冲水马桶以及安装在冲水马桶上的系统的制作方法
冲水马桶以及安装在冲水马桶上的系统
1.本技术是申请日为2017年7月7日、申请号为201780041860.1、国际申请号为pct/us2017/041214的名称为“自动将释放到马桶便池的水量调节成与便池内容物一致的系统、包括这种系统的马桶以及相关方法”的中国发明专利申请的分案申请。
2.相关申请的交叉引用
3.本技术要求2016年7月7日提交的美国临时专利申请no.62/359,696的优先权,该临时申请的全部内容通过引用并入本文。
背景技术:
4.由于诸多经济和环境原因,水资源保护正迅速成为个人消费者以及地方和国家政府的关注点。在冲水马桶占主导地位的地区的普通家庭中,马桶冲洗是唯一最高用水。普通人每天冲洗约五次。因此,马桶占家庭总用水量的约31%。
5.为了帮助管理用水量,开发了“双冲洗”马桶。双冲洗马桶为其使用者提供“小水量冲洗”选项(通常约2至4.5升)和“大水量”冲洗选项(通常约4至约9升)。所选择的选项取决于使用后马桶便池的内容物,其中液体废物的冲洗处理只需要使用“小水量”选项,而“大水量”选项可用于固体废物处理。如果使用得当,双冲洗马桶可以减少多达50%的水消耗。
6.然而,双冲洗马桶并不完美,因为“小”与“大”冲洗量的选择由使用者决定,他们经常忘记或变得困惑而在仅需要小冲洗水量的情形中无意中使用“大冲洗”水量。
7.一些现有技术试图通过开发能够检测马桶内容物并改变已经进行的冲洗的马桶便池来取消使用者的决定权。这些尝试主要着重于在便池的入口内或入口处使用红外线检测系统和/或检测允许可能推断便池的内容物的间接数据,例如,使用者对马桶的接近度、使用时间和/或“粪便气体”的有/无。
8.例如,2013年5月7日授权的名称为“dual flush electronic flush valve(双冲洗电子冲洗阀)”的美国专利no.8,434,172b2描述了红外传感器的使用,其在马桶使用期间定期“调查”马桶使用者的位置,以判定使用者在使用期间是否主要位于“短区/近区”还是“长区/远区”。如果使用者主要位于短区/近区中,即离马桶较近,则系统假定使用者遗留了固体废物,并且自动使用用水较多的较长时间冲洗。如果使用者主要位于长区/远区中,即离马桶较远,则系统假定使用者遗留了液体废物并且自动使用用水较少的较短时间冲洗。
9.名称为“system and method for a reduced water consumption vacuum toilet(用于降低水消耗的真空马桶的系统和方法)”的美国专利no.6,226,807公开了一种真空马桶,其包含重量传感器以感测施加到马桶的便池的重量。通过测量施加到便池上的重量的有无,传感器检测使用者在使用马桶时是站着还是坐着。如果检测到重量,则连接到传感器的冲洗控制单元命令使用标准水量来冲洗马桶。如果传感器没有检测到重量(表示使用者刚才是站着的),则冲洗控制单元命令在冲洗中使用少量水。
10.在另一示例中,名称为“toilet
‑
flushing control apparatus(马桶冲洗控制设备)”的美国专利no.4,707,867教导了一种设备,其包括检测器(检测马桶上有无使用者的光学、热传感器或其它检测器)、延迟电路、判断电路、第一计时器、第二计时器和冲洗阀。检
测器检测有人正在使用马桶,并输出输入到延迟电路的信号。在接收到该信号后经过预定时间时,延迟电路向判断电路供给信号。当检测器的信号持续时间短于参照时间时,判断电路判定为马桶使用者已经排尿。相反,当该信号持续了参照时间或更长时间时,判断电路判定为马桶使用者已经排便。在第一种情况下,第一计时器作动,并且冲洗阀打开对第一计时器设定的时间,从而冲洗马桶。在第二种情况下,第二计时器作动,并且冲洗阀打开对第二计时器设定的时间,从而冲洗马桶。对第一计时器设定的时间短于对第二计时器设定的时间。因此,每次排尿后用少量水冲洗马桶,每次排便后用大量水冲洗马桶。
11.名称为“automatic dual flush activation(自动双冲洗触发)”的美国专利申请no.2008/0078014 a1公开了通过检测马桶使用者的使用时间(即,使用者使用马桶花费的时间)来自动控制冲洗阀的冲洗量的方法。如果确定使用时间比一组预编程值“长”,则使用全冲洗量。相反,如果确定使用时间为“短”,则使用较小冲洗量。通过使用各种传感器类型中的任何一种对使用者在马桶上/附近出现的时间计时来确定所述使用时间:红外线、电容、重量、热、运动或其组合。
12.名称为“an automatic flushing device for a flush toilet(用于冲水马桶的自动冲洗装置)”的ep 0 453 702 a1公开了一种用于冲水马桶的自动冲洗装置,其包括红外传感器和与红外传感器连接的电子电路。红外传感器检测马桶已被使用的时间长度并致动电子电路将线圈通电,以使与长斜方形的球状物(rhomboidal ball)连接的圆形块磁性地向上移动,该菱形滚珠阻挡能够分配三种冲洗量的出口。根据使用者已在马桶上花费的时间量,水箱被打开相应的适当的冲洗量。
13.名称为“water saving device of tank system water closet(水箱系统抽水马桶的节水装置)”的jph 0270839描述了一种装置,其基于使用者在马桶上的停留来检测使用者已经排尿还是排便,并自动调节“冲洗的构成”以节水。
14.2000年2月17日授权的名称为“lavatory flush regulating system(厕所冲洗调节系统)”的de 19825229 c1描述了一种装置,其具有传感器单元以检测便池的内容物并根据内容物来提供用于自动计量冲洗水的信息。传感器单元是识别粪便气体的气体传感器。在控制单元中处理传感器的信号,控制单元操作阀以供给用于冲洗厕所便池的适当的最佳水量。
15.当马桶“跑水(run)”时也不必要地消耗水,也就是说,由于阀门泄漏、浮臂故障或其它故障,少量的水不断地从水箱跑水进入或流入便池。例如,美国专利no.8,310,369('369专利)已经尝试监测马桶的这种故障。'369专利教导了使用一种传感器,该传感器产生具有与传感器检测到的声音和/或振动相对应的幅值的信号,且其可以包括用于检测或监测泄漏的压电传感器。
16.因此,本领域仍然需要一种系统,该系统可以与冲水马桶相结合地使用,该冲水马桶在没有使用者参与的情况下根据马桶便池的内容物或状态自动调节流入马桶便池的水量。
技术实现要素:
17.有利地,本发明的技术为冲水马桶使用者解决了根据马桶的内容物而在其可以选择的可能的冲洗量中决定使用哪个冲洗量的难题。因为每次冲洗使用从便池清理识别出的
废物所需的最少量的水,因此增加了节水。类似地,本发明的系统可以适于检测例如马桶便池出口的堵塞和/或冲洗阀的泄漏,并且在无需人为干预的情况下“自动地”将流向便池(或水箱)的水量减至零。
18.具体地,本文描述的发明包括一种冲水马桶,其包括与水源流体连通并且安装有传感器系统的马桶便池。传感器系统可包括能够发送超声信号并接收返回信号的换能器。传感器系统可包括用于发送超声信号的发射器和用于接收超声信号的接收器。传感器系统构造成测量信号的飞行时间以获得飞行时间测量值。飞行时间(tof)描述了测量物体、粒子、声波、电磁波或其它波经介质传播一段距离所需的时间的多种方法。在本发明的一个实施例中,飞行时间是指传感器信号如超声信号从传感器出发并返回传感器或从发射器行进到接收器所花费的时间。微控制器与传感器系统电连接,并且构造成接收和使用算法来处理tof测量值以确定便池状态。所述马桶还包括至少一个水阀,所述水阀设置在便池与水源之间,并与微控制器电连接以指示所述至少一个水阀从第一位置移动到第二位置并持续一持续时间,其中该持续时间对应于便池状态。
19.还描述了可以安装到马桶上的系统,所述系统包括如上所述的传感器、微控制器和可选的所述至少一个阀。
20.还提供了一种将释放到马桶便池中的水量调节成与冲水马桶中的便池状态相对应的方法。在一个实施例中,该方法包括从安装在马桶便池上的发射器朝抽水马桶的内容物发送超声信号并接收超声信号。在接收到该信号后,将tof测量值电子地传送给微控制器。微控制器应用一算法,该算法确定与tof测量值对应的便池状态并且电子地指示与马桶便池流体连通的至少一个机电操作的阀从第一位置移动到第二位置并持续一持续时间,其中该持续时间对应于便池状态。在经过该持续时间后,所述至少一个机电操作的阀从第二位置移动到第一位置。
21.还提供了增加马桶节水的方法、检测并改善由故障马桶造成的水浪费的方法、防止下水道气体释放到环境中的方法以及监测商业应用中的马桶的方法。
22.根据一个实施例,冲水马桶可包括:马桶便池,该马桶便池与水源流体连通并且安装有传感器,该传感器包括能够发送超声信号的发射器和能够接收超声信号的接收器,其中传感器构造成测量信号的飞行时间(tof)以获得tof测量值;还包括与传感器电连接的微控制器,其构造成接收并处理tof测量值以确定便池状态;以及至少一个水阀,其设置在便池与水源之间,并且与微控制器电连接以指示所述至少一个水阀从第一位置移动到第二位置并持续一持续时间,其中该持续时间对应于便池状态。
23.根据实施例,冲水马桶可包括是压电陶瓷传感器的传感器。该传感器可安装在马桶便池的外部。该传感器可安装在马桶便池的内部。该传感器可安装在马桶便池的底部中心。发射器可安装在便池的第一侧上,并且接收器可以安装在便池的与第一侧相对的第二侧上。水阀可以是机电操作的阀。水阀可以是电磁阀。水阀可以是冲洗阀。水阀可以是水源阀。
24.根据实施例,便池状态可以选自于:“液体”,“固体”和“中间物/介入物/中级物(intermediary)”。便池状态可以是“液体”,并且冲洗阀可从关闭位置移动到打开位置并持续一持续时间以释放足量的水来清理便池。便池状态可以是“低水位”,并且冲洗阀可从关闭位置移动到打开位置并持续一持续时间以释放足量的水来恢复水封。便池状态可以是
“
固体”,并且冲洗阀可从关闭位置移动到打开位置并持续一持续时间以释放足量的水来清理便池。便池状态可以是“中间物/介入物/中级物(intermediary)”,并且冲洗阀可从关闭位置移动到打开位置并持续一持续时间以释放足量的水来清理便池。可以从“泄漏”、“液体堵塞”、“固体堵塞”和“物体”中选择便池状态。水阀可从打开位置移动到关闭位置。
25.根据实施例,马桶可包括与微控制器电连接的辅助传感器,其用于检测在马桶便池上或其附近有无使用者。辅助传感器可以是用于检测马桶便池前方有无使用者的红外(ir)传感器。辅助传感器可以是用于检测便池内容物沉积在马桶便池中的红外(ir)传感器。
26.根据一个实施例,一种用于安装在冲水马桶上的系统可包括与微控制器电连接的传感器和微控制器,该传感器包括用于发送超声信号的发射器和用于接收超声信号的接收器;其中,该传感器在使用中构造成生成所述信号的tof测量值;微控制器构造成接收和处理tof测量值以确定使用中的马桶便池状态并且可与冲水马桶的至少一个水阀电连接。
27.根据实施例,系统的传感器可构造成使得在使用中,发射器可安装在马桶便池的第一侧上,并且接收器可安装在便池的与第一侧相对的第二侧上。传感器可以是压电陶瓷传感器。
28.根据实施例,该系统可包括可与微控制器电连接的辅助传感器,其用于检测在马桶便池上或其附近有无使用者。辅助传感器可以是用于检测马桶便池前方有无使用者的红外(ir)传感器。辅助传感器可以是用于检测便池内容物沉积在马桶便池中的红外(ir)传感器。
29.根据实施例,一种将释放到马桶便池中的水量调节成与冲水马桶中的便池状态相对应的方法可包括:从安装在马桶便池上的发射器朝马桶便池的便池内容物发送超声信号;通过接收器接收超声信号以确定信号的tof测量值;将tof测量值电气地传送到微控制器,该微控制器确定与tof测量值对应的便池状态并且电子地指示与马桶便池便池流体连通的至少一个机电操作的阀从第一位置移动到第二位置并持续一持续时间,其中该持续时间对应于马桶便池状态;以及在经过该持续时间后,将至少一个机电操作的阀从第二位置移动到第一位置。
30.根据实施例,该方法可包括发射器和接收器,所述发射器和接收器均为压电陶瓷传感器。所确定的马桶便池状态可以选自:“液体”、“固体”和“中间物”。所述至少一个机电操作的阀可以是冲洗阀,所确定的马桶状态是“液体”,第一位置是关闭位置,第二位置是打开位置,并且该持续时间释放足量的水以清理马桶便池。所述至少一个机电操作的阀可以是冲洗阀,所确定的马桶便池状态是“固体”,第一位置是关闭位置,第二位置是打开位置,并且该持续时间释放足量的水以清理马桶便池。所述至少一个机电操作的阀可以是冲洗阀,所确定的马桶状态是“中间物”,第一位置是关闭位置,第二位置是打开位置,并且该持续时间释放足量的水以清理便池。所述至少一个机电操作的阀可以是水源阀,并且所确定的马桶便池状态可以选自“泄漏”、“液体堵塞”、“固体堵塞”和“物体”。第一位置可以是打开位置,第二位置是关闭位置,并且持续时间是不确定的/无限期的/不固定的(indefinite)。
31.根据一个实施例,为一种增加冲水马桶的节水的方法,该方法包括用所公开的任何系统装配马桶。
32.根据一个实施例,一种检测并改善冲水马桶中的水浪费的方法,包括定期启动监
测循环,监测循环可包括:从安装在马桶便池上的发射器朝马桶便池的便池内容物发送超声信号;通过接收器接收超声信号,该接收器确定该信号的tof测量值;以及将tof测量值电气地传送到微控制器,该微控制器确定与tof测量值对应的便池状态,其中当所确定的便池状态为“正常”时,结束该循环,但是当所确定的便池状态是“泄漏”时,微控制器以电子方式指示与马桶便池便流体连通的至少一个机电操作的阀从打开位置移动到关闭位置并持续不确定的持续时间。根据一个实施例,该启动每24小时发生一次。
33.根据一个实施例,一种冲水马桶可包括马桶便池和传感器,所述马桶便池具有外表面和内部空间,所述传感器位于马桶便池的外表面上,其中传感器构造成识别马桶便池的内部空间中的活动。传感器可位于马桶便池的外表面的底部。传感器可以位于马桶便池的外表面的第一侧上,并且接收器位于马桶便池的外表面的第二侧上,其中发射器和接收器位于马桶便池的外表面上的相同轴向高度处。该冲水马桶可包括与传感器通信的微控制器,该微控制器构造成启动对活动的响应。所识别的活动可能是在马桶便池中固体废物的出现,并且响应是打开阀以执行冲水马桶便池的大水量冲洗。活动可能是在马桶便池中出现液体废物,并且响应是打开阀以执行冲水马桶的小水量冲洗。活动可以是向马桶便池中的泄漏,并且响应是关闭供水阀。活动可能是便池中出现低水位,并且响应是打开供水阀。活动可能是便池中出现高水位,并且响应是关闭以防止冲水马桶冲洗。便池中的高水位是由冲水马桶中的固体堵塞引起。便池中的高水位是由冲水马桶上游的管线堵塞引起。活动可能是中间内容物/介入内容物的出现,并且响应是执行冲水马桶的小水量冲洗。
附图说明
34.当结合附图阅读时,将更好地理解前述的发明内容以及下面对本发明优选实施例的详细描述。出于说明本发明的目的,在附图中示出了目前优选的实施例。然而,应当理解的是,本发明并不限于所示的精确布置和设施。在附图中:
35.图1是示出了本发明的系统的实施例的硬件的示意性框图,并且包括水阀。
36.图2是体现的本发明方法的示意图,该方法包括负载感测和/或堵塞检测以及冲洗量或水流的相应调节。
37.图3是本发明的第二示意图,示出了检测各种便池状态的系统和方法的第二实施例。
38.图4是安装有本发明的一个实施例的系统的马桶便池的横截面示意图,其中传感器构造成使得接收器和发射器安装在便池的外部的相对两侧上。
39.图5是示出了在本发明的一个实施例中如何获得tof测量值的超声液位框图。
40.图5a是用于经介质发送和接收信号的系统的示意图。
41.图6是具有完整水封的马桶的横截面。
42.图7是马桶的横截面,其中水位变得太低以至于水封不再足够。
43.图8是固定到瓷砖上以形成如负载感测实验中使用的小型马桶便池的pvc管的照片。
44.图9是表示当仅存在液体时在小型马桶便池中产生的信号的时序图。
45.图10是表示当存在固体时在小型马桶便池中产生的信号的时序图。
46.图11a是根据一个实施例的具有正常水位的马桶的局部剖视图。
47.图11b是根据一个实施例的具有小水量冲洗的马桶的局部剖视图。
48.图11c是根据一个实施例的具有全水量冲洗的马桶的局部剖视图。
49.图11d是根据一个实施例的具有过溢水位的马桶的局部剖视图。
具体实施方式
50.本文描述的发明涉及马桶,其安装有用于根据便池的状态——即,便池内容物的量和/或性质、马桶便池的出口是否被堵塞——来调节释放到马桶便池中的水量、防止向环境中释放下水道气体(例如,硫化氢、氨、甲烷、酯类、一氧化碳、二氧化硫和氮氧化物)等的系统。
51.还提供了相关方法,包括使用该系统的方法以及监测和改善可归因于泄漏或其它马桶故障的水浪费的方法,以及一种系统,在一些实施例中,该系统可以改装到现有和/或已经安装的马桶,以改善节水。
52.有利地,在一方面,本发明允许系统本身在完全没有任何人为干预的情况下“自动地”调节或限制冲洗量。因此实现了更大的节水,因为人为错误和/或疏忽作为障碍被消除。在另一有益方面,本发明提供了一种定期监测马桶便池的内容物以检测可归因于泄漏或其它马桶故障而过量添加水的方法。在本发明的这个方面,当检测到马桶便池中的“泄漏”状态时,系统在无限期的/不确定的/不固定的(indefinite)时间段或至少足够长以允许识别故障并进行补救的时间内自动切断对马桶的供水。以这种方式,减少了不必要的水浪费。
53.本发明包括安装有该系统的冲水马桶。“冲水马桶”是指通过使用从冲洗阀分配的水将液体和固体废物经马桶便池的出口冲洗到通向另一位置以处理的排水管道,以处理液体和固体废物的任何马桶。包括例如坐式或“西式”构型或蹲式构型的冲水马桶,以及虹吸式马桶、双存水弯虹吸马桶、阀门厕所马桶(valve closet toilets)、冲出式马桶(washout toilets)和/或架式马桶。
54.在一方面,本发明包括一种系统,该系统用于安装在冲水马桶上,和/或安装在可以适于允许根据马桶便池的内容物而自动选择冲洗量和/或允许检测马桶堵塞、泄漏或其它类似故障并随后自动切断供水的马桶上。
55.该系统包括传感器。该传感器可包括传感器系统,该传感器系统包括传感器和模拟前端。传感器能够发送信号,例如超声信号,并接收返回信号。模拟前端可启动传感器以朝马桶便池内容物发送信号。该信号可以穿过马桶便池中的液体行进并在液体和空气的分界面上反射。换能器可接收反射信号和/或注意到并记录反射信号的不存在。
56.传感器可替代地包括至少一个发射器和接收器。在使用中,发射器能够产生并朝马桶便池内容物发送超声信号。接收器构造成在便池内容物衰减或阻挡信号的情况下接收信号和/或注意到并记录信号的不存在。由于信号和/或反射信号可能被便池的内容物衰减或吸收,如本文所使用的与传感器和接收器相结合的用语“接收信号”包括识别信号和/或反射信号的不存在。
57.传感器系统构造成使用由传感器获得的与信号行进有关的信息来产生飞行时间测量值(“tof测量值”)。模拟前端可使用算法来确定tof测量值。在一些实施例中,所生成的tof测量值是从通过信号的重复发送/接收而提供的若干组信息获得的平均tof。在另一实施例中,tof测量值可以是在马桶使用期间的时间点和/或在马桶使用之后的一持续时间内
采集的多个tof数据点。tof测量值也可以基于单个tof数据点。
58.在使用中,传感器系统可安装在便池的外侧或便池的内部。在许多实施例中,有利的是将传感器安装在便池的外侧,以防止废土、水矿物和/或清洁剂的阻塞或积聚。废土、水矿物和/或清洁剂的集中可能是不卫生的,可能降低传感器的有效性,可能干扰感测元件,和/或可能使感测元件劣化。通过将传感器系统定位在便池的外部,便池内的物体不会干扰感测。也就是说,物体不会损坏、劣化或降低传感器的有效性。
59.在一个实施例中,可能优选的是,传感器位于马桶便池的中心底部(参见例如图2,图2示出传感器在马桶便池下方的位置),或者传感器可构造成使得发射器位于马桶便池的第一侧,并且接收器位于相对的第二侧(见图4)。在各种实施例中,发射器和接收器可以独立地位于便池的外部或内部。当传感器(或传感器的一部分)位于便池的外部时,在一个实施例中可能优选的是,它被布置成使得它直接邻近便池的陶瓷材料,而便池的陶瓷材料又直接邻近马桶便池中的液体,马桶便池中的液体又直接与环境(空气)交界,而没有间隔空间或间隔层,如下面的示意性剖视图中所示:
60.空气液体陶瓷传感器
61.类似地,如果传感器(或传感器的一部分)位于便池的内部,则在一个实施例中可能优选的是,其布置成使得其直接固定在便池的陶瓷表面上,并且直接邻近马桶便池中的液体就位,马桶便池中的液体又直接与环境(空气)交界,而没有间隔空间或间隔层,如下面的示意剖视图中所示:
62.空气液体传感器陶瓷
63.传感器可以是本领域中已知或将要开发的任何超声传感器或基于声学技术的传感器。在一个实施例中,传感器是压电陶瓷换能器。可以构想其它传感器,例如但不限于压电换能器和电容传感器。在传感器是电容传感器的实施例中,传感器可以通过比较电容的变化以确定水位和便池状态来操作。
64.模拟前端可以是能够启动传感器以发送信号并确定信号的tof测量值的任何设备。示例性模拟前端(afe)可从德州仪器公司(texas instruments,inc.,12500ti boulevard,dallas,texas 75243usa)获得(例如,用于感测应用的tdc 1000超声感测模拟前端(afe),其内容通过引用并入本文)。
65.传感器系统可包括时间
‑
数字转换器。时间
‑
数字转换器可以是可从德州仪器公司(texas instruments,inc.)获得的tdc 7200。时间
‑
数字转换器可将从模拟前端接收的tof测量值转换为数字输出,以用于发送到微控制器。
66.该系统还包括与传感器系统电连接的微控制器。该微控制器可位于马桶的上部外壳中,例如靠近马桶上的红外(ir)传感器。或者微控制器可位于马桶的便池下方或水箱的顶部部分上。微控制器与传感器系统(以及本文描述的任何其它系统)之间的电连接可以为
传统的硬连线或经由例如wifi(可能优选wlan或wpan)、蓝牙、ble、wimax连接的无线的电连接。由传感器系统(即,通过模拟前端)产生的tof测量值通过电连接以电子方式传送到微控制器。微控制器加载有允许微控制器接收并处理tof测量值的算法。
67.一旦输入tof测量值,微控制器就应用算法来确定便池的状态(“便池状态”)。该算法可被编写成便于检测各种便池状态,因为由传感器生成的tof测量值将根据便池内容物的状态(例如,当进行tof测量时便池内容物中存在的介质(如果有的话)的类型)而不同。便池内容物可以是任何固体、液体或中间物/介入物/中级物(intermediary)(例如纸巾),或者便池中可以没有内容物。可以将各种便池状态与“正常”状态进行比较。可以基于马桶便池中的常规水位下的tof测量值来确定“正常”的便池状态。常规水位可以是预定水位。可以基于马桶型号预先确定常规水位。常规水位可以是足以在马桶中建立水封的水位。可以例如在制造厂针对特定的马桶型号确定“正常”状态。“正常”状态可以是从代表相同或类似的马桶模块的一组值中选择的设定值(例如,平均值)。
68.应当理解的是,与每种“便池状态”(包括“正常”状态)对应的tof测量值可能因马桶而异,取决于各种因素,例如便池结构、制造材料和影响马桶声学性能的其它物理参数,以及合计成(aggregated)tof测量值的tof数据的类型、数量和性质。因此,由微控制器应用的算法将有所不同。然而,在一般水平上,该算法包括将所生成的tof测量值与tof测量值的基线组进行比较,所述tof测量值的基线组包括与编程者希望为其分配调节后的冲洗量的每种便池状态(包括“正常”状态)相对应的tof测量值。例如,编程者可以将调节后的冲洗量分配给与泄漏、堵塞、较低水量等对应的tof测量值。
69.可以使用任何标识(例如,字母、数字、符号等)来标记各种类型的便池状态。然而,为方便起见,这里使用与实际物理内容物对应的简单名词来描述便池状态。示例性的便池状态可包括但不限于:(i)便池水中存在固体废物(“固体”);(ii)便池中仅存在液体(“液体”);(iii)连续跑水进入/漏入便池中(“泄漏”);(iv)便池中的水位低(“低”);(v)便池中的水位高,例如由于马桶便池出口的堵塞(例如工业应用中的管路堵塞,其中存在于系统的下游部分的堵塞产生在上游大量/成组马桶中的堵塞)(“液体堵塞”);(vi)由于残留在马桶便池中的固体而导致的便池中的高水位(“固体堵塞”);(vii)存在中间内容物,例如便池水中的纸或纸巾(“中间物”);(viii)便池水中存在非粪便固体(例如,儿童玩具、手机或其它不适当的物体)(“物体”);和(ix)非常低的水位,可能允许下水道气体的释放(“未密封”)。
70.微控制器可以是本领域中已知的或开发的能够处理从模拟前端接收的tof测量值以确定便池的状态(“便池状态”)的任何微控制器。微控制器可以确定与便池的状态相对应的将要由马桶系统采取的动作。微控制器可基于便池状态来向冲洗阀、水源阀或其它阀发送指令以打开、关闭或保持在当前状态。示例性微控制器包括可从texas instruments,inc.,12500ti boulevard,dallas,texas 75243usa获得的微控制器(微控制器msp 430)或来自microchip of phoenix,arizona的pic微控制器。微控制器可以是基于arm的微控制器。
71.在本发明的系统中,微控制器在算法中使用tof测量值来确定便池状态,并且以电子方式向系统中的一个或多个水阀传送指令以向便池输送适当的冲洗量或者完全阻止水源进入马桶,使得没有另外的水进入马桶便池或水箱。
72.在一个实施例中,阀是机电操作(electromechanically operated)的阀,其可以
是本领域已知的或将要开发的任何阀。在一些实施例中,可能优选的是,机电操作的阀是电磁阀。该阀也可以是直流电机阀或步进电机阀。如果实施例涉及响应于特定的便池状态调节冲洗水量,则阀可以例如是设置在便池与水源(例如,水管或水箱)之间的冲洗阀或将马桶作为整体给马桶供水的水源阀。
73.在一个示例性实施例中,当算法确定便池在便池的内容物含有固体废物(便池状态为“固体”)时,微控制器以电子方式指示一个或多个冲洗阀从关闭位置移动到打开位置并持续足以释放第一冲洗量的持续时间。相应地,当微控制器确定便池包含液体(便池状态为“液体”)时,微控制器以电子方式指示冲洗阀打开足以释放第二冲洗量的持续时间,并且当微控制器确定便池包含废纸或其它中间材料(便池状态是“中间物”)时,微控制器指示冲洗阀打开足以释放第三冲洗量的持续时间,等等。一旦已经释放了适当的水量,一个或多个阀就会移动到关闭位置,并且系统复位。因此,可以理解的是,该系统可允许基于马桶便池的特定内容物来定制被冲洗通过系统的水量。
74.在每种情况下,第一、第二、第三(等等)冲洗量可以是不同的,并且可以被校准为恰好足以(“充分的”)从便池中清除识别出的内容物的水。在每种情况下适合(或足够)的冲洗量将根据系统安装到其上的特定马桶的结构而不同。然而,平均而言,足以除去固体的水量可以是约2.5至6升水,足以除去仅液体的水量可以是约0.5至5升,并且足以除去纸的水量可以是约1至5升。
75.在一个实施例中,当微控制器确定便池正在接收连续的水流(即,便池状态是“泄漏”)或者包含高于“正常”的水位(即,便池状态是“液体堵塞”或“固体堵塞”)时,微控制器电气地指示水源阀从打开位置移动到关闭位置达一定持续时间。“水源阀”是指这样一种阀,将马桶作为整体控制进入马桶的水流,而不仅仅是控制进入马桶便池的水流。
76.在该实施例中,由于目标是在特定故障被确定之前避免马桶过溢和/或水浪费,所以持续时间可能非常长,例如1至5小时、10小时、24小时、48小时、72小时、100小时或不确定的/无限期的/不固定的时间;在任何情况下,可能优选的是,阀保持在关闭位置足够的时间以使得故障能够被发现并修复并且系统复位。系统复位可基于传感器系统检测到便池的“正常”状态并向微控制器发送正常tof测量值而是自动进行的。或者,使用者可以手动复位系统,例如用按钮。
77.在一个实施例中,该系统能够确定便池中的水位何时非常低,即低到以至于马桶的机械水封可能不充分或完全丧失。“机械水封”是指位于马桶存水弯中的水,其防止下水道气体经便池出口回流泄漏。如本领域所公知的,马桶水封的尺寸以垂直距离描述,即,存水弯浸入部(dip)与平均水位之间的垂直距离。许多现代建筑规范要求在平均水位与存水弯浸入部之间具有最小垂直距离(例如,1.5英寸,2英寸)的水封,以确保工作系统中水封的完整性和充分性。以这种方式,水的物理屏障从堰部(weir)经存水弯延伸到存水弯浸入部上方2英寸处。
78.在该实施例中,微控制器被编程为判定水位是否低至水封小于所需的最小垂直距离(便池状态“低水位”)。如果微控制器检测到这种状况,则它以电子方式向系统中的一个或多个水阀发送指令,以向便池输送适当的冲洗量,该冲洗量至少足以恢复水封所需或期望的最小垂直距离并因此维持水封。如本领域技术人员所理解的,该冲洗量将根据存水弯和便池的整体尺寸而变化。
79.该系统还可以包括能够在马桶便池中或附近执行附加事件的其它辅助传感器和/或辅助装置。在一些实施例中,该系统可包括一个以上的超声传感器,和/或附加的传感器,例如气体检测器、红外传感器、浮子传感器(用于检测水位)等。在一些实施例中,辅助装置可以与微控制器电连接,并且在来自微控制器的指令下执行附加事件。例如,在冲洗阀释放之前、之后或期间,可以指示辅助装置分配清洁剂、除臭剂、空气清新剂、用于清洁便池或使用者的定向水流、音乐小曲或其它声音,和/或开启或关闭一个或多个灯。
80.在一个实施例中,该系统包括用于检测在马桶便池上或附近有无使用者的辅助传感器。该辅助传感器可以是例如红外(ir)传感器,其构造成检测在马桶便池前面有无使用者或用于检测内容物沉入便池中。
81.在一个实施例中,红外传感器与微控制器电连接;当红外传感器检测到有使用者时,它电气地向微控制器发送信号,这致使微控制器提示传感器的发射器开始向便池内容物发送超声信号。以这种方式,本文描述的发明和发明方法的实践可以在没有任何有意的人为干预的情况下执行。
82.从上面的讨论中可以明显看出,本发明还包括冲水马桶,其安装有上述元件的任意排列的所述系统。该系统可以在制造商处安装在马桶上,并作为集成产品提供给消费者。或者,在一些实施例中,可以单独提供系统以改装到现有的预安装的马桶上。在一个实施例中,该系统还可包括机电操作的阀或者它可包括电子致动的驱动器,该驱动器可以用于将传统的机械阀转换成可以机电操作以与所述系统一起使用的阀。
83.还包括增加马桶的节水的方法,其包括用任何本文描述的系统来安装马桶。例如,当系统用于检测泄漏时,可关闭马桶中的一个或多个阀以防止进一步的水泄漏。另外,如上所述,可以通过各种冲洗量的编程来实现节水,从而允许用于便池内容物的适量的水被输送到马桶。
84.本发明的范围还包括一种通过提供针对马桶便池中的高水位或便池内容物的接近连续低水位湍流(其指示冲洗阀的泄漏或其它故障)自动监测马桶的方式来检测和防止或改善不必要的水浪费的方法。这些方法包括定期触发监测循环,该监测循环包括:i)从安装在马桶便池上的发射器向马桶便池的内容物发送超声信号;ii)由接收器接收超声信号,该接收器确定信号的tof测量值;iii)将tof测量值电气地传送到微控制器,该微控制器应用算法来确定与tof测量值对应的便池状态。
85.如果微控制器所应用的算法指示便池状态是“正常”,则循环结束。然而,如果所确定的便池状态是“泄漏”或“高水位”或“湍流”等,则微控制器以电子方式指示至少一个与马桶便池流体连通的机电操作的阀从打开位置移动到关闭位置。阀可以保持关闭,直至识别并修复故障并且复位系统。如前所述,系统可基于指示“正常”状态的新tof测量值自动复位或者由使用者手动复位。
86.监测系统的启动可以手动实现,或者可编程为以各种时间间隔发生,例如,每24小时一次、每周一次、每月一次等。监测系统可以是基本上连续的,从而发送信号并以被编程的间隔来记录tof测量值,包括频率为每小时的间隔。这种基本上连续的监测可快速检测诸如“泄漏”和“堵塞”的状态并且致动阀以打开、关闭或保持在当前状态,或者以前述方式致动其它部件,直到状态得到纠正。监测的频率可以基于应用。例如,在商业用途中,例如在运动场所,系统可被编程为在体育赛事期间频繁地发送传感器信号,并且当场地空置时基本
上处于休眠或睡眠状态。在诸如办公室或机场的其它商业用途中,系统可被编程为分别在办公时间或旅行高峰时间段期间进行监测,并且在非工作时间期间保持休眠。微控制器可使用确定传感器系统何时监测和何时休眠的使用计划进行编程。
87.由于水湍流可指示水泄漏或从一定距离遗留人体液体废物,例如当马桶正由处于站立位置的男性使用时,微控制器的算法可允许区分较低湍流水平(泄漏)与较高湍流水平(站立排尿)。当液体由于马桶中的泄漏或是通过使用者的排尿而泄漏到马桶中时,马桶便池内的液体表面中的湍流将会增加。当存在湍流时,传感器系统可能无法确定tof测量值。传感器系统可产生一系列“正常”tof测量值,然后产生一系列“零”tof测量值(指示没有反射信号或接收器没有接收到信号)。因此,该算法例如可确定与多个“零”tof测量值对应的湍流水平。也就是说,传感器系统可产生交替的一系列“正常”和“零”tof测量值。在所产生的“零”tof测量值的数量高并且未趋近“正常”tof测量值的稳定状态的情况下,存在高湍流,并且微控制器可确定便池状态是“泄漏”。当一系列“正常”和“零”tof测量值返回到“正常”tof测量值的稳定状态时,系统可确定液体已经沉积在马桶便池中。基于所确定的便池状态,微控制器可以采取如前所述的适当的动作。
88.参考图1至图4,具体说明了各个方面和实施例以说明本发明。图1是示出了本发明的系统的一个实施例的硬件配置的示意性框图。在本实施例中,传感器系统104包括传感器100,传感器100可以是超声换能器,例如压电陶瓷换能器。传感器系统104可包括与传感器100电耦合的超声模拟前端(afe)102。传感器系统104可包括时间
‑
数字转换器(tdc)106,其将飞行时间(tof)测量值转换为数字输出。可以省略tdc 106,并且微控制器110可包括编程以执行tdc 106的功能。
89.继续参考图1,afe 102将脉冲发送到传感器或超声换能器100。脉冲致使超声换能器100谐振,从而从换能器100发射超声信号。如前所述,超声换能器100可位于马桶便池的外表面上和马桶便池的基部处,靠近下部(图2)。换能器100可位于马桶便池的正常液体线之下。因此,超声信号从马桶底部穿过液体行进,直至它到达液体表面(即马桶便池中的液体与马桶便池中液体上方的空气之间的交叉处或屏障/界线处)。在液体表面处,超声信号被反射并返回到换能器100。
90.再次参考图1,afe 102可检测到信号已经返回到换能器100。然后,afe可生成与超声信号离开换能器100、在液体/空气界面或其它马桶便池内容物上反射并返回到换能器100之间经过的时间相对应的飞行时间(tof)测量值。由afe 102生成的tof测量值可由tdc 106转换成数字输出。作为示例,afe 102是tdc 1000,并且作为示例,tdc 106是tdc 7200,tdc 1000和tdc 7200两者均来自德州仪器公司(texas instruments,inc.)。数字形式的tof测量值经由串行外围接口(spi)108传送到微控制器110。在该实施例中,微控制器110由电池112经由功率/电源转换模块114供电。
91.在接收到tof测量值后,微控制器110通过应用算法来处理tof测量值以确定便池状态。微控制器110将tof测量值与预选的“正常”状态(如前所述,针对马桶模块确定)进行比较。如果算法的结果表明便池状态不是预选的“正常”状态,则微控制器110经由数字信号130(例如通用输入/输出gpio接口)将信号电气地传送到机电操作的水阀116。该信号致使阀116从第一位置移动到第二位置。在一个实施例中,水阀116可包括电磁驱动器118,以在第一位置与第二位置之间致动电磁阀120。第一和/或第二位置可对应于阀的打开位置、关
闭位置和/或部分打开位置。
92.再次参考图1,该实施例还可包括辅助传感器122,该辅助传感器122可以是能够确定在马桶便池(未示出)附近有无使用者的红外传感器。辅助传感器122可以触发传感器系统104以发送超声信号,如将参考图2讨论的。
93.图2是本发明的示意图,示出了检测各种便池状态(例如,“堵塞”、“液体”、“固体”)并将冲洗量和/或水流量调节成与便池状态相对应的系统和方法。在本例中,传感器是压电陶瓷传感器228,其位于马桶便池226的底部中央部分中。在图2中,使用者224或224'将固体废物或液体废物沉积在马桶便池226中。诸如ir传感器的辅助传感器222检测(1)使用者224/224'是否已离开马桶的区域并将指示该事件的信号发送(2)到微控制器210(例如微控制器110)。微控制器210指示(3)信号处理器204发送(4)超声信号。信号处理器204的传感器(例如换能器100)发送信号并接收(5)响应信号。信号处理器204可生成tof测量值(例如,利用afe 102)。信号处理器204将tof测量值(6)传送到微控制器210。微控制器210处理tof测量值以确定便池状态,并向水阀230发送信号以将水量和持续时间216调节成与便池状态相对应。
94.图3是本发明的示出了用于检测各种便池状态(例如,“低水位”、“液体”、“中间物”、“固体”、“液体堵塞”或“固体堵塞”)的系统和方法的逻辑流程的示意图。在图3中,包括可以是ir传感器的辅助传感器322,以在该传感器检测到马桶附近或马桶上出现使用者时启动系统。ir传感器与用于收集和处理信息的系统330电连接。系统330可以是关于图1和2描述的系统,并且可包括如前所述的传感器系统。如前所述,从传感器系统发送超声信号,并且在可能时接收超声信号以获得tof测量值。tof测量值被报告给微控制器,微控制器将算法应用于tof测量值以确定便池状态。
95.与马桶便池包含常规水位的水时从发射器到接收器的传感器信号的飞行时间相对应的“正常”tof测量值被预先选择并加载到算法中。如在图3中可以看出,微控制器被编程为将传感器系统的模拟前端返回的tof测量值与“正常”状态下的tof测量值进行比较。当便池水位高于常规水位(图3中的箭头b)时,例如,如果存在管路堵塞(例如,“液体堵塞”状态),则与“正常”tof测量值相比,tof测量值可能较大。较大的tof测量值可以是在与“正常”状态相对应的tof测量值之上的任何tof测量值。该信息以电子方式传送给微控制器。微控制器可致动水源阀以从打开位置移动到关闭位置,从而有效地防止任何额外的水进入马桶或马桶便池。
96.继续参考图3,当例如便池水位低于常规水位(图3中的箭头a)时,与“正常”tof测量值(例如,“水封”状态)相比,tof测量值可能相对较小。换句话说,在算法中存在含有非常低水位的水的马桶便池的“低水位”tof测量值。当便池水位低于正常水位时,与“正常”相比,tof测量值相对较小。该信息以电子方式传送给微控制器,因此微控制器可启动阀以向便池输送适当的冲洗水量。在这种情况下,该水量至少足以恢复水封所需或期望的最小垂直距离并因此足以保持水封并防止下水道气体逸出到环境中。水封可以是例如机械水封。
97.当在马桶便池的液体中存在固体废物(例如,“固体”或“固体堵塞”状态)(图3中的箭头c)时,tof测量值为0或接近0。超声信号被马桶便池中的固体衰减或吸收。因此,信号不会反射回传感器或以最低水平反射回来。一旦该信息被传送给微控制器,微控制器就可以基于马桶历史数据来判定该tof测量值是否表示“固体”或“固体堵塞”。这种历史数据例如
可以是马桶是否已完成先前的冲洗。如果状态是“固体”,则微控制器可致动冲洗阀从关闭位置移动到打开位置并持续一持续时间,该持续时间允许足够量的水到达便池以从便池中清除固体并从马桶出口流出(“全冲洗”)。一般而言,该水量为约3至5升,但是该水量将根据特定马桶的结构而变化。该水量可由微控制器预先确定。如果状态为“固体堵塞”,则微控制器可防止阀打开并且可防止发生冲洗。
98.在便池水仅包含尿液(例如,“液体”状态)的情形中,算法的结果可指示与图3中的箭头d、e和f相对应的几种不同状态。例如,tof测量值可指示约等于“正常”状态(箭头d)下的tof测量值的tof测量值,或指示为在马桶使用的持续时间(箭头e)内与tof值为0交替的约等于正常状态的tof的tof测量值。该信息一旦以电子方式传送给微控制器,就会致使微控制器致动冲洗阀从关闭位置移动到打开位置以持续一持续时间,该时间容许释放足够量的水到便池中以从便池中清理尿液并从马桶出口流出(“小冲洗”)。一般而言,该水量比清理固体废物所需的水量小约四分之三。根据经验,该水量约为0.5至5升。该水量可由微控制器预先确定。
99.当便池包含液体废物和卫生纸或纸巾时(图3中的箭头f),算法的结果将指示为在马桶使用的持续时间和马桶使用完成之后的持续时间内与tof为0交替的正常状态的tof或接近该正常状态的tof。该信息一旦以电子方式传送给微控制器,就会致使微控制器指示冲洗阀从关闭位置移动到打开位置达一持续时间,该持续时间允许释放足够量的水到便池中以从便池中清理尿液和纸/纸巾并从马桶出口流出(“中间物冲洗/中间冲洗/中级冲洗”(intermediate flush))。一般而言,该水量小于清理固体废物所需的水量。该水量取决于马桶的结构可以在约1升至约5升的范围内变化。该水量可由微控制器预先确定。
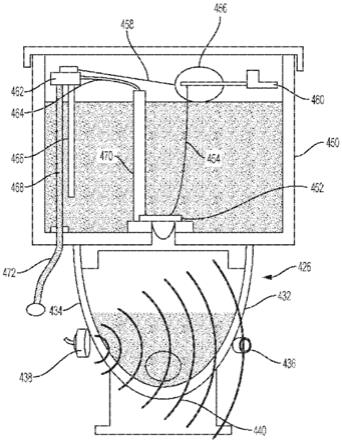
100.图4是马桶的横截面的示意图。该马桶可包括水箱450和手柄460。水箱450内部可以有冲洗阀452、冲洗阀链454、浮球456和浮臂458。马桶还可包括进水阀462、便池再填充管464、过滤器管466、进水管468、溢流管470和供水管路472。图4中的马桶可包括对于传感器(图1中的换能器100)的替代布置。传感器可包括发射器438和接收器436。发射器438和接收器436可以在马桶便池432上的相同水平或相同的轴向高度处。发射器438和接收器436可以与例如地板、马桶中的水位、马桶座圈或马桶上或附近的其它相对位置平行。发射器438和接收器436可以是压电陶瓷换能器。发射器438可位于马桶便池426的第一侧434上,接收器436可安装在马桶便池426的第二侧432上,与发射器438相对。如从图4可以理解,超声信号440在从发射器438行进到接收器436时穿过马桶便池和马桶便池426的内容物。当马桶便池处于常规水位状态时,超声信号440在正常状态下横穿马桶便池426。当马桶便池的内容物不是常规水位(如关于图3所述)时,超声信号440可能要用更多或更少的时间来横穿马桶便池426。固体或固体堵塞物的存在可吸收超声信号(即,超声信号440被衰减)并且接收器436可能接收不到信号,或者能接收到最小的信号。图4可包括如前所述的afe和微控制器,以根据在接收器436处接收的信号确定tof测量值,并从而确定便池状态。
101.图5是本发明的一个实施例的系统的简单版本的示意图,示出了传感器(换能器)、相关电路和微控制器的相互关系。图5描绘了示意性马桶便池500,其中传感器510位于马桶便池500的底部外表面上。如前所述,传感器510可以是超声换能器,例如压电陶瓷换能器。模拟前端(afe)530可致使传感器510谐振,从而产生超声信号550,该超声信号550穿过马桶便池500中的液体。信号550到达目标520并朝传感器510反射回来,目标520可以是流体与空
气之间的屏障/界线或分隔物或界面。传感器510接收信号550,然后afe 530产生tof测量值,该测量值被传送给微控制器540。
102.图5a是根据本公开的原理用于发送和接收信号并处理信号以确定飞行时间测量值的系统的示意图。图5a的系统可包括传感器或换能器510,例如如前所述的超声换能器或压电陶瓷换能器。传感器或换能器510可与模拟前端(afe)530电连接。afe 530可启动换能器510谐振,从而生成信号550a,例如超声信号。信号550a将传输通过第一介质560(例如,在图5的示例中,液体或水)。当信号到达诸如第一介质560与第二介质570之间的屏障/界线或过渡物的目标520时,信号可以作为返回信号550b反射回换能器510。目标520可以是固体屏障/界线或目标物,或者可以是两种介质(例如第一介质560和第二介质570)之间的过渡物。第一介质560可以是例如液体或水(例如存在于马桶便池中),第二介质570可以是例如空气(例如存在于马桶便池中的液体或水上方)。目标520也可以是马桶便池的壁;在这种状况下,afe 530可被编程为忽略这些反射,并且仅确定从马桶便池中的物体或马桶便池中的液体/空气过渡物反射的信号的tof测量值。当换能器510接收到返回信号550b时,信号被传送给afe 530,然后afe 530确定从在换能器510中启动该信号到该信号返回换能器510的tof测量值。因此可以理解的是,由于超声信号以不同的速度通过不同介质传播,因此tof测量值可基于介质560、570和目标520而变化。
103.图6和图7示出了马桶的横截面,示出了该系统可用于检测和补救“低水位”便池状态从而防止下水道气体逸出到环境中的状况。图6示出了马桶便池626的横截面,其中水在马桶出口652中并且具有符合要求的水封644,该水封可以是机械水封644,其中该机械水封的尺寸为2英寸(即,水面646与存水弯浸入部648之间的垂直距离642(“vd”)为2英寸)。机械水封644防止任何下水道气体650通过便池出口倒流并逸出到环境中。
104.图7示出了马桶的横截面,其中马桶中的水面746变得如此之低以至于vd 742(水面746与存水弯浸入部748之间的垂直距离)低于零并且下水道气体750经由马桶出口752离开,根据本发明,当测量到“低水位”时,该信息以电子方式传送到微控制器,并且因此将适当的冲洗水量输送到便池中,在这种情况下,这样的水量至少足以恢复用于机械水封的最小vd,从而保持机械水封并防止下水道气逸出到环境中。
105.示例1
106.通过将pvc管安装到陶瓷墙砖上来复制小型马桶便池,如图8所示。将来自stem公司的型号为smd 15t21r111wl的压电陶瓷传感器在pvc管800的底部定位在瓷砖802的底面上。将pvc管的空腔填充一定体积的水(约1.8kg)以实现第一水位,获得“正常”804和“正常”tof测量值。参考图9,当腔体中仅存在水时,“开始”与“停止”之间的距离/间隔是使用以下计算式的飞行时间测量值:流体液位=(tof
×
声音的流体速度)/2。
107.在图9中,描绘了来自用于监测图8的示例性小型马桶便池的传感器的数据。图9中的曲线图是当液体处于马桶便池的常规液位时的测试持续时间的电压
‑
时间曲线图。数据920表示由传感器发送和接收的原始超声信号。数据点900表示afe何时将起始脉冲发送到传感器并且从换能器发送超声信号。数据点910表示传感器已接收到返回信号,或者接收器(在如图4的发射器/接收器的传感器中)接收信号。记录开始位置与停止位置之间的时间并生成tof测量值。在该示例中,该时间为约60(微秒)。因此,使用图9中的数据,流体液位=(60μs
×
1484m/s)/2=45mm。也就是说,在示例性正常状态下便池中的流体液位是45mm。
108.返回参考图8的示例,将一部分味噌酱(50克)放置在pvc管800中。参考图10,发送传感器信号并记录与传感器信号相对应的tof测量值。数据1020表示由传感器发送的原始超声信号。数据点1000表示afe何时将起始脉冲发送到传感器并且从换能器发送超声信号。在本例中,当腔体中存在固体(例如,味噌酱)时,仅存在“开始”,因为固体将该信号衰减(或吸收)。也就是说,传感器未接收到返回信号。因此,tof测量值是检测到不存在可确定的tof飞行。可以对微控制器进行编程以区分大约45mm的tof和不可确定的tof,并且将它们分别与“液体”状态和“固体”状态相关联。
109.在图11a
‑
11d中,根据一个实施例,可以看到马桶1100的各种状态。图11a
‑
11d描绘了具有传感器系统1102的马桶1100的侧视图。传感器系统1102可以以前面描述的方式操作,以与微控制器(未示出)通信以检测马桶便池1104的状态。在图11a中,该状态可以是正常液位1106并且可以对应于“正常”状态tof测量值,其它状态可与该“正常”状态进行比较。在图11b中,传感器系统1102和微控制器可检测马桶便池1104中的尿液1108或其它轻质液体(light liquid)。可以将tof测量值与“正常”状态的tof测量值(例如,液位1106的tof测量值)进行比较。然后,微控制器可致动马桶1100中的阀打开指定的时间以进行小水量冲洗。在图11c中,传感器系统1102和微控制器可以检测马桶便池1104中的固体1110,例如固体废物。可以将tof测量值与“正常”状态的tof测量值(例如,液位1106的tof测量值)进行比较。然后,微控制器可致动马桶1100中的阀打开指定的时间(例如,比图11b的状态打开的时间长的时间)以进行全水量冲洗。在图11d中,传感器系统1102可检测马桶便池1104中的过溢状况1112。可以将tof测量值与“正常”状态的tof测量值(例如,液位1106的tof测量值)进行比较。然后,微控制器可致动马桶1100中的阀关闭,直至从马桶移除堵塞物1114或其它障碍物。
110.从前面的公开内容可以理解,该系统可测量马桶便池中的水位。该系统可通知需要使用者干预的异常状况。在实施例中,如果水位超过预定水位,则系统可禁用自动冲洗并通知潜在的马桶堵塞或过溢状况。在实施例中,该系统可防止或限制浴室中的水破坏。系统可检测马桶中存在的内容物仍留在马桶中(例如,由于无效的冲洗),并且微控制器可发送信号以进行随后的冲洗。
111.本领域技术人员应理解的是,在不脱离其广泛的发明构思的情况下,可以对上述实施例进行变更。因此,应该理解的是,本发明并不限于所公开的具体实施例,而是旨在涵盖如所附权利要求所限定的本发明的精神和范围内的变型。尽管前面的描述是针对本发明的优选实施例,但应注意,其它改变和变型对于本领域技术人员来说是显而易见的,并且可以在不脱离本发明的精神或范围的情况下进行。此外,结合本发明的一个实施例描述的特征可与其它实施例结合使用,即使上面没有明确说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1