一种轮斗挖掘机取料臂回转检测系统的制作方法
1.本实用新型属于智能控制技术领域,具涉及一种轮斗挖掘机取料臂回转检测系统。
背景技术:
2.轮斗挖掘机取料工艺通过行走预置的进尺深度,轮斗旋转挖掘物料,再通过悬臂皮带机等工艺运输到下游系统;在取料过程中,要求轮斗臂在工作角度扇形区域循环往复左右回转。在生产过程中,由于工作面范围会随工况而随时调整,以及物料边界自然滑坡角物料;使得轮斗挖掘机自动取料回转不能自适应边界物料情况,反馈不及时造成悬臂空转,降低取料量,影响生产能力;空转也造成能耗的浪费,增加运行成本,也违背绿色节能矿山理念。
技术实现要素:
3.根据上述问题和现有技术的不足,本实用新型提供了一种轮斗挖掘机取料臂回转检测系统。
4.本实用新型是通过如下技术方案实现的:一种轮斗挖掘机取料臂回转检测系统,其特征在于:包括与轮斗挖掘机取料臂前端固定连接的底座,在底座一侧设置有两组检测装置,上部检测装置水平设置,下部检测装置斜向下方设置;所述检测装置包括固定支架,螺栓连接在固定支架上的保护罩,在保护罩内设置有安装板,在安装板上固定的激光漫反射测距开关;在固定支架上设置有多个螺栓孔;还包括调整支架,调整支架的一端铰接在底座上,另一端通过螺栓与下部检测装置的螺栓孔相连接。
5.本实用新型的优点是:本实用新型的轮斗挖掘机取料臂回转检测系统及回转方法,所述检测系统设置有两组检测装置,对采掘过程中,物料的滑落有良好的检测效果。测距开关均设置在保护罩内部,可防止物料对其的破坏,下部检测装置中设置有调整支架,可对下部检测装置起到支撑和调整作用,使其角度稳定。所述回转方法利用激光探测技术对轮斗挖掘机轮斗臂回转边界状态进行判断;通过控制器采集数据和进行逻辑判断;若数据信息同时发生变化则判断到达边界位置。该装置能够及时完成在边缘角度快速的判断物料情况,并及时发出下一步指令,减少取料臂回转空转时间,节能增效,提高系统的生产能力。本实用新型所述方案还具有设备简单,易于实现,成本低,便于布设及安装的优点,可在露天轮斗挖掘机智能控制系统中广泛推广。
附图说明
6.图1为本实用新型轮斗挖掘机的结构示意图;
7.图2为本实用新型工作状态示意图;
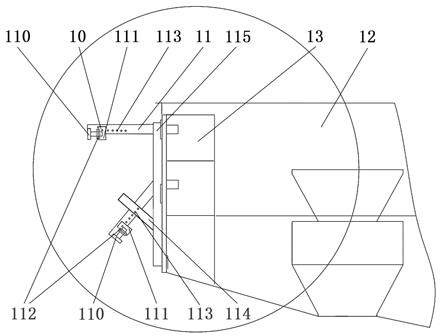
8.图3为本实用新型整体结构示意图;
9.图4为本实用新型部分结构示意图。
10.图中序号说明如下:10检测装置、11固定支架、110激光漫反射测距开关、111保护罩、112安装板、113螺栓孔、114调整支架、12轮斗臂、13排料遮挡板、14物料工作面、s1第一激光漫反射测距开关,s2第二激光漫反射测距开关;15司机室、16电气室,p控制器数据采集处理单元,m触摸屏显示单元。
具体实施方式
11.下面结合附图1~4和实施例对本实用新型作进一步详细说明。此处所描述的实施例仅对本实用新型的解释,而非对本实用新型的限制。
12.本实用新型公开了一种轮斗挖掘机取料臂回转检测系统,其包括底座115,底座与轮斗挖掘机取料臂前端固定连接,具体的与轮斗臂12前端的排料遮挡板13焊接或螺栓连接,在底座一侧设置有两组检测装置10,上部检测装置水平设置,下部检测装置斜向下方设置;所述检测装置包括固定支架11,螺栓连接在固定支架上的保护罩111,在保护罩内设置有安装板112,在安装板上固定的激光漫反射测距开关110;在固定支架上设置有多个螺栓孔113;还包括调整支架114,调整支架的一端铰接在底座上,另一端通过螺栓与下部检测装置的螺栓孔相连接。
13.优选的:所述激光漫反射测距开关与控制器电性连接或信号连接。
14.优选的:所述下部检测装置与水平夹角为40-45度。
15.本实用新型的轮斗挖掘机取料臂回转检测系统,设置有两组检测装置,对采掘过程中,物料的滑落有良好的检测效果。测距开关均设置在保护罩内部,可防止物料对其的破坏,下部检测装置中设置有调整支架,可对下部检测装置起到支撑和调整作用,使其角度稳定。本实用新型所述方案还具有设备简单,易于实现,成本低,便于布设及安装的优点,可在露天轮斗挖掘机智能控制系统中广泛推广。
16.本实用新型还公开了一种轮斗挖掘机取料臂回转方法,其中,上部检测装置的激光漫反射测距开关即第一测距开关为s1,下部检测装置的激光漫反射测距开关即第二测距开关为s2;采用两组检测装置,可以更好的适应工作面物料的不均匀性,同时,针对边界物料挖掘及自然滑坡造成的料堆下面比上面突出的情况,也增加了边界检测的准确性,所述方法包括如下步骤:
17.步骤1:设定测距开关输出为开关量信号,开关反馈的信号用1表示动作,用0表示未动作;
18.步骤2:调整s1的位置,使其与采掘面的竖直面相配合,调整s2的位置,使其与采掘面中可能存在的滑落的物料面相配合;同时,使开关在未达边界时,与物料的检测信号一直处于触发动作信号,即信号为1;
19.步骤3:取料工况时,取料臂回转启动或保持运行状态,检测装置系统启动或保持运行状态,控制器采集s1、s2的动作信号;根据其被触发情况,判断是否达到边界,并执行步骤4-7中的对应步骤;
20.步骤4:当s1为1时且s2为1时,控制器判断取料臂未达到边界,取料臂继续回转,并返回至步骤3;
21.步骤5:当s1为1时且s2为0时,控制器判断s2对应的工作面不平整有滑落区,即对应采掘面有凹陷区,增加取料臂回转速度来保证凹区缺失的物料,至s2为1时,恢复到正常
回转速度,并返回至步骤3;
22.步骤6:当s1为0时且s2为1时,控制器判断取料臂预计达到边界,增加取料臂回转速度来保证预边界顶部缺失的物料,保证取料的恒定,并返回至步骤3;
23.步骤7:当s1为0时且s2为0时,控制器判断取料臂达到边界,执行步骤8;
24.步骤8:确认s1为0时且s2为0时,停止回转,显示器显示回转停止。
25.优选的:所述步骤8中,当确认s1为0时且s2为0后,保持取料臂正常回转速度或低速回转10-30s后停止。
26.优选的:步骤3中,控制器采集s1、s2的动作信号时,两次采集中间有一定时间间隔,时间间隔为30s至5min。
27.下面对本方案做进一步的描述。
28.本实用新型是一种通过激光测距的装置检测物料工作区域边界检测,并准确快速的反馈给控制器,实现轮斗挖掘机取料臂智能识别回转边界物料环境情况的进行综合判断,及时的下发反转指令,减少悬臂轮斗空转时长。本实用新型具体的技术方案如下:
29.为实现上述目的,本实用新型的第一方面是一种轮斗挖掘机取料臂回转智能控制系统检测装置,包括开关安装固定支架、安装在固定支架上的激光漫反射测距开关,以及数据采集控制器单元p和显示单元m。所述检测装置的安装板112与保护罩111焊接或螺接;保护罩111与激光漫反射测距开关110栓接,固定支架上有多个螺栓孔,保护罩可与不同的螺栓孔相配合从而位置可微调整。所述的激光漫反射测距检测开关安装在安装板的安装孔内。所述的激光漫反射检测开关由第一测距开关和第二测距两组开关组成,分别用s1、s2表示。其中,所述的第一测距开关s1水平向前安装;所述的第二测距开关s2倾斜向前安装40-45度。所述的激光漫反射检测开关输出为开关量信号,开关反馈的信号用1表示动作,用0表示未动作。反复调整s1 和s2开关位置,使得开关在未达边界时,与物料的检测信号一直处于触发动作信号,即信号为1;所述的数据处理单元p安放在电气室16的plc控制柜内,实时采集激光雷达开关信息,进行分析、运算和决策,输出轮斗臂的控制信息和检测边界物料距离值。所述的显示单元m安装在司机室15,用于显示控制器数据处理单元输出轮斗臂的控制信息和检测边界物料距离信号,轮斗臂控制信息包括要求轮斗臂左转、右转、停止指令。
30.本实用新型的轮斗挖掘机排料臂进给取料,轮斗臂受料处物料挡板与物料工作面安全距离为500-600mm的距离,因此在选择激光开关检测距离为15米;具有漫反射功能,不需要挡板,可以直接投射在物料上进行距离检测。
31.控制器数据采集处理单元选用先进的可编程控制器产品,包括槽架、电源模块、cpu模块、通讯模块、io模块等组成,支持以太网接口协议,控制器p安装在电气室16控制柜内;显示单元选用先进的触摸屏产品,支持以太网接口协议,显示单元m安装在司机室15内;控制器数据采集处理单元与触摸屏显示单元之间通过超五类屏蔽网线连接,并与开关s1和s2并与通过a类阻燃屏蔽cefr10x1.5控制软电缆连接。
32.上所述仅为本实用新型技术方案的进行说明,本实用新型保护范围并不仅限于上述实施方式,凡是属于本实用新型原理的技术方案均属于本实用新型的保护范围。对于本领域的技术人员而言,在不脱离本实用新型的原理的前提下进行的若干改进,这些改进也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1