一种水面自动收油系统及方法与流程
1.本发明涉及石油回收领域,具体是涉及一种水面自动收油系统以及方法。
背景技术:
2.近年来,随着海洋油气资源的不断开发,海底管网规模将会日益增大,对海洋生态环境存在潜在风险,一旦发生管线穿孔、意外事故、人为破坏等造成原油泄漏,不仅会造成巨大的经济损失,还可能引发国际纠纷。更为严重的是,泄漏的原油漂浮在海洋或其他水域中,将严重破坏海洋、海岸及其它水域环境,造成难以修复的生态破坏。而国内外海洋平台和海底管线就曾多次发生重大安全试过,带来了巨大的经济损失,并造成了严重的海洋生态环境污染。例如,在2010年发生墨西哥湾的原油泄漏事故,由于当时缺乏专业的集油装置,从而造成了大量的原油泄漏到海洋内,致使海洋内大量的生物死亡,严重破坏了海洋生物链,给国家造成了巨大的经济损失。海上石油泄漏事故发生后需要通过有效的回收装置将泄漏的石油尽可能的回收,从而将事故损失及负面影响降至最低。现有的海上石油回收办法通常有:应用人工放置围油栏等海上漂浮装置把浮油包围起来,防止其进一步的扩散,并用船舶借助网进行回收,收集后仍然会剩余一部分无法回收的呈薄膜的石油或分散在水中的石油乳化物,通常会使用化学试剂或者微生物分解的方式进行处理,但化学方法可能造成二次污染,而生物降解则作业条件苛刻、处理周期长。以上方法都需要花费大量的人力物力,并且效率较低,存在着局限性。同时泄漏的石油都难以做到较高的回收再利用率。因此现需一种水上收油机。
3.中国专利cn201910403698.4公开了一种海上原油泄漏处理设备,包括船体,所述船体内设有储存泄漏原油的储油腔,所述储油腔右壁内设有将原油与水分离的分离腔,所述分离腔内设有搅拌装置,所述分离腔右壁内设有伸缩腔,所述伸缩腔内可滑动的设有伸缩块。
4.该处理设备通过储油腔储备收集的原油,容量有限,且在储油腔盈满时,该处理设备需再讲储油腔内的原油排放至指定地点,较为繁琐。
技术实现要素:
5.为解决上述技术问题,本技术提供一种水上收油系统,能够实现将水面上的油自动收集到油桶,并将装满油的油桶自动放置到工作站。
6.一种水面自动收油系统,包括:
7.工作站,所述工作站能够放置多个集油桶;
8.水上机器人,包括:
9.装载台,所述装载台能够承载一个所述集油桶,所述水上机器人能够带着集油桶在水上移动并能够将收集到的油送入到所述集油桶中;
10.收油机构,用于收集漂浮在水面上的油污,设置在装载台的前端;
11.第一对接件,同轴设置在所述装载台上,且第一对接件与收油机构的出油端连通,
在所述集油桶的一端开口处设置有第二对接件,所述第一对接件与第二对接件能够可拆卸地对接并在对接后实现集油桶与收油机构的连通。
12.优选地,所述水上收油机还包括有油量监测机构,所述油量监测机构包括:
13.三通管,其两连通口分别与收油机构的出油口和第一对接件连通;
14.直角管,其一端口与三通管的另一连通口连通,且直角管的另一端口沿竖直方向延伸并高于装载台上集油桶的顶部;
15.液位计,同轴设置在直角管的远离三通管的一端处,用于对直角管内的液位进行检测;
16.第一自动通气阀,沿径向设置在直角管的远离三角管的一端处,用于在油污进入到直角管内时,直角管内的空气能够通过第一自动通气阀跑出,或者在油污液位下降时,外部的空气能够通过第一自动通气阀进入到直角管中;
17.电磁阀,三通管通过电磁阀与收油机构的出油口连通。
18.优选地,第一对接件包括可上下移动地设置在装载台上的抵接管,抵接管轴线竖向设置,且抵接管的顶端高于装载台的上表面,且抵接管的底端与所述三通管的一个开口连通,抵接管的靠近顶部的位置处设置有沿径向贯穿的出油口,所述抵接管的靠近底部的位置处设置有沿径向贯穿的进油口,当第一对接件与第二对接件对接时,所述出油口能够插入到集油桶内,所述进油口能够与所述三通管连通。
19.优选地,所述第二对接件包括:
20.固定筒,设置在集油桶的底部的上表面,固定筒的轴线与所述集油桶的轴线共线,其两端开口,并且在固定筒的顶端设置有限位环,所述限位环的内径小于固定筒的内径;
21.密封筒,设置在固定筒内且与所述固定筒同轴,且密封筒的顶端抵靠在所述限位环的下表面,密封筒内设置有安置腔,密封筒的内径大于抵接管的外径且小于限位环的内径;
22.固定销,具有多个,相对于所述密封筒的轴线等角度地设置,所述固定销的下端位于所述安置腔内,上端穿过密封筒的上端,并且多个固定销所围成的圆的直径小于限位环的内径,多个固定销相对所述密封筒能够上下移动;
23.活动板,与密封筒同轴设置,固定在固定销的顶端,活动板的直径小于限位环的内径且大于密封筒的内径,所述活动板能够选择性地抵靠在所述密封筒的上表面;
24.第一弹簧,套设在固定销的位于安置腔内的部分上,第一弹簧的下端抵靠在所述固定销的下端,上端抵靠在安置腔的顶壁的下表面上,所述第一弹簧始终处于被压缩的状态。
25.优选地,第一对接件还包括:
26.安置筒,设置在三通管的一开口处,所述安置筒的轴线竖向设置,安置筒内自下而上依次形成有第一腔体和第二腔体,第一腔体和第二腔体之间设置有隔板,所述安装筒与抵接管同轴设置,且所述抵接管贯穿第一腔体和第二腔体并与相对所述安置筒能够上下移动,第一腔体与所述三通管连通;
27.挡板,设置在抵接管的下端面,所述挡板能够抵靠在所述隔板的下表面,且当挡板抵靠在所述隔板上时,所述进油口与所述第二腔体连通。
28.优选地,所述第一抵接件还包括:
29.抵接圈,所述抵接圈同轴设置在所述抵接管的外圆周面上,所述抵接圈相对所述抵接管在上下方向不能够相对移动,所述抵接圈位于所述安置筒的正上方;
30.第二弹簧,套设在抵接管上,且第二弹簧的下端抵靠在所安置筒的上表面,上端抵靠在所述抵接圈的下表面,所述第二弹簧始终处于被压缩的状态。
31.优选地,所述收油机构包括:
32.工作箱,设置在装载台的前端的上表面,且工作箱内靠后的一侧设置有收油腔,收油腔的前侧且靠上的位置形成有进料槽;
33.同步带输送机,倾斜设置在装载台的前端,且同步带输送机的输送面上均匀布置有与其垂直的挂油软杆,且同步带输送机的前端低于水面,同步带输送机的后端搭接在进料槽上;
34.抽油泵,设置在装载台上,且抽油泵的输入口与收油腔内底端连通,抽油泵的输出口与所述三通管的一开口连通。
35.优选地,所述水上机器人还包括三爪稳固器,所述三爪稳固器包括:
36.抵接爪,抵接爪具有三个,所述抵接爪相对所述抵接管的轴线等角度的设置,且抵接爪铰接的所述装载台上;
37.第二电动推杆,第二电动推杆的一端与装载台铰接,第二电动推杆的另一端与抵接爪的下端铰接。
38.优选地,还包括有自动换桶机构,自动换桶机构包括有,
39.龙门架,设置在工作站上;
40.轨道移动组件,其输出端沿水平方向可移动地设置在龙门架的顶端;
41.升降组件,其设置在所述轨道移动组件的输出端上,其输出端可上下移动;
42.三爪液压夹爪,其设置在所述升降组件的输出端,且其夹持口竖直朝下。
43.本发明还提供了一种水面自动吸油方法,采用以上系统,具体包括如下步骤:
44.步骤一,控制水上机器人移动至工作站处,通过自动换桶机构将空的集油桶放置在装置台上;
45.步骤二,控制水上机器人驶离工作站,启动收油机构,水上机器人在油泄漏水域移动时收集泄漏的原油;
46.步骤三,当油量监测机构检测到装载台上的集油桶内原油装满时,控制水上机器人返回至工作站处;
47.步骤四,启动自动换桶系统将装载台上的已经装满原油的集油桶卸下,并将另一空的集油桶放置在装载台上;
48.步骤五,重复步骤二到步骤四。
49.本技术与现有技术相比具有的有益效果是:
50.本发明通过水上机器人、收油机构和集油桶实现了对泄漏石油的自动回收,而通过工作站、第一对接件和设置有集油桶的第二对接件,能够便于方便地更换集油桶,进而便于提高工作效率;本发明不仅适用于海面,还适用于江河湖库,同时不限原油,还适用于如柴油、机油等一切油类、漂浮类的危化品等。
附图说明
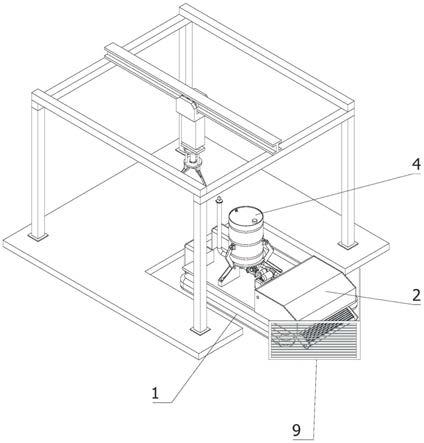
51.图1为本发明的立体图;
52.图2为本发明的俯视图;
53.图3为图2的a
‑
a截面处的剖视图;
54.图4为图2的a
‑
a截面处的立体剖视图;
55.图5为图3的b处局部放大图;
56.图6为本发明的水上机器人的俯视图;
57.图7为图6的c
‑
c截面处的剖视图;
58.图8为图7的d处局部放大图;
59.图9为图7的e处局部放大图;
60.图10为图6的f
‑
f截面处的剖视图;
61.图11为图10的g处局部放大图;
62.图12为本发明的水上机器人的立体图;
63.图13为本发明的工作站的立体图;
64.图14为图13的h处局部放大图;
65.图15为本发明的三爪液压夹爪的立体图。
66.图中标号为:
[0067]1‑
水上机器人;
[0068]2‑
收油机构;2a
‑
工作箱;2a1
‑
收油腔;2a2
‑
进料槽;2b
‑
同步带输送机;2b1
‑
挂油软杆;2c
‑
抽油泵;2d
‑
第一电动推杆;
[0069]3‑
第一对接件;3a
‑
抵接管;3a1
‑
出油口;3a2
‑
进油口;3b
‑
封堵环;3b1
‑
第三密封环;3c
‑
安置筒;3c1
‑
第一腔体;3c2
‑
第二腔体;3d
‑
限位圈;3e
‑
抵接圈;3f
‑
第二弹簧;3g
‑
防护筒;3h
‑
第四密封环;
[0070]4‑
集油桶;4a
‑
固定筒;4a1
‑
限位沿;4b
‑
第二自动换气阀;
[0071]5‑
第二对接件;5a
‑
密封筒;5a1
‑
安置腔;5b
‑
固定销;5c
‑
活动板;5d
‑
第一弹簧;5e
‑
第一密封环;5f
‑
第二密封环;
[0072]
6a
‑
三通管;6b
‑
直角管;6c
‑
液位计;6d
‑
第一自动通气阀;6e
‑
电磁阀;
[0073]
7a
‑
抵接爪;7b
‑
第二电动推杆;
‑
自动换桶机构;
[0074]
8a
‑
龙门架;8b
‑
轨道移动组件;8c
‑
升降组件;8d
‑
三爪液压夹爪;
[0075]9‑
拦污网。
具体实施方式
[0076]
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
[0077]
一种水面自动收油系统,包括工作站和水上机器人1,所述工作站能够放置多个集油桶4,所述水上机器人1具有装载台,所述装载台能够承载一个所述集油桶4,所述水上机器人1能够带着集油桶4在水上移动并能够将收集到的油送入到所述集油桶4中。
[0078]
所述水上机器人1包括:
[0079]
收油机构2,用于收集原油,设置在装载台的前端;
[0080]
第一对接件3,同轴设置在所述装载台上,且第一对接件3与收油机构2的出油端连通,在所述集油桶4的一端开口处设置有第二对接件5,所述第一对接件3与第二对接件5能够可拆卸地对接并在对接后实现集油桶4与收油机构的连通。
[0081]
具体的,水上机器人1在工作站处装载集油桶4,即在工作台处,将空的集油桶4同轴放置在装载台上,使第一对接件3和第二对接件5对接,收油机构2的出油口与装载台上的集油桶4连通,水上机器人1行驶在水面上,通过启动收油机构2对水面上泄漏的石油进行收集,进而将泄漏的石油回收至集油桶4中,当集油桶4内原油处于盈满状态下,水上机器人1返回至工作站处,将装满原油的集油桶4从装载台上卸下,并将另一空的集油桶4重新放置在装载台上。
[0082]
所述水上收油机还包括有油量监测机构,所述油量监测机构包括有,
[0083]
三通管6a,其两连通口分别与收油机构2的出油口和第一对接件3连通;
[0084]
直角管6b,其一端口与三通管6a的另一连通口连通,且直角管6b的另一端口沿竖直方向延伸并高于装载台上集油桶4的顶部;
[0085]
液位计6c,同轴设置在直角管6b的远离三通管6a的一端处,用于对直角管6b内的液位进行检测;
[0086]
第一自动通气阀6d,沿径向设置在直角管6b的远离三角管6a的一端处,用于在石油进入到直角管6b内时,直角管6b内的空气能够通过第一自动通气阀6d跑出,或者在石油液位下降时,外部的空气能够通过第一自动通气阀6d进入到直角管6b中。
[0087]
油量监测机构还包括有电磁阀6e,三通管6a通过电磁阀6e与收油机构2的出油口连通,通过控制电磁阀6e的导通和关闭能够控制直角管6b中前一次使用时进入的石油的流出。
[0088]
第一对接件3包括可上下移动地设置在装载台上的抵接管3a,抵接管3a轴线竖向设置,且抵接管3a的顶端高于装载台的上表面,且抵接管3a的底端与所述三通管6a的一个开口连通,抵接管3a的靠近顶部的位置处设置有沿径向贯穿的出油口3a1,所述抵接管3a的靠近底部的位置处设置有沿径向贯穿的进油口3a2,当第一对接件3与第二对接件5对接时,所述出油口3a1能够插入到集油桶4内,所述进油口3a2能够与所述三通管6a连通。
[0089]
所述第二对接件5包括:
[0090]
固定筒4a,设置在集油桶4的底部的上表面,固定筒4a的轴线与所述集油桶4的轴线共线,其两端开口,并且在固定筒4a的顶端设置有限位环4a1,所述限位环4a1的内径小于固定筒4a的内径;
[0091]
密封筒5a,设置在固定筒4a内且与所述固定筒4a同轴,且密封筒5a的顶端抵靠在所述限位环4a1的下表面,密封筒5a内设置有安置腔5a1,密封筒5a的内径大于抵接管3a的外径且小于限位环4a1的内径;
[0092]
固定销5b,具有多个,相对于所述密封筒5a的轴线等角度地设置,所述固定销5b的下端位于所述安置腔5a1内,上端穿过密封筒5a的上端,并且多个固定销5b所围成的圆的直径小于限位环4a1的内径,多个固定销5b相对所述密封筒5a能够上下移动;
[0093]
活动板5c,与密封筒5a同轴设置,固定在固定销5b的顶端,活动板5c的直径小于限位环4a1的内径且大于密封筒5a的内径,在需要进油时,抵接管3a能够将活动板5c顶起,当不需要进油时,活动板5c抵靠在密封筒5a的上端面;
[0094]
第一弹簧5d,套设在固定销5b的位于安置腔5a1内的部分上,第一弹簧5d的下端抵靠在所述固定销5b的下端,上端抵靠在安置腔5a1的顶壁的下表面上,所述第一弹簧5d始终处于被压缩的状态,当抵接管3a向上推抵所述活动板5c时,固定销5b向上移动,当抵接管3a向下移动时,在第一弹簧5d的作用下,所述活动板5c抵靠在所密封筒5a的上端面上,避免集油桶4内的油流出。
[0095]
所述第二对接件5还包括第一密封环5e,第一密封环5e设置在密封筒5a的上端面且与所述密封筒5a同轴设置,所述第一密封环5e与所述限位环4a1配合,部分第一密封环5e与所述活动板5c配合。
[0096]
第二对接件5还包括有第二密封环5f,第二密封环5f同轴设置在密封筒5a的上表面,且第二密封环5f的直径小于活动板5c的直径,当活动板5c受第一弹簧5d弹力影响而抵接在密封筒5a的顶端时,密封筒5a和活动板5c之间通过第二密封环5f能够紧密连接,进而防止集油桶4内的原油通过密封筒5a和活动板5c之间的间隙向外溢出,从而提高集油桶4的密封性。
[0097]
所述集油桶4的顶端还设置有第二自动换气阀4b,通过第二自动换气阀4b能够维持集油桶4内部压强,便于将石油注入到集油桶4内。
[0098]
密封筒5a的下端开口处呈锥面,第一对接件3还包括封堵环3b,封堵环3b同轴设置在抵接管3a的外圆周面上,所述封堵环3b的外圆周面形成有与密封筒5a上的锥面配合的锥面,当抵接管3a推抵所述活动板5c时,所述密封筒5a的锥面与所述封堵环3b的锥面配合,能够避免油从抵接管3a与密封筒5a之间的间隙流出。在封堵环3b的锥面上设置有第三密封环3b1。
[0099]
第一对接件3还包括:
[0100]
安置筒3c,设置在三通管6a的一开口处,所述安置筒3c的轴线竖向设置,安置筒3c内自下而上依次形成有第一腔体3c1和第二腔体3c2,第一腔体3c1和第二腔体3c2之间设置有隔板,所述安装筒3c与抵接管3a同轴设置,且所述抵接管3a贯穿第一腔体3c1和第二腔体3c2并与安置筒3c同轴滑动配合,第一腔体3c1与所述三通管6a连通;
[0101]
挡板3d,设置在抵接管3a的下端面,所述挡板3d能够抵靠在所述隔板的下表面,且当挡板3d抵靠在所述隔板上时,所述进油口3a2与所述第二腔体3c2连通,在所述第二腔体3c2内设置有用于将进油口3a2封堵的第四密封环3h,这样当不需要向集油桶4供油时,可以将进油口3a2封堵。
[0102]
所述第一抵接件3还包括:
[0103]
抵接圈3e,所述抵接圈3e同轴设置在所述抵接管3a的外圆周面上,所述抵接圈3e相对所述抵接管3a在上下方向不能够相对移动,所述抵接圈3e位于所述安置筒3c的正上方;
[0104]
第二弹簧3f,套设在抵接管3a上,且第二弹簧3f的下端抵靠在所安置筒3c的上表面,上端抵靠在所述抵接圈3e的下表面,所述第二弹簧3f始终处于被压缩的状态,这样当未受外力时,第二弹簧3f能够带着所述抵接管3a向上移动以使所述挡板3d抵靠在所述隔板上上,所述进油口3a2被第四密封圈3h封堵。
[0105]
优选地,第一对接件3还包括有防护筒3g,防护筒3g同轴设置在抵接圈3e的下表面,抵接圈3e与安置筒3c同轴滑动配合,且第二弹簧3f位于防护筒3g内,能够减少水侵蚀第
二弹簧3f。
[0106]
所述收油机构2包括:
[0107]
工作箱2a,设置在装载台的前端的上表面,且工作箱2a内靠后的一侧设置有收油腔2a1,收油腔2a1的前侧形成有进料槽2a2;
[0108]
同步带输送机2b,倾斜设置在装载台的前端,且同步带输送机2b的输送面上均匀布置有与其垂直的挂油软杆2b1,且同步带输送机2b的前端低于水面,同步带输送机2b的另一端搭接在进料槽2a2上;
[0109]
抽油泵2c,设置在装载台上,且抽油泵2c的输入口与收油腔2a1内底端连通,抽油泵2c的输出口与所述三通管6a的一开口连通。
[0110]
具体的,收集油时,启动同步带输送机2b,使其输送面转动,挂油软杆2b1能够附着油,且当挂油软杆2b1抵接在进料槽2a2的底端时,进料槽2a2的底端能够将挂油软杆2b1上附着的原油刮下,并使得原油流入到收油腔2a1中,通过抽油泵2c,能够将收油腔2a1中的原油抽出,并送入集油桶4中。
[0111]
优选地,同步带输送机2b的后端铰接在工作箱2a内,且收油机构2还包括有第一电动推杆2d,第一电动推杆2d的输出轴与同步带输送机2b的两侧铰接,且第一电动推杆2d另一端与工作箱2a的内部铰接,当需要调节同步带输送机2b低端伸入水底的高度时,启动第一电动推杆2d,使得同步带输送机2b的低端能够相对其铰接端能够上下摆动,使同步带输送机2b能够收集不同水面上不同厚度的油并且在不需要收油时,可以将同步带输送机2b脱离水面。
[0112]
所述机器人还包括三爪稳固器,三爪稳固器包括:
[0113]
抵接爪7a,抵接爪7a具有三个,所述抵接爪7a相对所述抵接管3a的轴线等角度的设置,且抵接爪7a铰接的所述装载台上;
[0114]
第二电动推杆7b,第二电动推杆7b的一端与装载台铰接,第二电动推杆7b的另一端与抵接爪7a的下端铰接。
[0115]
具体的,当集油桶4放置在转载台上时,启动第二电动推杆7b,使其输出轴带动抵接爪7a围绕铰接轴线转动,即三个抵接爪7a能够沿径向抵接在集油桶4的外圆周面上,从而使得集油桶4能够被稳定在装载台上,防止集油桶4发生倾倒现象。
[0116]
所述系统还包括有自动换桶机构,自动换桶机构包括有,
[0117]
龙门架8a,设置在工作站上;
[0118]
轨道移动组件8b,其输出端沿水平方向可移动地设置在龙门架8a的顶端;
[0119]
升降组件8c,其设置在所述轨道移动组件8b的输出端上,其输出端可上下移动;
[0120]
三爪液压夹爪8d,其设置在所述升降组件8c的输出端,且其夹持口竖直朝下。
[0121]
具体的,龙门架8a用于支撑安装轨道移动组件8b,水上机器人1在工作站处更换集油桶4时,启动轨道移动组件8b,使其输出端带动升降组件8c沿水平方向移动,当移动到位后,启动升降组件8c,使其输出端带动三爪液压夹爪8d沿竖直方向升降,当到位后,启动三爪液压夹爪8d,使其夹爪径向夹持集油桶4,从而实现更换集油桶4,提高工作效率。
[0122]
所述机器人还包括拦污网9,拦污网9沿竖直方向呈夹角状态设置在水上机器人1的前端,通过拦污网9能够拦截海面上漂浮的垃圾,防止垃圾一同被收油机构2收集,进而提高回收的原油的纯度。
[0123]
在所述机器人上还可以导航模块,能够根据设定的路线进行行驶,并且能够根据油污的区域制定吸油路线。并且在机器人上还可以设置一个或者多个障碍物检测传感器,所述机器人能够根据障碍物检测传感器检测到的数据避开障碍物。
[0124]
所述系统的收油方法如下:
[0125]
步骤一,控制水上机器人1移动至工作站处,通过自动换桶机构将空的集油桶4放置在装置台上;
[0126]
步骤二,控制水上机器人1驶离工作站,启动收油机构2,水上机器人1在油泄漏水域移动时收集泄漏的原油;
[0127]
步骤三,当油量监测机构检测到装载台上的集油桶4内原油装满时,控制水上机器人1返回至工作站处;
[0128]
步骤四,启动自动换桶系统将装载台上的已经装满原油的集油桶4卸下,并将另一空的集油桶4放置在装载台上;
[0129]
步骤五,重复步骤二到步骤四。
[0130]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1