所述固定球的一侧,所述充电卡
头和所述电磁铁分别与所述储能单元电池电连接,所述电磁铁还与所述主控单元电连接,所述充电卡头被构造成在所述浮式运输机器人完全进入所述储能单元时可通过所述充电卡头对所述浮式运输机器人进行充电,以及通过所述主控单元控制所述电磁铁通电产生磁力进而将所述充电卡头吸起,以使所述浮式运输机器人与所述充电卡头分离。
19.进一步地,在本发明较佳的实施例中,所述浮式运输机器人包括机器人本体、涡轮电机和机器人电池,所述机器人本体包括镂空网以及分设于两侧的机器人浮力板,两个所述机器人浮力板通过机器人框架杆固定连接并与所述镂空网连接形成一用于容纳海漂垃圾的垃圾筐,所述涡轮电机分设于所述机器人本体的四周且位于该机器人本体的下方,所述机器人电池设于所述机器人浮力板内,且与所述涡轮电机连接,所述涡轮电机和所述机器人电池还分别与所述主控单元电连接,所述机器人本体上开设有一用于捕获海漂垃圾的开口,所述机器人本体靠近所述开口的一端的两侧还分别设有一充电卡头引导板。
20.进一步地,在本发明较佳的实施例中,所述浮式运输机器人还包括一位于所述开口处的越浪式单向门,所述越浪式单向门包括单向门板、连接杆、固定帽、浮力胶囊以及固定在所述单向门板上的转动杆,所述转动杆位于所述机器人浮力板之间且其两端分别和与其对应的所述机器人浮力板可转动连接,进而带动所述单向门板转动,所述单向门板上开设有一贯穿式导槽,所述连接杆贯穿所述贯穿式导槽,且所述连接杆近水的一侧连接有一所述浮力胶囊,其背水的一侧连接有一固定帽,所述单向门板远离所述转动杆的一端还设有若干个齿式倒钩。
21.进一步地,在本发明较佳的实施例中,所述浮式运输机器人远离所述开口一端还设有固定钩,所述固定钩分别与所述机器人电池和所述主控单元电连接,所述浮式运输机器人被构造成可通过将所述充电卡头卡设在所述固定钩上以将所述储能单元的能量通过所述充电卡头和所述固定钩输送到所述机器人电池内,用于为所述浮式运输机器人提供能量补给。
22.本发明的有益效果是:
23.1、本发明的实现海漂垃圾捕获和运输的水上机器人包括储能单元、浮式栅栏、能量捕获单元、主控单元和浮式运输机器人。储能单元分别与浮式栅栏、能量捕获单元、主控单元和浮式运输机器人连接。主控单元分别与浮式运输机器人连接。浮式栅栏配置在储能单元的两侧,用于拦截海漂垃圾。浮式运输机器人被构造成在垃圾捕获阶段可固定于储能单元中进行充电,以及在充电完成和垃圾捕获完成后,主控单元控制储能单元释放浮式运输机器人并控制该浮式运输机器人将捕获到浮式运输机器人内的海漂垃圾运送到指定位置并返回储能单元内。本发明利用浮式栅栏和浮式运输机器人在人类活动密集的近岸重点海域实现了24小时海漂垃圾的自动不间断断面拦截收集,保证垃圾捕获截面后方的沙滩,港口等重点区域不被海漂垃圾入侵。相比于传统的离岸垃圾拦截装置必须依靠专用的垃圾船人工点式收集极大地提高了收集效率,同时大大减小了人力、资金成本及能量消耗。此外,浮式运输机器人的迎浪部分均为镂空网,从而大大减小了其迎浪迎风时的作用力,极大提高了其对恶劣海况的适应能力。
24.2、本发明将浮式栅栏与能量捕获单元相结合。浮式栅栏能为能量捕获单元提供了良好的海上稳定固定平台。能量捕获单元设有太阳能电板和风力发电机,其能利用海上太阳能及风能等清洁能源完成能量获取从而为整个装置运行提供能量。
25.3、本发明的能量捕获单元还设有航行提示灯,可有效提醒来往船舶规避此类断面式布置的海漂垃圾收集装置,避免该水上机器人被破坏。
26.4、本发明的浮式栅栏包括拦截屏幕、拦截浮筒以及若干个重力球。此结构不但可以拦截水面垃圾,而且对水下一定深度的垃圾也有拦截作用。在拦截屏幕上设有镂空单元,可通过控制拦截屏幕上镂空单元的尺寸从而控制需阻挡的垃圾的尺寸。
附图说明
27.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
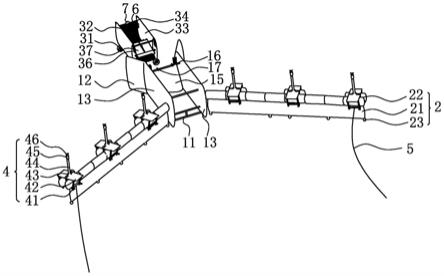
28.图1是本发明实施例的实现海漂垃圾捕获和运输的水上机器人在第一视角下的结构示意图;
29.图2是本发明实施例的浮式栅栏和能量捕获单元的结构示意图;
30.图3是本发明实施例的实现海漂垃圾捕获和运输的水上机器人在第二视角下的结构示意图;
31.图4是本发明实施例的实现海漂垃圾捕获和运输的水上机器人的主视图;
32.图5是本发明实施例的浮式运输机器人的结构示意图;
33.图6是本发明实施例的越浪式单向门在第一视角下的结构示意图;
34.图7是本发明实施例的越浪式单向门在第二视角下的结构示意图;
35.图8是本发明实施例的实现海漂垃圾捕获和运输的水上机器人在垃圾收集阶段的工作状态示意图;
36.图9是本发明实施例的实现海漂垃圾捕获和运输的水上机器人在正向波浪作用时的工作状态示意图;
37.图10是本发明实施例的实现海漂垃圾捕获和运输的水上机器人在反向波浪作用时的工作状态示意图;
38.图11是本发明实施例的实现海漂垃圾捕获和运输的水上机器人离开储能单元的工作状态示意图。
具体实施方式
39.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
40.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、
“
厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
42.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
43.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
44.参照图1所示,本发明的实施例提供了一种实现海漂垃圾捕获和运输的水上机器人,包括储能单元1、浮式栅栏2、主控单元、浮式运输机器人3和若干个能量捕获单元4。所述主控单元分别与储能单元1和浮式运输机器人3连接。
45.参照图1和图2所示,在本实施例中,所述浮式栅栏2分别配置在储能单元1的两侧,用于拦截海漂垃圾。具体地,所述浮式栅栏2包括拦截屏幕21、拦截浮筒22以及若干个重力球23。所述拦截屏幕21近水的一侧等间距设有若干个重力球23,其远离重力球23的一侧设有拦截浮筒22。优选地,两个浮式栅栏2和储能单元1之间形成一个左右对称的v型海漂垃圾拦截区域。当然需要说明的是,在本发明的其他实施例中,浮式栅栏2和储能单元1之间还可根据实际海岸线或航道布置成其他形状的海漂垃圾拦截区域,本发明不做具体限定。在本发明的优选实施例中,所述拦截屏幕21上还设有镂空单元,该镂空单元的大小可根据需要拦截的漂浮垃圾的尺寸而定。
46.参照图1所示,在本实施例中,所述浮式栅栏2远离储能单元1的一端还设有锚链5。所述锚链5远离浮式栅栏2的一端通过沉石或铁锚稳固在海床上,进而将浮式栅栏2固定在海床上。
47.参照图1和图2所示,在本实施例中,所述浮式栅栏2上等间距分布有若干个能量捕获单元4。所述能量捕获单元4与储能单元1连接,用于将捕获的能量输送到储能单元1内。
48.在本实施例中,所述能量捕获单元4包括支撑桁架41和太阳能电板42。所述支撑桁架41架设在拦截浮筒22上。所述太阳能电板42固定连接在支撑桁架41上。优选地,支撑桁架41通过焊接或螺钉连接的方式将拦截浮筒22和太阳能电板42固定连接。所述太阳能电板42通过电缆与储能单元1连接,用于将太阳能电板42产生的能量输送到储能单元1中以供水上
机器人工作使用。
49.在本实施例中,所述能量捕获单元4还包括支撑底座43、支撑杆44、航行提示灯45和风力发电机46。所述支撑底座43通过焊接或螺钉固定连接在太阳能电板42上。所述支撑杆44的一端与支撑底座43焊接或螺纹连接,其远离支撑底座43的一端与航行提示灯45连接。所述航行提示灯45远离支撑杆44的一端还连接有一风力发电机46。航行提示灯45和风力发电机46还分别通过电缆与储能单元1连接。本发明通过太阳能电板42和风力发电机46可将太阳能和风能转化成电能并将其储存在储能单元1内,以为水上机器人提供能量补给。太阳能电板42和风能发电机46的数量可根据实际工程需要进行设置。同时,通过设置航行提示灯45,可以提醒海上航行船舶此处布置有浮式栅栏,以防止过往船舶损坏布放范围较大的浮式栅栏2。
50.参照图1和图3所示,在本实施例中,所述储能单元1包括机器人阻拦杆11、机器人引导板12以及两个对称设置的浮力板13。两个浮力板13之间通过若干个储能单元连接杆14固定连接并形成有一用于容纳浮式运输机器人的空间。两个浮力板13的一端还分别和与其对应的浮式栅栏2连接以形成一垃圾拦截区域。所述机器人阻拦杆11位于浮力板13与浮式栅栏2连接的一端,且该机器人阻拦杆11的两端分别和与其对应的浮力板13连接。通过设置机器人阻拦杆11可将浮式运输机器人3固定在储能单元1内。所述浮力板13远离机器人阻拦杆11的一端还设有一机器人引导板12,两个机器人引导板12形成一呈扇形且开口朝外的空间。优选地,机器人引导板12焊接在浮力板13上。
51.参照图3所示,具体地,在本实施例中,所述储能单元1包括垃圾挡板15、垃圾挡板旋转轴杆16以及套设在垃圾挡板旋转轴杆16上的旋转环17。所述垃圾挡板旋转轴杆16设于两个浮力板13之间,且其两端分别和与其对应的浮力板13连接。垃圾挡板15焊接在旋转环17上。所述旋转环17被构造成在浮式运输机器人3的带动下可绕垃圾挡板旋转轴杆16转动,进而带动垃圾挡板15绕垃圾挡板旋转轴杆16转动以使浮式运输机器人3进入储能单元1,以及在浮式运输机器人3离开储能单元时,在重力作用下垃圾挡板15自动垂下,用于防止在垃圾回收期间海漂垃圾越过整个垃圾拦截截面。
52.在本实施例中,所述浮式运输机器人3配置在储能单元1内并与主控单元电连接。所述浮式运输机器人3被构造成在垃圾捕获阶段可固定于储能单元1中进行充电,以及在充电完成和垃圾捕获完成后,所述主控单元控制储能单元1释放浮式运输机器人3,并控制该浮式运输机器人3将海漂垃圾运送到指定位置后返回储能单元1内。
53.参照图1和图5所示,具体地,所述浮式运输机器人3包括机器人本体、涡轮电机31和机器人电池。涡轮电机31和机器人电池分别通过电缆与主控单元连接。所述机器人本体包括镂空网32以及分设于两侧的机器人浮力板33。两个机器人浮力板33通过机器人框架杆34固定连接并与镂空网42连接形成一用于容纳海漂垃圾的垃圾筐。所述涡轮电机31分设于机器人本体的四周且位于该机器人本体的下方,用于为浮式运输机器人3提供运动动力。优选地,涡轮电机31焊接或通过螺钉连接在机器人本体上。所述机器人电池设于机器人浮力板33内,且与涡轮电机31连接。
54.参照图1和图10所示,所述机器人本体上开设有一用于捕获海漂垃圾的开口35。在机器人本体靠近开口35的一端的两侧还分别设有一充电卡头引导板36。通过设置充电卡头引导板36可在浮式运输机器人3进入储能单元1时顶开充电卡头183,使得浮式运输机器人3
能顺利进入储能单元1。
55.参照图1和图5~7所示,在本实施例中,所述浮式运输机器人3还包括一位于开口35处的越浪式单向门37。所述越浪式单向门37包括单向门板371、连接杆372、固定帽373、浮力胶囊374以及固定在单向门板371上的转动杆375。所述转动杆375位于机器人浮力板33之间且其两端分别和与其对应的机器人浮力板33可转动连接,进而带动单向门板371转动。具体地,所述转动杆375焊接或螺纹连接于单向门板371上。在转动杆375的两端设有两个固定球376。优选地,固定球376通过焊接或螺纹连接固定于转动杆375的两端。在机器人浮力板33上设有两个门板固定环377,转动杆375贯穿于门板固定环377,并使得固定球376位于门板固定环377远离转动杆375的一侧,从而将转动杆375固定在机器人本体上。
56.参照图6和图7所示,在本实施例中,所述单向门板371上开设有一贯穿式导槽378。所述连接杆372贯穿该贯穿式导槽378,且连接杆372近水的一侧连接有一浮力胶囊374,其背水的一侧连接有一固定帽373。所述单向门板371远离转动杆375的一端还设有若干个齿式倒钩379。当波浪正面来袭时,波浪将携带着海漂垃圾沿着单向门板371爬坡。此时,在波浪自身重力和单向门板371的杠杆效应的作用下,单向门板371及转动杆375绕门板固定环377转动使得波浪及其携带的海漂垃圾将以越浪的形式轻松地进入浮式运输机器人3内。由于单向门板371上设有浮力胶囊374,在浮力胶囊374的作用下,越浪式单向门37能始终保持以较小的倾角正面迎浪。当反向波浪作用时,海漂垃圾将被单向门板371的反面以及齿式倒钩379阻挡,从而使得进入机器人本体内的垃圾不能逃离。
57.参照图1和图4所示,在本实施例中,所述储能单元1还包括一充电卡座18和储能单元电池。所述充电卡座18包括充电卡座本体181和导杆182。充电卡座本体181通过充电卡座框架杆相互焊接组成。所述导杆182的一端与充电卡座本体181连接,其另一端与浮力板13固定连接。通过设置导杆182可以引导浮式运输机器人3顺利进入储能单元1内,避免浮式运输机器人3被充电卡座本体181卡住。
58.参照图4所示,在本实施例中,所述充电卡座18还包括充电卡头183以及设于充电卡座本体181上的电磁铁184。具体地,所述充电卡头183靠近浮力板13的一端设有一固定球185。在充电卡头183靠近充电卡座本体181处还设有一固定销186,且固定销186位于充电卡座本体181远离固定球185的一侧。通过固定销186、固定球185和充电卡座本体181的配合可将充电卡头183限制在充电卡座本体181上,并可使充电卡头183沿着充电卡座本体181做垂向运动。优选地,充电卡头183为金属材质。当然需要说明的是,在本发明的其他实施例中,充电卡头183还可由其他可导电的材质制成,本发明不做具体限定。所述充电卡头183和电磁铁184还分别与储能单元电池电连接。
59.参照图1、图4、图10和图11所示,在本实施例中,所述浮式运输机器人3远离开口35一端还设有固定钩38。所述固定钩38分别通过电缆与机器人电池和主控单元连接。优选地,固定钩38为金属材质。所述浮式运输机器人3被构造成可在其完全进入储能单元1时通过将充电卡头183卡设在固定钩38上,进而将储能单元1的能量通过充电卡头183和固定钩38输送到机器人电池中对其进行能量补给,以及通过主控单元控制电磁铁184通电产生磁力进而将充电卡头183吸起以使浮式运输机器人3与充电卡头183分离。本发明的浮式运输机器人3在海漂垃圾收集时段可自行停靠于储能单元1之中,并利用停靠时间完成能量获取。垃圾收集满后在主控单元的控制下自动离开储能单元1并将垃圾送回岸边,卸下垃圾后再返
回储能单元1进入下一收集循环。
60.参照图1和图4所示,当浮式运输机器人3进入储能单元1时,在充电卡头引导板36的作用下充电卡头183可沿着充电卡座本体181的框架作向上垂向运动以便于浮式运输机器人3顺利进入储能单元1。当浮式运输机器人3完全进入后,充电卡头183在重力作用下落入固定钩38。由于固定钩38为金属材质并通过电缆与机器人电池相连,充电卡头183亦为金属材质并通过电缆与储能单元电池相连,两者相互接触不但可以起到固定浮式运输机器人3的作用,还可以完成对该浮式运输机器人3的能源补给。当浮式运输机器人3要离开储能单元1时,电磁铁184通电产生磁力将充电卡头183吸起,从而使得浮式运输机器人3摆脱储能单元1的束缚,可返回岸边卸载浮式垃圾。因此通过设置充电卡头183和固定钩38,一方面可以在收集垃圾期间通过充电卡头183和固定钩38对浮式运输机器人3进行充电,另一方面还可以限制浮式运输机器人3以避免其随波浪运动。
61.为便于对本发明的理解,下面对本发明的一些优选实施例做更进一步的描述。
62.参照图1所示,在一个优选实施例中,所述浮式运输机器人3包括若干个浮力球6。所述浮力球6焊接或通过螺钉连接固定设于机器人框架杆上,用于为浮式运输机器人3提供浮力。
63.参照图1所示,在一个优选实施例中,所述浮式运输机器人3还包括控制天线7。所述控制天线7焊接或通过螺钉固定于机器人框架杆上。所述控制天线7通过电缆与主控单元连接,用于为浮式运输机器人3提供信号通讯。
64.参照图1所示,在另一个优选实施例中,所述浮式运输机器人3还包括镂空柔性垃圾袋,所述镂空柔性垃圾袋设于垃圾筐内。通过直接更换镂空柔性垃圾袋可达到快速清除垃圾筐内浮式垃圾的效果。
65.下面详述本发明的实现海漂垃圾捕获和运输的水上机器人的工作流程。
66.参照图1~图11所示,位于浮式栅栏2上的能量捕获单元4通过太阳能电板42和风力发电机46收集海上的风能和太阳能并将收集的能量通过海洋专用电缆存储于储能单元1内。然后主控单元控制储能单元给航行提示灯45和位于储能单元1之中的浮式运输机器人3提供电能。在垃圾收集阶段,靠近岸边的海漂垃圾被v型排列的浮式栅栏2拦截。在沿岸流、潮汐和波浪的作用下被浮式栅栏2捕获的海漂垃圾向v型排列的浮式栅栏2的中间运动。此时,集结在浮式栅栏2周围的海漂垃圾在波浪作用下进入储能单元1并通过越浪式单向门37单向进入浮式运输机器人3内,从而实现海漂垃圾捕获。在捕获海漂垃圾的同时,储能单元1通过将充电卡座183卡设在固定钩38内可实现浮式运输机器人3的充电。
67.当浮式运输机器人3的垃圾筐内的垃圾收集满后,主控单元控制储能单元1对电磁铁184通电以使电磁铁184产生磁力并将充电卡座183吸起,进而使得充电卡座183与浮式运输机器人3分离。然后主控单元控制浮式运输机器人3启动并离开储能单元1以将收集的海漂垃圾运输到岸边的指定地点。在浮式运输机器人3离开的同时,垃圾挡板15放下从而将储能单元1内的海漂垃圾挡住。浮式运输机器人3在主控单元的控制下将海漂垃圾运输到指定地点后返回并靠近储能单元1。在储能单元引导板36和充电卡座引导杆182的作用下浮式运输机器人3顺利顶开充电卡座183和垃圾挡板15进入储能单元1,并通过将充电卡座183卡设在固定钩38上使其固定于储能单元1内开始下一循环的海漂垃圾收集以及能量补给。
68.以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的
技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1