一种工业挖掘机的操作杆结构的制作方法
1.本实用新型涉及挖掘机技术领域,具体涉及一种基于万向铰连接的工业挖掘机的操作杆结构。
背景技术:
2.挖掘机操作杆是挖掘机工作部件的操控装置,其操控灵敏性决定了挖掘机的工作效率。目前操作杆常见的运动方式为相对驾驶员前后摆动,而挖掘机的工作既需要前后摆动,也需要左右移动,实现物料的装卸,这使得操作杆的摆动方向与挖臂的实际运动方向出现不一致,容易导致驾驶员误操作。
技术实现要素:
3.针对现有技术的不足,本实用新型提供一种基于万向铰连接的工业挖掘机操作杆结构,其操作杆运动方向与挖臂运动方向保持一致,使得挖掘机的操控更直观,不易出错。
4.本实用新型的目的是通过如下技术方案实现的:
5.一种工业挖掘机的操作杆结构,包括操作杆本体、万向铰、第一码盘、第二码盘,第一液压式位置跟随器、第二液压式位置跟随器及液压系统,所述万向铰包括轴线位于同一水平面内的第一横轴、第二横轴和纵轴,其中:所述第一横轴的一端与所述纵轴垂直固定连接,另一端上安装所述第二码盘;所述纵轴通过轴承支撑在一平台上,纵轴的一端与所述第二液压式位置跟随器连接,另一端上安装所述第一码盘;操作杆本体的下端为具有两个臂的叉形结构,其中一个臂与所述第一横轴可旋转连接,在该臂朝向所述第二码盘的一侧上安装有第二光电传感器,用于检测操作杆本体绕第一横轴旋转的速度和角度;操作杆本体下端的另一个臂与所述第二横轴的一端固定连接,第二横轴的另一端与所述第一液压式位置跟随器连接;在所述操作杆本体和第一码盘之间的平台上安装有第一光电传感器,用于检测操作杆本体绕纵轴旋转的速度和角度;所述第一液压式位置跟随器和第二液压式位置跟随器用于在所述操作杆本体移动到某一位置时,对该位置进行保持;所述液压系统用于为所述第一液压式位置跟随器和第二液压式位置跟随器供油,保持叶片两侧液压相等。
6.所述第一液压式位置跟随器和第二液压式位置跟随器结构相同,均包括一卧式的半圆柱体形的腔体,该腔体由圆弧形顶面、底面和前后侧面围成,在所述底面的中部可旋转地密封连接一转轴;在该转轴两侧的底面上各开有一油孔;所述液压系统包括4个液压泵,每个油孔分别经油管连接一液压泵;在该转轴上安装有一叶片,所述叶片、转轴将所述半圆柱体形的腔体分隔成两个不连通的空腔。
7.优选的是,所述第二横轴与所述第一液压式位置跟随器的转轴一体形成;所述纵轴与所述第二液压式位置跟随器的转轴一体形成。
8.本实用新型的基于万向铰连接的工业挖掘机操作杆结构,利用操作杆相对于驾驶员的前后和左右摆动对挖臂的前后和左右摆动进行控制,其控制方式直观,并且通过液压式位置跟随器对操作杆位置进行固定,保证驾驶员手离开操作杆后,操作杆的位置可以保
持不动,方便驾驶员在操作过程中进行其他功能的操作,其结构简单易于维护。
附图说明
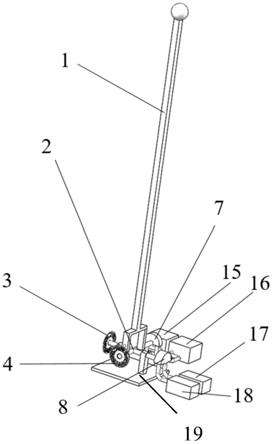
9.图1为本实用新型的整体结构示意图;
10.图2为操作杆底部结构放大后的示意图;
11.图3为第一液压式位置跟随器内部结构示意图;
12.图4为第二液压式位置跟随器内部结构示意图。
13.图中:1、操作杆2、万向铰2a、第一横轴2b、第二横轴2c、纵轴3、第一码盘4、第二码盘5、第一光电传感器6、第二光电传感器7、第一液压式位置跟随器8、第二液压式位置跟随器9、第一长方体叶片10、第二长方体叶片11、第一油管12、第二油管13、第三油管14、第四油管15、第一液压泵16、第二液压泵17、第三液压泵18、第四液压泵。
具体实施方式
14.以下结合附图对本实用新型的技术方案进行详细说明。
15.参见图1和图2,本实用新型的工业挖掘机的操作杆结构包括:操作杆本体1、万向铰2、第一码盘3、第二码盘4,第一液压式位置跟随器7、第二液压式位置跟随器8以及液压系统。
16.具体地说,所述万向铰2包括轴线位于同一水平面内的第一横轴2a、第二横轴2b和纵轴2c,其中:所述第一横轴2a的一端与所述纵轴2c垂直固定连接,另一端上安装所述第二码盘4;所述纵轴2c通过轴承支撑在一平台19上,纵轴2c的一端与所述第二液压式位置跟随器8连接,另一端上安装所述第一码盘3。
17.操作杆本体1的下端为具有两个臂的叉形结构,其中一个臂与所述第一横轴2a可旋转连接,在该臂朝向所述第二码盘4的一侧上安装有第二光电传感器6,用于检测操作杆本体1绕第一横轴2a旋转的速度和角度,检测值用于对挖臂的运动进行控制。操作杆本体1下端的另一个臂与所述第二横轴2b的一端固定连接,第二横轴2b的另一端与所述第一液压式位置跟随器7连接。在所述操作杆本体1和第一码盘3之间的平台19上安装有第一光电传感器5,用于检测操作杆本体1绕纵轴2c旋转的速度和角度,检测值用于对挖臂的运动进行控制。
18.所述第一液压式位置跟随器7和第二液压式位置跟随器8用于在所述操作杆本体1移动到某一位置时,对该位置进行保持。所述液压系统用于为所述第一液压式位置跟随器7和第二液压式位置跟随器8供油,保持叶片两侧液压相等。
19.所述第一液压式位置跟随器7和第二液压式位置跟随器8结构相同,均包括一卧式的半圆柱体形的腔体,该腔体由圆弧形顶面、底面和前后侧面围成,在所述底面的中部可旋转地密封连接一转轴;在该转轴两侧的底面上各开有一油孔;所述液压系统包括4个液压泵,每个油孔分别经油管连接一液压泵;在该转轴上安装有一叶片,所述叶片、转轴将所述半圆柱体形的腔体分隔成两个不连通的空腔。
20.参见图3和图4,在本实用新型的一个实施例中,所述第二横轴2b与所述第一液压式位置跟随器7的转轴一体形成;所述纵轴2c与所述第二液压式位置跟随器8的转轴一体形成。第一液压式位置跟随器7内装有第一长方体叶片9,第二液压式位置跟随器8内装有第二
长方体叶片10,将液压式位置跟随器内部分割为两个不连通的空间。
21.参见图2、图1和图3,第一液压式位置跟随器7底面上的两个油孔分别连接第一油管 11和第二油管12,第一油管11和第二油管12另一端连接第一液压泵15和第二液压泵16,第一液压泵15和第二液压泵16通过第一油管11和第二油管12向第一液压式位置跟随器7 内供油,保持第一长方体叶片9两侧液压相等,保证第一长方体叶片9位置不动,进而保证驾驶员手离开操作杆1后,操作杆1的位置可以保持不动,有益于施工操作。
22.参见图2、图1和图4,第二液压式位置跟随器8底面上的两个油孔分别连接第三油管 13和第四油管14,第三油管13和第四油管14另一端连接第三液压泵17和第四液压泵18,第三液压泵17和第四液压泵18通过第三油管13和第四油管14向第二液压式位置跟随器8 内供油,保持第二长方体叶片10两侧液压相等,保证第二长方体叶片10位置不动,进而保证驾驶员手离开操作杆1后,操作杆1的位置可以保持不动,有益于施工操作。
23.操作杆1摆动过程中,第一液压式位置跟随器7、第一油管11和第二油管12会随着操作杆1进行运动,因此油管材质应为软塑料,并且具有较长的长度。
24.码盘4和第一横轴2a相对于操作杆不动,光电传感器6随着操作杆转动。与操作杆连接的第二横轴2b是随着操作杆转动的,带动位置跟随器7里面的叶片9转动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1