一种新型耙吸挖泥船耙头的制作方法
1.本发明属于疏浚工程技术领域。
背景技术:
2.耙吸挖泥船是疏浚工程的重要设备,目前已逐渐主导着国际的疏浚市场,近年来,耙吸挖泥船正逐渐地向着巨型化、高度智能化、多功能化和标准化的方向快速发展。
3.耙头是耙吸挖泥船疏浚挖掘过程中的主要执行机构,其主要由固定体、活动罩、耙齿、高压冲水等部件组成。疏浚作业过程中,耙头直接与土体接触,通过耙齿入土,联合高压冲水将土体从海底破碎并沿活动罩吸口区域输送到泥泵。耙头的作业位置和破土状态直接关系到疏浚过程的施工产量和效率。因此,采用相关的方法来实时监测耙头的作业位置和状态,对整个疏浚过程显得尤为重要。
4.目前,通过耙臂、耙头精确数值模型的建立,在耙头上安装压差传感器、活动罩行程和压力传感器,并结合耙臂水平和垂直角度传感器来监测耙头位置的功能已实现。但是,由于耙齿与土体相互作用的复杂性及施工土质的多变性等诸多因素,在疏浚作业过程中耙齿实际入土深度的状态监测尚未能够实现,只能通过耙齿距离耐磨块的深度来估算耙齿的入土深度,这就导致疏浚装备在作业过程中对耙头破土方量的估算存在较大误差。
技术实现要素:
5.针对上述问题,本发明的目的是针对现有耙头,改造耙吸挖泥船耙头;设计一套能够快速、准确测量耙头挖掘深度的系统,对耙头的施工过程和状态进行实时监测,并为挖土方量的计算提供准确的参数信息。
6.为实现上述目的,本发明提供了以下技术方案:
7.一种新型耙吸挖泥船耙头,包括耙头(3)、活动罩转轴(4)、液压缸(5)、耐磨块(6)、活动罩(7)、耙齿高压冲水软管(8)、耙齿(13),其特征在于,还包括活动罩转轴角度传感器(9)、测量杆转轴角度传感器(10)、测量杆(11)、耐磨压载球(12)、安装块(15)、测量杆转轴(16),其中的活动罩转轴角度传感器(9)、测量杆转轴角度传感器(10)、测量杆(11)、耐磨压载球(12)、安装块(15)和测量杆转轴(16)组成了挖掘深度测量系统;
8.活动罩转轴角度传感器(9)安装于活动罩转轴(4)内,用于测量施工过程中测量杆转轴(16)中心和活动罩转轴(4)中心的连线与竖直方向的夹角;
9.耐磨压载球(12)安装于测量杆(11)的末端,用于疏浚施工过程中保障测量杆 (11)末端始终与施工后泥面(17)接触,测量杆(11)另一端与测量杆转轴(16)相连,测量杆转轴(16)安装于安装块(15)上,安装块(15)安装于活动罩(7)上;
10.测量杆转轴(16)内安装有测量杆转轴角度传感器(10),用于测量施工过程中测量杆(11)与竖直方向的夹角。
11.与耙吸挖泥船疏浚耙头的现有技术相比,本发明的创新与优点在于:改装耙吸挖泥船耙头,设计了一套完善的挖掘深度测量系统,该系统能够快速、准确的测量出耙头的挖
泥深度,完成施工过程中挖泥方量的计算,并实时监测耙头的施工状态,为耙吸挖泥船的智能化施工提供可靠的参数,从而达到提高疏浚效率,降低疏浚能耗的目的。
附图说明
12.图1所示为耙吸挖泥船、耙管和耙头的连接示意图。
13.图2所示为现有耙头的结构示意图。(现有的)
14.图3所示为本发明实施例提供的耙头结构示意图。(构造图)
15.图4所示为本发明实施例提供的耙头结构侧视图。(测量系统硬件)
16.图5所示为本发明测量系统结构示意图。
17.图6所示为本发明挖掘深度测量与计算示意图。
18.图7所示为本发明实施例提供的挖掘深度测量系统的数据采集与监控系统。
19.标记说明:
20.耙吸挖泥船1、耙管2、耙头3、活动罩转轴4、液压缸5、耐磨块6、活动罩7、耙齿高压冲水软管8、活动罩转轴角度传感器9、测量杆转轴角度传感器 10、测量杆11、耐磨压载球12、耙齿13、施工前泥面14、安装块15、测量杆转轴16、施工后泥面17。
具体实施方式
21.为能进一步了解本发明的发明内容、特点及功效,兹列举以下实施例,并配合附图对本发明作如下详细说明:
22.参照各图:
23.耙吸挖泥船1在施工过程中首先会下放耙管2,让耙头3与施工前泥面14 相接触,耙头3通过液压缸5和耙头3的自身重力作用将耙齿13压入泥土中,并通过耙吸挖泥船1的向前运动带动耙头3实现挖掘。这是领域内公知的作业方式。
24.接近的现有技术:现有耙头在施工过程中,是通过耙管2、耙头3精确数值模型的建立,在耙头3上安装压差传感器、活动罩行程和压力传感器,并结合耙管水平和垂直角度传感器来监测耙头3的位置,并对挖掘泥土方量进行预估,然而,由于耙齿13与土体相互作用的复杂性及施工土质的多变性等因素,可能会导致施工过程中出现跳耙等诸多异常现象,因此,现有耙头在施工过程中的预估挖土方量与实际的挖土方量存在较大程度上的误差。
25.实施例1耙头硬件改造,用于构建挖掘深度测量系统
26.一种改造后的耙吸挖泥船耙头,是在现有耙头的基础上设计增加了一套挖掘深度测量系统,包括耙头3、活动罩转轴4、液压缸5、耐磨块6、活动罩7、耙齿高压冲水软管8、活动罩转轴角度传感器9、测量杆转轴角度传感器10、测量杆11、耐磨压载球12、耙齿13、安装块15、测量杆转轴16,其中的活动罩转轴角度传感器9、测量杆转轴角度传感器10、测量杆11、耐磨压载球12、安装块 15和测量杆转轴16等部件组成了挖掘深度测量系统;
27.活动罩转轴角度传感器9安装于活动罩转轴4内,用于测量施工过程中测量杆转轴16中心和活动罩转轴4中心的连线与竖直方向的夹角;
28.耐磨压载球12安装于测量杆11的末端,用于疏浚施工过程中保障测量杆 11末端始终与施工后泥面17接触,测量杆11另一端与测量杆转轴16相连,测量杆转轴16安装于安装块15上,安装块15安装于活动罩7上;
29.测量杆转轴16内安装有测量杆转轴角度传感器10,用于测量施工过程中测量杆11与竖直方向的夹角。
30.实施例2软件算法及挖掘深度测量应用
31.基于实施例1进一步公开应用原理及算法:
32.活动罩转轴角度传感器9安装于活动罩转轴4内,用于测量施工过程中测量杆转轴16中心和活动罩转轴4中心的连线与竖直方向的夹角θ2,耐磨压载球 12安装于测量杆11的末端,在疏浚施工过程中,通过耐磨压载球12的重量来保障在耙头后面的流场中测量杆11末端始终与施工后泥面17接触,测量杆11 另一端与测量杆转轴16相连,测量杆转轴16安装于安装块15上,安装块15安装于活动罩7上,测量杆转轴16内安装有测量杆转轴角度传感器10,用于测量施工过程中测量杆11与竖直方向的夹角θ1。
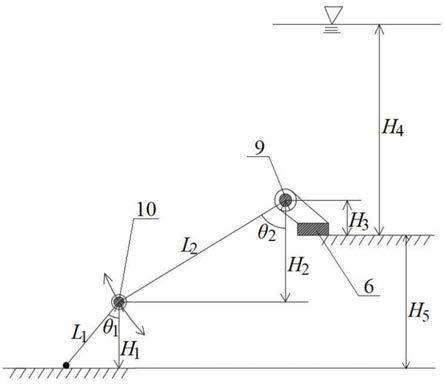
33.如图5和图6所示,在耙吸挖泥船的疏浚施工过程中,水面与施工前泥面14 的垂直距离h4可根据海底地形图得知,而耙头的实际挖泥方量q可根据施工前泥面14和施工后泥面17的垂直距离h5和耙头3的吸入口面积a进行计算。本发明中,由实施例1披露的耙头3的结构可知:活动罩转轴4的中心与耐磨块的下端面距离h3、活动罩转轴4中心与测量杆转轴16中心距离l2及测量杆长度 l1均为已知常量。在施工过程中,耐磨块6紧贴施工前泥面14,耐磨压载球12 由于重力作用始终与施工后泥面17相接触,由三角函数关系,可通过如下计算公式求取施工过程中耙头3的挖掘深度h5:
34.h1=l1·
cosθ1ꢀꢀꢀ
(1)
35.h2=l2·
cosθ2ꢀꢀꢀꢀ
(2)
36.h5=h1+h
2-h3ꢀꢀꢀ
(3)
37.其中,h1为测量杆转轴16中心与施工后泥面17的垂直距离,h2为活动罩转轴4中心与测量杆转轴16中心竖直方向的距离,θ1为测量杆11与竖直方向的夹角,θ2为活动罩转轴4和测量杆转轴16的连线与竖直方向的夹角,θ1和θ2分别通过测量杆转轴角度传感器10和活动罩转轴角度传感器9进行实时测量,h4为施工前泥面14与水面的垂直距离,h5为耙头施工过程中的实际挖掘深度(即需要求解的量)。
38.根据耙头施工过程中的实际挖泥深度h5和耙头3的吸入口面积a可得耙头的实际挖泥方量q为:
39.q=h5·aꢀꢀꢀ
(4)
40.实施例3挖掘深度测量系统
41.基于实施例2进一步开发的耙吸挖泥船测量系统:
42.该船载耙吸挖泥船测量系统包括数据采集系统、数据线传输系统、海底地形图、监控系统、显示系统,其中:
43.数据采集系统包括活动罩转轴角度传感器9、测量杆转轴角度传感器10,分别用于获得测量杆转轴16中心和活动罩转轴4中心的连线与竖直方向的夹角θ2及测量杆11与竖直方向的夹角θ1;
44.数据线传输系统为防水的数据线;耙吸挖泥船上的数据采集系统与监控系统通过数据线传输系统从活动罩转轴角度传感器9、测量杆转轴角度传感器10中获得测量杆转轴16中心和活动罩转轴4中心的连线与竖直方向的夹角θ2及测量杆11与竖直方向的夹角θ1,提供给监控系统;
45.海底地形图实时将水面与施工前泥面14的垂直距离h4提供给监控系统;
46.监控系统利用预制的参数和实时接收参数,进行转换成三角函数cosθ2和 cosθ1,并根据实施例2公式(1)~(4)求得耙头的实际挖泥方量q,通过q的实时监测可监控耙头的施工状态,由显示系统展示出来。
47.该测控系统能够快速、准确的测量出耙头的挖泥深度,完成施工过程中挖泥方量的计算,并实时监测耙头的施工状态,为耙吸挖泥船的智能化施工提供可靠的参数,从而提高耙吸挖泥船的疏浚效率,降低疏浚能耗。
48.需要说明的是,以上所述仅是对本发明的较佳实施例而已,并非对本发明作任何形式上的限制,本发明实施例中描述的技术特征或者技术特征的组合不应当被认为是孤立的,它们可以被相互组合从而达到更好的技术效果,对于相关领域普通技术人员已知的技术、方法和设备不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限定。因此,示例性实施例的其它示例可以具有不同的值。凡是依据本发明的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1