施工机械的控制方法与流程
施工机械的控制方法
1.本发明是申请号为201611028237.6、发明名称为“施工机械的控制方法”、申请日为2016年11月18日的发明申请的分案申请。
技术领域
2.本发明属于一种施工机械的控制方法,具体涉及一种施工机械的控制方法用于稳定地维持附属装置姿势。
背景技术:
3.施工机械,例如挖掘机,通过驱动可旋转连接的动臂、机械臂、以及附属装置可以执行多种工作。此时,所述附属装置可以根据工作种类来选择。例如,铲斗可以执行挖掘工作,破碎机可以执行破碎工作,叉可以执行搬运工作。
4.但是,所述附属装置的活动不仅是针对所述附属装置的操作,还由组合针对所述动臂以及所述机械臂的活动的结果所体现。因此,对于非熟练者而言有时不能如愿地控制所述附属装置。特别是在使用叉附属装置时,因没能维持附属装置的水平有可能使装载物掉落,由此有产生安全事故的顾虑。
技术实现要素:
5.为实现上述本发明的课题,本发明提供了一种根据示例性实施例的施工机械的控制方法,用于检测包括附属装置的工作装置初始位置。接收针对所述工作装置的操作信号的步骤。利用所述初始位置以及所述操作信号生成针对所述附属装置的假想移动轨迹。然后,将所述附属装置沿所述移动轨迹移动,控制主控制阀包括的阀芯活动以使所述附属装置一直维持所述初始位置的入射角。
6.根据示例性实施例,检测所述初始位置的步骤可以包括:利用设置在所述工作装置的惯性测量装置(inertia measurement unit,imu)检测所述工作装置位置的步骤。
7.根据示例性实施例,接收所述操作信号的步骤可以包括:从第一操纵杆接收针对地面垂直方向的第一操作信号的步骤;以及从第二操纵杆接收针对地面水平方向的第二操作信号的步骤。
8.根据示例性实施例,生成针对所述附属装置的假想移动轨迹的步骤包括:从所述接收的第一操作信号确定所述附属装置针对地面垂直方向的移动速度的步骤;以及从所述接收的第二操作信号确定所述附属装置针对地面水平方向的移动速度的步骤。
9.根据示例性实施例,所述第一操纵杆是用于控制动臂动作的动臂操纵杆,所述第二操纵杆可以是用于控制机械臂动作的机械臂操纵杆。
10.根据示例性实施例,控制所述阀芯活动的步骤可以包括:利用逆运动学(inversekinematics)算出包括在从所述附属装置末端部位置到所述工作装置的动臂、机械臂、以及所述附属装置的角度的步骤。
11.根据示例性实施例,控制所述阀芯活动的步骤可以包括:向用于对所述阀芯供应
先导信号压的控制阀施加电动控制信号的步骤。
12.根据示例性实施例,所述控制阀可以是电子比例减压阀(electronicproportional pressure reducing,eppr)。
13.根据示例性实施例,所述施工机械的控制方法还可以包括:通过反馈(feed
‑
back)控制再算出所述动臂、所述机械臂、以及所述附属装置的角度的步骤。
14.根据示例性实施例,所述反馈控制可以是比例积分微分(proportional integralderivative,pid)控制。
15.根据示例性实施例,所述附属装置可以包括叉或铲斗。
16.根据示例性实施例的施工机械的控制方法可以控制附属装置使其维持预定入射角移动。因此,非熟练人员同样可以维持附属装置、特别是叉附属装置的预定入射角,由此可以防止因装载物掉落而引发的安全事故。而且,与叉车相比安装叉附属装置的挖掘机的工作半径大很多,因此可以达成提升工作效率以及工作用途多种化的效果。
17.但是,本发明的效果不以上述言及的效果所限定,在不脱离本发明的思想以及领域范围内,可以以多种形态扩张。
附图说明
18.图1是施工机械的侧面示意图。
19.图2是根据示例性实施例的施工机械的控制系统的模块示意图。
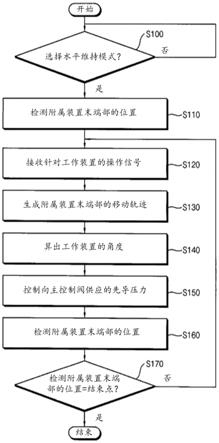
20.图3是利用图2的控制系统控制施工机械的方法流程示意图。
21.图4至图6是根据驾驶人操作的附属装置活动的示意图。
22.附图标记说明
23.10:施工机械 20:上部旋转体
24.30:下部行驶体 40:驾驶腔室
25.50:工作装置 60:动臂
26.62:动臂油缸 70:机械臂
27.72:机械臂油缸 80:附属装置
28.82:附属装置油缸 100:操作装置
29.102:第一操纵杆 104:第二操纵杆
30.110:检测装置 112:第一传感器
31.114:第二传感器 116:第三传感器
32.120:控制装置 122:接收部
33.124:轨迹生成部 126:精细算出部
34.128:控制信号输出部 130:控制阀
35.140:主控制阀 c:移动轨迹
36.e1:起始点 e2:结束点
37.θ1:第一角度 θ2:第二角度
38.θ1:第一角度 θ2:第二角度
具体实施方式
39.对于本文公开的本发明的实施例,特定的结构或功能性说明仅仅用于说明本发明的实施例,本发明的实施例可以以多种形态实施并且并不限定于本文说明的实施例。
40.本发明可以有多种变化并可以具有多种形态,将特定的实施例示例在示意图并详细地在本文说明。但该实施例不被本发明特定的公开形态限定,并且包括本发明的思想以及技术范围包括的所有变化,等同物以及代替物。
41.第一,第二等用语可以在说明多种构成要素时使用,但所述构成要素不被所述用语限定。使用所述用语的目的可以在于区别一个构成要素与另一个构成要素。例如,在不脱离本发明的权利要求的范围下,第一构成要素可以命名为第二构成要素,类似的第二构成要素可以命名为第一构成要素。
42.在提到一个构成要素
‘
连接’或
‘
衔接’在另一构成要素时,有可能与那个另一构成要素直接连接或链接,但中间同样有可能存在其他的构成要素。相反地,提到一个构成要素
‘
直接连接’或
‘
直接衔接’时,中间不存在其他构成要素。说明构成要素之间关系的其他表达,即
‘…
之间’和
‘
就在
…
之间’或
‘…
相邻’和
‘…
直接相邻’同样跟上述情况相同。
43.在本技术使用的用语仅仅用于说明特定实施例而使用的,没有限定本发明的意图。除上下文明确地表示不同之外,单数的表达包括复数。在本技术,
‘
包括’或
‘
具有’等用语用于指定设计的特征、数字、步骤、动作、构成要素、部件或其组合物的存在,而不是提前排除一个或一个以上的其他特征或数字、步骤、动作、构成要素、部件或其组合物的存在或其他附加的可能性。
44.没有另行定义时,包括技术性或科学性用语,在这里使用的所有用语与本发明技术领域的普通技术人员通常理解的用语具有相同含义。通常的使用的,像在字典定义的用语与关联技术的上下文具有的含义一致,除本技术明确定义外,不被诠释成异常或过度的形式的含义。
45.以下,参照附图,详细地说明本发明的实施例。对示意图的相同的构成要素使用相同的附图标记,对相同的构成要素省略重复的说明。
46.图1是施工机械的侧面图。
47.参照图1,施工机械10可以包括上部旋转体20、下部行驶体30、驾驶腔室40、以及工作装置50。例如,所述施工机械可以是挖掘机。
48.将上部旋转体20搭载在下部行驶体30上,在与地面平行的平面上进行旋转以设定工作方向,并且可以通过驱动工作装置50来执行工作。此时,利用安装在上部旋转体20后方的平衡器可以维持工作中施工机械10的平衡。
49.下部行驶体30支撑上部旋转体20以及驾驶腔室40,利用在发动机产生的动力可以使施工机械10行驶。虽然在图1中图示的下部行驶体30是履带类型的,但是下部行驶体30形态并不限定于此。例如,所述下部行驶体可以具有车轮类型的形态。
50.驾驶腔室40设置在上部旋转体20,并且搭载在内部的驾驶人可以操纵施工机械10。驾驶腔室40内部可以具备用于操纵上部旋转体20、下部行驶体30、以及工作装置50的各种操纵装置。
51.工作装置50安装在上部旋转体20并且面向前方,可以执行挖掘、破碎等多种工作。工作装置50可以包括动臂60、机械臂70、附属装置80、以及用于驱动他们的油压油缸(动臂
油缸62,机械臂油缸72,附属装置油缸82)。
52.动臂60以可旋转贴附在上部旋转体20,并且可以通过动臂油缸62的驱动上升或下降。机械臂70以可旋转连接在动臂60的一端部,并且通过驱动机械臂油缸72可以执行外翻或内钩动作。附属装置80以可旋转连接在机械臂70的下端部,并且通过驱动附属装置油缸82可以执行外翻或内钩动作。图1中附属装置80被图示为叉(fork),但不以此限定。例如,所述附属装置可以是铲斗。
53.如图1所示,工作装置50通过工作人操作从第一位置移动到第二位置。此时,所述第一位置是附属装置80的末端部位于起始点e1的情况,其在图1以实线表示;所述第二位置是附属装置80的末端部位于结束点e2的情况,其在图1以虚线表示。在起始点e1附属装置80的入射角是第一角度θ1,在结束点附属装置80的入射角可以是第二角度θ2。此时,所述入射角是在附属装置80前进或后退时产生的角度,可以定义为从附属装置80和机械臂70的连接部向附属装置末端部延长的直线与地面垂直方向产生的角度。
54.图2是根据示例性实施例的施工机械的控制系统的模块示意图。
55.参照图1以及图2,施工机械的控制系统可以包括:用于产生针对工作装置50的操作信号的操作信号100;用于测量工作装置50位置的检测装置110;利用所述操作信号以及所述位置信息确定附属装置80的移动轨迹,以此生成控制工作装置50活动的控制信号的控制装置120;接收所述控制信号以此产生与其对应的先导信号压的控制阀130;以及根据所述先导信号压大小控制向工作装置50提供工作油量的主控制阀140(main control valve,简称为mcv)。
56.操作装置100设置在驾驶腔室40内部,并且通过驾驶人操作程度可以产生驱动工作装置50的操作信号。例如,所述操作装置可以是操纵杆。操作装置100产生的所述操作信号可以输入至控制装置120的接收部122。
57.根据示例性实施例,操作装置100可以包括用于产生针对动臂60的操作信号的第一操纵杆102以及用于产生针对机械臂70的操作信号的第二操纵杆104。驾驶人通过操作第一操纵杆102可以将动臂60上升或下降,通过操作第二操纵杆104可以将机械臂70外翻或内钩。此时,第一操纵杆102以及第二操纵杆104可以产生与驾驶人操作量对应的操作信号。例如,所述第一操纵杆可以产生与驾驶人操作量对应的动臂60移动信号,所述第二操纵杆可以产生与驾驶人操作量对应的机械臂70移动信号。
58.另外,当通过将要后述的选择开关选择水平维持模式时,第一操纵杆102以及第二操纵杆104可以分别产生与驾驶人操作量对应的、与附属装置80的垂直方向以及水平方向的移动量相关的操作信号。例如,选择所述水平维持模式状态时,通过驾驶人对第一操纵杆102的操作程度可以确定针对附属装置80的地面垂直方向的移动量,通过驾驶人对第二操纵杆104的操作程度可以确定针对附属装置80的地面水平方向的移动量。由此,第一操纵杆102以及第二操纵杆104可以分别只产生有关附属装置80垂直方向以及水平方向移动量的操作信号。
59.检测装置110设置在工作装置50,并且可以检测工作装置50的位置、角度等信息。例如,所述检测装置可以是惯性测量装置(inertia measurement unit,简称为imu)。所述惯性测量装置可以包括用于检测直线运动的三个加速度仪以及用于检测旋转运动的三个角速度仪,并且可以测量工作装置50的运动方向、姿势、以及位置、速度等。检测装置110设
置在工作装置50,由此检测装置110可以检测针对工作装置50的位置、角度等相关信息。
60.根据示例性实施例,检测装置110可以包括分别设置在动臂60、机械臂70、以及附属装置80的第一传感器112、第二传感器114、第三传感器116。第一传感器112可以检测动臂60的位置以及角度,第二传感器114可以检测机械臂70的位置以及角度,第三传感器116可以检测附属装置80位置以及角度。此时,从第三传感器116检测的信息可以包括针对附属装置末端部的位置以及入射角的相关信息。控制装置120利用从第一传感器112、第二传感器114、第三传感器116测量的信息可以掌握分别动臂60、机械臂70、以及附属装置80的准确位置。
61.所述获取的详细信息通过无线通信,例如,控制器局域网(controller areanetwork,简称为can)、本地内联网(local interconnect network,简称为lin)、flexray等无线通信可以发送到控制装置120。不同于此,检测装置110通过有线可以直接与控制装置120连接。
62.控制装置120从操作装置100以及检测装置110分别接收操作信号以及位置信息,利用此信息可以确定附属装置末端部的移动轨迹并且可以确定工作装置50的各部分的角度以使附属装置80维持预定入射角。此时,维持所述入射角可以是驱动工作装置50中装载在附属装置80的货物不掉落的充分条件。例如,重新参照图1,附属装置80的末端部从起始点e1到结束点e2沿移动轨迹c移动过程中可以维持附属装置80的预定入射角。即,第一角度θ1可以具有与第二角度θ2相同的大小。
63.根据示例性实施例,控制装置120可以包括接收部122、轨迹生成部124、精细算出部126、以及控制信号输出部128。
64.接收部122从操作装置100接收驾驶人的操作信号,从检测装置110接收针对工作装置50的位置信息。
65.轨迹生成部124利用通过接收部122接收的操作信号以及位置信息可以生成用于附属装置80维持预定入射角并移动的移动轨迹c。
66.具体而言,轨迹生成部124将从检测装置110接收的初期附属装置末端部位置可以设定为所述移动轨迹起始点e1。然后,从操作装置100接收的所述操作信号预测附属装置末端部的运动方向以及速度等,以此可以设定假想的结束点e2。例如,通过从所述第一操纵杆接收的操作信号可以预测所述附属装置针对地面垂直方向的移动量,通过从所述第二操纵杆接收的操作信号可以预测所述附属装置在地面水平方向的移动量。通过组合所述垂直方向以及所述水平方向的移动量可以设定所述结束点。针对所述附属装置末端部的移动轨迹c可以是连接所述起始点e1与所述结束点e2的假想线路。
67.而且,通过所述预测的移动量可以确定附属装置80的移动速度。例如,随着对第一操纵杆102的操作量变大可以增加附属装置80在所述垂直方向的移动速度,随着对第二操纵杆104的操作量变大可以增加附属装置80在所述水平方向的移动速度。
68.精细算出部126可以算出附属装置80的末端部沿着从轨迹生成部124生成的所述移动轨迹c移动的过程,用于维持附属装置80预定入射角的工作装置50的角度。例如,所述精细算出部利用逆运动学(inverse kinematics)可以算出从所述附属装置80的末端部到所述动臂、所述机械臂、以及所述附属装置的角度。
69.控制信号输出部128可以输出用于体现从精细算出部126算出的工作装置50角度
的控制信号。所述控制信号输入至控制阀130,以此可以控制从控制阀130输入到主控制阀140的先导信号压大小。即,在操作装置100产生的操作信号在经由控制装置120过程中被修正,所述修正的操作信号可以输入到控制阀130。
70.控制阀130可以从先导泵(未图示)接收控制油供应,以产生用于移动主控制阀140阀芯的先导信号压。例如,所述控制阀可以是电子比例减压阀(electronic proportionalpressure reducing,简称为eppr)。所述电子比例减压阀可以产生与从控制信号输出部128接收的控制信号大小成比例的先导信号压。根据所述先导信号压大小可以确定所述阀芯的移动量,由此可以确定向油压油缸(动臂油缸62,机械臂油缸72,附属装置油缸82)供应的工作油量。
71.根据示例性实施例,控制阀130可以包括向所述阀芯供应先导信号压的多个电子比例减压阀。例如,所述控制阀130可以包括向动臂阀芯(未图示)供应的先导信号压的第一电子比例减压阀以及第二电子比例减压阀、向机械臂阀芯(未图示)供应的先导信号压的第三电子比例减压阀以及第四电子比例减压阀、以及向附属装置阀芯(未图示)供应的先导信号压的第五电子比例减压阀以及第六电子比例减压阀。所述第一电子比例减压阀可以产生用于上升动臂60的先导信号压,所述第二电子比例减压阀可以产生用于下降动臂60的先导信号压。所述第三电子比例减压阀以及所述第五电子比例减压阀分别可以产生用于外翻机械臂70以及附属装置80的先导信号压,所述第四电子比例减压阀以及所述第六电子比例减压阀分别可以产生用于内钩机械臂70以及附属装置80的先导信号压。
72.主控制阀140利用设置在内部的多个所述阀芯可以控制向所述油压油缸(动臂油缸62,机械臂油缸72,附属装置油缸82)供应的工作油。例如,根据动臂阀芯移动方向可以仅向选自动臂油缸62上升侧腔室与下降侧腔室中的一个腔室供应工作油,根据所述动臂阀芯移动程度可以确定向动臂油缸62供应的工作油量。
73.此时,通过从控制阀130供应的先导信号压方向以及大小可以确定所述阀芯的移动方向以及移动程度。而且,通过从控制信号输出部128接收的控制信号可以确定在所述控制阀130产生的先导信号压方向以及大小。结果,由控制装置120控制油压油缸(动臂油缸62,机械臂油缸72,附属装置油缸82)的活动,附属装置80可以被控制成维持预定入射角的状态沿所述移动轨迹c移动。
74.根据示例性实施例,所述施工机械的控制系统还可以包括用于确定是否使用所述控制系统的选择开关(未图示)。例如,所述选择开关可以是设置在驾驶腔室40内部的导通截止(on
‑
off)开关。驾驶人将所述选择开关导通,所述施工机械控制系统将被激活并且如上述可以控制工作装置50的移动。即,附属装置80以维持预定入射角的状态沿所述移动轨迹c移动。不同于此,驾驶人将所述选择开关截止,所述施工机械控制系统将不被激活并且可以根据驾驶人操作来驱动工作装置50。此时,根据驾驶人的能力有可能不能维持预定的附属装置80入射角。
75.如上述,根据示例性实施例的施工机械控制系统可以控制附属装置,使其维持预定入射角来移动。由此,非熟练人员同样可以维持附属装置、特别是叉附属装置的入射角,从而可以防止因装载物掉落而导致的安全事故。而且,装载叉附属装置的挖掘机与叉车相比工作半径大很多,因此可以实现提升工作效率以及工作用途多样化的效果。
76.图3是利用图2的控制系统控制施工机械方法的流程示意图。图4至图6是根据驾驶
人的操作移动的附属装置活动示意图。
77.参照图3,步骤s100,判断是否选择水平维持模式。
78.例如,驾驶人利用设置在驾驶腔室40内部的选择开关可以确定是否使用水平维持模式。当没有选择水平维持模式时,控制阀130可以产生与驾驶人操作信号对应的先导信号压。由此,工作装置50的各油压油缸(动臂油缸62,机械臂油缸72,附属装置油缸82)可以供应有与所述操作信号对应的量的工作油。不同于此,当选择水平维持模式时,所述操作信号由控制装置120加工并且可以向控制阀130提供以使附属装置80可以维持水平。
79.当选择水平维持模式时,步骤s110,检测附属装置末端部的位置;步骤s120,接收驾驶人的操作信号。
80.控制装置120的接收部122从检测装置110可以接收针对工作装置50的位置信息。具体而言,分别设置在动臂60、机械臂70、以及附属装置80的第一传感器112、第二传感器114、第三传感器116可以检测动臂60、机械臂70、以及附属装置80的位置、角度、运动方向、速度等相关信息。特别地,是附属装置80时可以包括附属装置末端部的位置以及入射角的相关信息。例如第一传感器112、第二传感器114、第三传感器116可以是惯性测量装置(imu)。所述检测的信息通过无线通信可以输入至接收部122。
81.另外,驾驶人的操作信号可以从操作装置100产生。例如,所述操作装置可以是操纵杆。驾驶人操作所述操纵杆,所述操纵杆可以产生与驾驶人操作量对应的操作信息。所述产生的操作信号可以输入至控制装置120的接收部122。
82.根据示例性实施例,操作装置100可以包括用于产生针对动臂60的操作信号的第一操纵杆102以及用于产生针对机械臂70的操作信号的第二操纵杆104。当没有选择水平维持模式时,驾驶人通过操作第一操纵杆102可以上升或下降动臂60,通过操作第二操纵杆104可以外翻或内钩机械臂70。
83.另外,当选择水平维持模式时,可以与操纵杆(第一操纵杆102,第二操纵杆104)操作量对应地分别产生针对附属装置80的垂直方向以及水平方向的操作信号。例如,第一操纵杆102可以与驾驶人操作量对应地产生针对地面垂直方向的操作信号,第二操纵杆104可以与驾驶人操作量对应地产生针对地面水平方向的操作信号。所述产生的操作信号可以分别输入至控制装置120的接收部122。
84.步骤s130,生成针对所述附属装置末端部的移动轨迹。
85.轨迹生成部124将初始的附属装置末端部位置设定为轨迹的起始点e1,从所述操作信号预测附属装置末端部的运动方向以及速度等,由此可以设定假想的结束点e2。例如,从针对第一操纵杆102的操作信号可以预测与地面垂直方向的移动量,从针对第二操纵杆104的操作信号可以预测与地面水平方向的移动量。通过所述移动量的组合可以设定所述结束点e2。针对所述附属装置末端部的移动轨迹c可以是连接所述起始点e1与所述结束点e2的假想线路。
86.而且,根据所述预测的移动量同样可以确定附属装置80的移动速度。例如,随着针对第一操纵杆102的操作量α变大可以增加附属装置80的所述垂直方向移动速度,随着针对第二操纵杆104的操作量β变大可以增加附属装置80的所述水平方向移动速度。
87.在图4至图6详细地图示了通过驾驶人操作的附属装置80的活动。
88.参照图4,在选择水平维持模式的状态驾驶人只操作第一操纵杆102,可以将针对
所述附属装置末端部的移动轨迹c设定为与地面垂直的方向。此时,根据针对第一操纵杆102的操作量α可以确定所述结束点e2的位置以及附属装置80的垂直方向移动速度。例如,随着相对于所述第一操纵杆操作量α变大可以增加附属装置80的所述垂直方向移动速度。
89.参照图5,在选择水平维持模式的状态驾驶人只操作第二操纵杆104,可以将针对所述附属装置末端部的移动轨迹c设定为与地面水平的方向。此时,根据针对第二操纵杆104的操作量β可以确定所述结束点e2的位置以及附属装置80的水平方向移动速度。例如,随着相对于所述第二操纵杆操作量β变大可以增加附属装置80的所述水平方向移动速度。
90.参照图6,在选择水平维持模式的状态驾驶人同时操作第一操纵杆102以及第二操纵杆104,可以将针对所述附属装置末端部的移动轨迹c设定为相对于地面倾斜预定角度的方向。即,通过第一操纵杆102的操作量α以及第二操纵杆104的操作量β的组合可以确定所述结束点e2的位置。而且,通过第一操纵杆102的操作量α可以确定附属装置80的垂直方向移动速度,通过第二操纵杆104的操作量β可以确定附属装置80的水平方向移动速度。
91.步骤s140,算出用于维持所述附属装置预定入射角的工作装置50的角度。
92.由轨迹生成部124产生针对所述附属装置末端部的移动轨迹c,精细算出部126利用逆运动学(inverse kinematics)可以算出用于满足所述移动轨迹c的动臂60、机械臂70、以及附属装置80的角度。
93.然后,步骤s150,控制信号输出部128可以输出用于使动臂60、机械臂70、以及附属装置80维持所述算出的角度的控制信号。所述控制信号输入至控制阀130并可以产生与其相应大小的先导信号压。所述先导信号压可以移动主控制阀140的阀芯,动臂油缸62、机械臂油缸72、以及附属装置油缸82可以被供应与所述控制信号相应量的工作油。由此,附属装置80可以以维持预定入射角状态沿所述移动轨迹c移动。
94.根据示例性实施例,所述施工机械的控制方法通过反馈(feed
‑
back)控制可以提高准确性以及稳定性。具体地,步骤s160,工作装置50在沿所述移动轨迹c移动过程中,接收部122可以持续接收针对工作装置50的位置信息。轨迹生成部124将当前的附属装置末端部位置设定为新起始点,以此为基础可以生成新移动轨迹。精细算出部126算出用于满足所述新移动轨迹的工作装置50的角度,控制信号输出部128同样针对所述新移动轨迹可以修正针对控制阀130的控制信号。例如,所述反馈控制可以是比例积分微分控制(proportionalintegral derivative control,简称为pid控制)。
95.步骤s170,当附属装置末端部当前位置与所述结束点e2一致时结束所述水平维持模式。
96.不同于此,当附属装置末端部没有达到所述结束点e2时可以反映驾驶人的意图以结束所述水平维持模式。例如,驾驶人将驾驶腔室40内部的所述选择开关未激活,或操作了附属装置80时同样可以结束所述水平维持模式。
97.如上述所述,根据示例性实施例的施工机械控制系统可以控制附属装置,使其维持预定入射角来移动。由此,非熟练人员同样可以维持附属装置、特别是叉附属装置的入射角,从而可以防止由装载物掉落而导致的安全事故。而且,装载叉附属装置的挖掘机与叉车相比工作半径大很多,因此可以达成提升工作效率以及工作用途多样化的效果。
98.以上实施例用以说明本发明的技术方案,但本领域的普通技术人员应当理解在不脱离记载在本发明权利要求书的思想以及领域范围内,本发明可以进行多种修正以及变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1